基于同步离合器的全驱特种车辆双侧双电机独立驱动总成
文献发布时间:2023-06-19 11:50:46
技术领域
本发明涉及特种车辆动力传动技术领域,特别是指一种基于同步离合器的全驱特种车辆双侧双电机独立驱动总成,具体发明的是一种基于同步离合器的多轴轮式全驱特种车辆双侧双电机独立驱动总成。
背景技术
随着技术进步,特种车辆(包括轮式车辆和履带式车辆)的动力系统也在发生变革与进步,目前已经出现了纯电动特种车辆、混合动力特种车辆、燃料电池特种车辆等,呈现多元化、电动化发展趋势。例如,美国陆军班组多用途装备运输(SMET,Small MultipurposeEquipment Transport)无人车项目,该研究计划2012年启动;2017年4月,共有9家供应商获得了SMET无人车第一个阶段合同;2017年12月,4家供应商进入了SMET无人车计划的第二阶段;2019年10月,美国陆军经过筛选,选中通用动力陆地系统公司(GDLS)设计生产的MUTT(Multi-Utility Tactical Transport)多用途战术运输车作为美军SMET班组多用途装备运输无人车计划的最终获胜者。GDLS公司MUTT 8×8轮式无人车最大载重量544kg,整车最大总质量1587kg,车长2946mm,车宽1778mm,在装备标准燃油箱的情况下,采用混合动力,最大行驶距离可达96km,当选装附加一个22.7L的燃油箱的情况下,可再行驶58km,可选装是否加装两栖行驶模块,能够对外输出3kW的电力,远程控制距离范围200m,远程操纵及半自动控制均是可选的。
以电机驱动作为驱动系统的车辆,其驱动系统的布局方式主要分为两大类:分布式、集中式。分布式驱动系统的特征是将驱动电机分散布置于多个车轮,每个驱动电机通过各自的减速器装置或者是传动半轴等将动力传递至各自对应的车轮。在设计技术细节上,假如将电机、减速机构以及轮毂相结合,则构成轮边电机驱动结构或轮毂电机驱动结构。分布式驱动系统的驱动传动路径短,传动效率高,结构紧凑,车内空间利用率高,但是电机的散热结构、驱动系统的轻量化等不容易设计。集中式驱动系统的特征是单个电机的动力输出或者多个电机的动力输出,首先全部进入减速器,然后再输出经过传动轴、差速器等机械装置将动力传递至车轮。集中式驱动系统的布局形式延续了传统内燃机作为动力装置的车辆的驱动系统布局形式,因此,技术成熟,应用广泛。
以电机驱动作为驱动系统的车辆,若其采用两台电机,利用不同的动力耦合装置将两台电机的动力合并之后再经传动系统驱动车辆,其优点是可以降低单台电机的转矩容量,有利于电机向高速化发展,进而可以提高车辆整个驱动系统的功率密度。两台电机的工作点也可以灵活设计,分开调节,有利于优化驱动系统的效率。此外,两台电机控制灵活,模式切换平顺,驱动冲击较小。因此,双电机耦合驱动是目前的一个研究热点,常见的双电机耦合方式主要包括转速耦合、转矩耦合以及功率耦合。但是,双电机耦合驱动实现车辆的双侧车轮独立驱动、中心转向等功能是比较复杂和比较困难的。
为了克服双电机耦合驱动的不足,双侧双电机独立驱动也被应用于特种车辆中,尤其是多见于履带式特种车辆。然而,双侧双电机独立驱动也是存在固有缺陷的,主要表现在:由于两侧驱动电机之间没有机械连接,车辆的行驶稳定性和转向性能等均对驱动电机控制系统提出了更高的响应速度和控制精度的要求;在车辆低速时,出现的问题并不严重,但是随着车辆行驶速度的提高,两侧驱动电机的转速的微小差异就会影响车辆直线行驶的稳定性;这对于有人驾驶特种车辆,严重增加了驾驶员的工作负担,驾驶员要不停地修正方向盘才能使车辆基本保持直线行驶;即使对于无人驾驶特种车辆,这一缺陷也严重增加了车辆控制系统的设计难度,车辆方向稳定性较差,并且不容易达到控制收敛,甚至会始终存在双侧驱动电机转速差即车辆转向角的小幅振荡,表现为车辆行驶状态为蛇形直线。
发明内容
本发明要解决的技术问题是提供一种基于同步离合器的全驱特种车辆双侧双电机独立驱动总成,具体为一种基于同步离合器的多轴轮式全驱特种车辆双侧双电机独立驱动总成,该驱动总成既能使车辆实现中心转向,又能使车辆实现稳定直线行驶以及稳定转向,并且结构紧凑,避免了传统双侧独立驱动车辆的复杂驱动结构,解决了双侧双电机独立驱动车辆的行驶方向稳定性问题。
该驱动总成包括同步离合器、左侧驱动电机总成和右侧驱动电机总成,其中,同步离合器包括同步离合器钢片盘毂、同步离合器钢片、同步离合器摩擦片、同步离合器壳体、同步离合器作动机构和同步离合器摩擦片盘毂;左侧驱动电机总成包括左侧驱动电机总成壳体、左侧驱动电机总成定子、左侧驱动电机总成转子、左侧驱动电机总成减速齿轮组、左侧驱动电机总成输出轴;右侧驱动电机总成包括右侧驱动电机总成壳体、右侧驱动电机总成定子、右侧驱动电机总成转子、右侧驱动电机总成减速齿轮组、右侧驱动电机总成输出轴;
同步离合器钢片盘毂通过花键与左侧驱动电机总成转子相连;多片同步离合器钢片套装于同步离合器钢片盘毂内,并能够轴向沿同步离合器钢片盘毂自由滑动;同步离合器摩擦片盘毂通过花键与右侧驱动电机总成转子相连;多片同步离合器摩擦片套装于同步离合器摩擦片盘毂外,并能够轴向沿同步离合器摩擦片盘毂自由滑动;多片同步离合器钢片与多片同步离合器摩擦片分别一一交替安装;同步离合器作动机构控制多片同步离合器钢片与多片同步离合器摩擦片的完全接合、部分接合以及完全分离;左侧驱动电机总成转子外部配合左侧驱动电机总成定子,左侧驱动电机总成转子作为左侧驱动电机总成减速齿轮组的输入部件,左侧驱动电机总成输出轴作为左侧驱动电机总成减速齿轮组的输出部件;右侧驱动电机总成转子外部配合右侧驱动电机总成定子,右侧驱动电机总成转子作为右侧驱动电机总成减速齿轮组的输入部件,右侧驱动电机总成输出轴作为右侧驱动电机总成减速齿轮组的输出部件;左侧驱动电机总成壳体、同步离合器壳体、右侧驱动电机总成壳体依次通过螺栓连接为一个整体壳体;左侧驱动电机总成输出轴、左侧驱动电机总成转子、右侧驱动电机总成转子、右侧驱动电机总成输出轴在空间位置上共轴线。
其中,同步离合器钢片和同步离合器摩擦片数量相同,均不少于三片。
当特种车辆直线行驶工况时,在同步离合器作动机构的作用下,同步离合器钢片和同步离合器摩擦片完全接触,即同步离合器完全接合,左侧驱动电机总成转子和右侧驱动电机总成转子刚性连接,不存在转速差,双侧车轮轮速完全相等。
当特种车辆左转弯工况或右转弯工况时,在同步离合器作动机构的作用下,同步离合器钢片和同步离合器摩擦片部分接触,同步离合器钢片和同步离合器摩擦片之间存在转速差并存在滑动摩擦,即同步离合器部分接合,左侧驱动电机总成转子和右侧驱动电机总成转子存在转速差并存在由同步离合器提供的额外摩擦阻尼,双侧车轮轮速差值稳定可控。
当特种车辆中心转向工况时,在同步离合器作动机构的作用下,同步离合器钢片和同步离合器摩擦片完全分离,同步离合器钢片的转速和同步离合器摩擦片的转速完全独立,即同步离合器完全分离,左侧驱动电机总成转子的转速和右侧驱动电机总成转子的转速完全独立,控制左侧驱动电机总成转子的转速和右侧驱动电机总成转子的转速大小相等方向相反,双侧车轮轮速大小相等方向相反。
本发明的上述技术方案的有益效果如下:
上述方案中,在特种车辆直线行驶工况时,同步离合器完全接合,左侧驱动电机总成转子和右侧驱动电机总成转子刚性连接,双侧车轮轮速完全相等,车辆实现稳定直线行驶,避免了传统双侧双电机独立驱动特种车辆直线行驶稳定性差的问题,并且可以使车辆以更高的车速实现稳定的直线行驶;在特种车辆左转弯工况或右转弯工况时,同步离合器部分接合,左侧驱动电机总成转子和右侧驱动电机总成转子存在转速差并存在由所述同步离合器提供的额外摩擦阻尼,双侧车轮轮速差值稳定可控,车辆实现稳定可控转向,避免了传统双侧双电机独立驱动特种车辆转弯工况转向稳定性差的问题,由于所述同步离合器提供的额外摩擦阻尼,使得左侧驱动电机总成转子和右侧驱动电机总成转子可以快速收敛至目标转速差,从而实现双侧车轮轮速差值稳定可控、车辆转向稳定且快速;在特种车辆中心转向工况时,同步离合器完全分离,左侧驱动电机总成转子的转速和右侧驱动电机总成转子的转速完全独立,控制所述左侧驱动电机总成转子的转速和所述右侧驱动电机总成转子的转速大小相等方向相反,则双侧车轮轮速大小相等方向相反,车辆实现原地中心转向,避免了传统履带式特种车辆为了实现原地中心转向功能而广泛采用的结构复杂的双功率流驱动总成,以结构简单、逻辑清晰的基于同步离合器的双侧双电机独立驱动总成实现了多轴轮式全驱特种车辆的原地中心转向功能。
附图说明
图1为本发明的基于同步离合器的全驱特种车辆双侧双电机独立驱动总成原理图;
图2为本发明的基于同步离合器的全驱特种车辆双侧双电机独立驱动总成三维图;
图3为本发明的基于同步离合器的全驱特种车辆双侧双电机独立驱动总成轴测图;
图4为本发明的基于同步离合器的全驱特种车辆双侧双电机独立驱动总成侧视图;
图5为本发明的基于同步离合器的全驱特种车辆双侧双电机独立驱动总成剖视图;
图6为本发明的同步离合器爆炸图;
图7为无同步离合器的多轴轮式全驱特种车辆双侧双电机独立驱动直线行驶工况双侧驱动电机转速变化曲线示意图;
图8为有同步离合器的多轴轮式全驱特种车辆双侧双电机独立驱动直线行驶工况双侧驱动电机转速变化曲线示意图;
图9为有无同步离合器对于多轴轮式全驱特种车辆双侧双电机独立驱动直线行驶工况双侧驱动电机转速差绝对值的影响示意图;
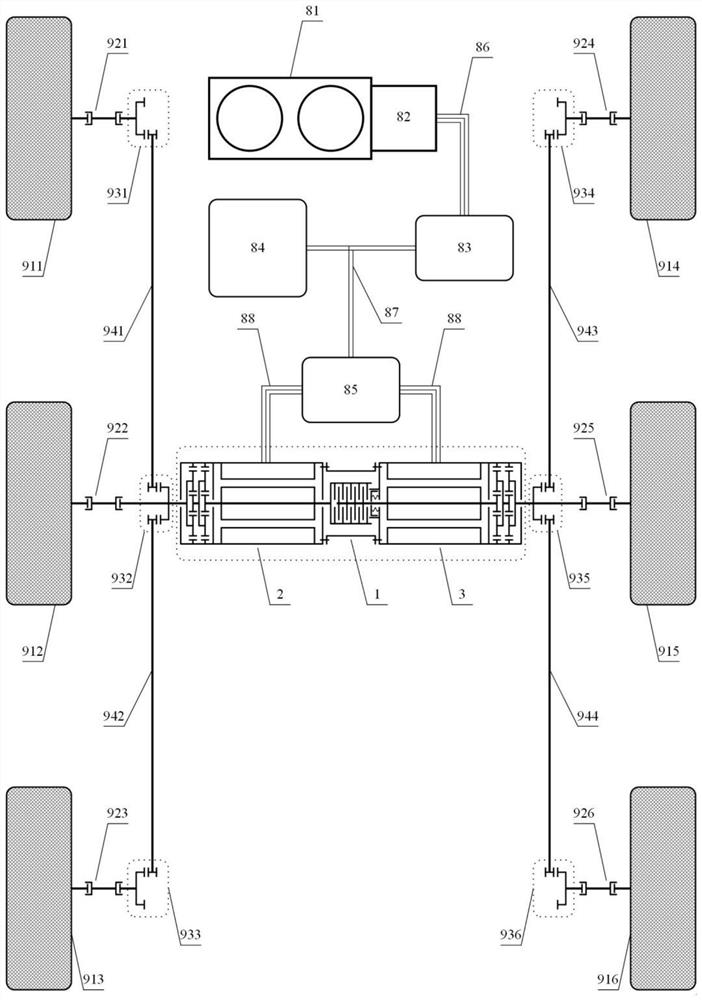
图10为基于同步离合器—双侧双电机独立驱动总成的多轴轮式全驱特种车辆实施例一的系统示意图;
图11为基于同步离合器—双侧双电机独立驱动总成的多轴轮式全驱特种车辆实施例一的控制逻辑图;
图12为基于同步离合器—双侧双电机独立驱动总成的多轴轮式全驱特种车辆实施例一的直线行驶工况示意图;
图13为基于同步离合器—双侧双电机独立驱动总成的多轴轮式全驱特种车辆实施例一的左转弯工况示意图;
图14为基于同步离合器—双侧双电机独立驱动总成的多轴轮式全驱特种车辆实施例一的右转弯工况示意图;
图15为基于同步离合器—双侧双电机独立驱动总成的多轴轮式全驱特种车辆实施例一的中心转向工况(向左侧中心转向)示意图;
图16为基于同步离合器—双侧双电机独立驱动总成的多轴轮式全驱特种车辆实施例一的中心转向工况(向右侧中心转向)示意图;
图17为基于同步离合器—双侧双电机独立驱动总成的多轴轮式全驱特种车辆实施例二的系统示意图。
其中:1-同步离合器;11-同步离合器钢片盘毂;12-同步离合器钢片;13-同步离合器摩擦片;14-同步离合器壳体;15-同步离合器作动机构;16-同步离合器摩擦片盘毂;2-左侧驱动电机总成;21-左侧驱动电机总成壳体;22-左侧驱动电机总成定子;23-左侧驱动电机总成转子;24-左侧驱动电机总成减速齿轮组;25-左侧驱动电机总成输出轴;3-右侧驱动电机总成;31-右侧驱动电机总成壳体;32-右侧驱动电机总成定子;33-右侧驱动电机总成转子;34-右侧驱动电机总成减速齿轮组;35-右侧驱动电机总成输出轴;81-柴油机;82-发电机;83-整流器;84-动力电池;85-电机控制器;86-交流线缆;87-直流线缆;88-交流线缆;911-车轮一;912-车轮二;913-车轮三;914-车轮四;915-车轮五;916-车轮六;921-半轴一;922-半轴二;923-半轴三;924-半轴四;925-半轴五;926-半轴六;931-轮边齿轮箱一;932-轮边齿轮箱二;933-轮边齿轮箱三;934-轮边齿轮箱四;935-轮边齿轮箱五;936-轮边齿轮箱六;941-传动轴一;942-传动轴二;943-传动轴三;944-传动轴四;951-链轮一;952-链轮二;953-链轮三;954-链轮四;955-链轮五;956-链轮六;961-链条一;962-链条二;963-链条三;964-链条四。
具体实施方式
为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
本发明提供一种基于同步离合器的全驱特种车辆双侧双电机独立驱动总成,具体为一种基于同步离合器的多轴轮式全驱特种车辆双侧双电机独立驱动总成。
如图1、图2、图3、图4、图5和图6所示,该驱动总成包括同步离合器1、左侧驱动电机总成2和右侧驱动电机总成3,其中,同步离合器1包括同步离合器钢片盘毂11、同步离合器钢片12、同步离合器摩擦片13、同步离合器壳体14、同步离合器作动机构15和同步离合器摩擦片盘毂16;左侧驱动电机总成2包括左侧驱动电机总成壳体21、左侧驱动电机总成定子22、左侧驱动电机总成转子23、左侧驱动电机总成减速齿轮组24、左侧驱动电机总成输出轴25;右侧驱动电机总成3包括右侧驱动电机总成壳体31、右侧驱动电机总成定子32、右侧驱动电机总成转子33、右侧驱动电机总成减速齿轮组34、右侧驱动电机总成输出轴35;
同步离合器钢片盘毂11通过花键与左侧驱动电机总成转子23相连;多片同步离合器钢片12套装于同步离合器钢片盘毂11内,并能够轴向沿同步离合器钢片盘毂11自由滑动;同步离合器摩擦片盘毂16通过花键与右侧驱动电机总成转子33相连;多片同步离合器摩擦片13套装于同步离合器摩擦片盘毂16外,并能够轴向沿同步离合器摩擦片盘毂16自由滑动;多片同步离合器钢片12与多片同步离合器摩擦片13分别一一交替安装;同步离合器作动机构15控制多片同步离合器钢片12与多片同步离合器摩擦片13的完全接合、部分接合以及完全分离;左侧驱动电机总成转子23外部配合左侧驱动电机总成定子22,左侧驱动电机总成转子23作为左侧驱动电机总成减速齿轮组24的输入部件,左侧驱动电机总成输出轴25作为左侧驱动电机总成减速齿轮组24的输出部件;右侧驱动电机总成转子33外部配合右侧驱动电机总成定子32,右侧驱动电机总成转子33作为右侧驱动电机总成减速齿轮组34的输入部件,右侧驱动电机总成输出轴35作为右侧驱动电机总成减速齿轮组34的输出部件;左侧驱动电机总成壳体21、同步离合器壳体14、右侧驱动电机总成壳体31依次通过螺栓连接为一个整体壳体;左侧驱动电机总成输出轴25、左侧驱动电机总成转子23、右侧驱动电机总成转子33、右侧驱动电机总成输出轴35在空间位置上共轴线。
其中,同步离合器钢片12和同步离合器摩擦片13数量相同,均不少于三片。
特种车辆直线行驶工况时,在同步离合器作动机构15的作用下,同步离合器钢片12和同步离合器摩擦片13完全接触,即同步离合器1完全接合,左侧驱动电机总成转子23和右侧驱动电机总成转子33刚性连接,不存在转速差,双侧车轮轮速完全相等。
特种车辆左转弯工况或右转弯工况时,在同步离合器作动机构15的作用下,同步离合器钢片12和同步离合器摩擦片13部分接触,同步离合器钢片12和同步离合器摩擦片13之间存在转速差并存在滑动摩擦,即同步离合器1部分接合,左侧驱动电机总成转子23和右侧驱动电机总成转子33存在转速差并存在由同步离合器1提供的额外摩擦阻尼,双侧车轮轮速差值稳定可控。
特种车辆中心转向工况时,在同步离合器作动机构15的作用下,同步离合器钢片12和同步离合器摩擦片13完全分离,同步离合器钢片12的转速和同步离合器摩擦片13的转速完全独立,即同步离合器1完全分离,左侧驱动电机总成转子23的转速和右侧驱动电机总成转子33的转速完全独立,控制左侧驱动电机总成转子23的转速和右侧驱动电机总成转子33的转速大小相等方向相反,双侧车轮轮速大小相等方向相反。
图7-图9所示是通过与传统特种车辆所采用的双侧双电机独立驱动在直线行驶典型工况的对比,重点说明本发明基于同步离合器的多轴轮式全驱特种车辆双侧双电机独立驱动总成由于在设计上引入了同步离合器,从而使整个驱动总成所表现出来的全新特征和独特优势。
图7所示为无同步离合器的多轴轮式全驱特种车辆双侧双电机独立驱动直线行驶工况双侧驱动电机转速变化曲线示意图,可见在车辆的左侧驱动电机与右侧驱动电机完全没有机械耦合或液力耦合的各自独立工作的情况下,完全靠电机控制系统实现电机的转速控制,理论上可以实现左侧驱动电机转速与右侧驱动电机转速完全相等,即车辆能实现直线行驶;但是,实际情况是,即使左侧驱动电机转速的期望值与右侧驱动电机转速的期望值恒相等,左侧驱动电机转速在期望值附近也存在小幅振荡,右侧驱动电机转速在期望值附近也同样存在小幅振荡,并且左侧驱动电机转速在期望值附近的小幅振荡与右侧驱动电机转速在期望值附近的小幅振荡是独立的、不相关的、随机的;这导致了车辆在直线行驶工况,方向并不稳定,无法高速直线行驶,严重时将导致行驶方向需要不断修正。
图8所示为有同步离合器的多轴轮式全驱特种车辆双侧双电机独立驱动直线行驶工况双侧驱动电机转速变化曲线示意图,与图7形成鲜明对比,对于搭载了基于同步离合器的双侧双电机独立驱动总成的特种车辆,在其直线行驶工况,通过控制指令使同步离合器完全接合,在同步离合器作用下,左侧驱动电机总成转子23与右侧驱动电机总成转子33很快实现刚性连接,即左侧驱动电机转速与右侧驱动电机转速达到完全相等,如图8所示,这使得车辆在直线行驶工况,无论车速如何,均能够稳定实现直线方向行驶。
图9所示为有无同步离合器对于多轴轮式全驱特种车辆双侧双电机独立驱动直线行驶工况双侧驱动电机转速差绝对值的影响示意图,其中实线表示没有搭载同步离合器时车辆双侧驱动电机转速差的绝对值变化情况,虚线表示搭载了同步离合器时车辆双侧驱动电机转速差的绝对值变化情况,通过对比,进一步阐明了基于同步离合器的双侧双电机独立驱动总成在车辆直线行驶工况确保方向稳定性的优势。
为了进一步说明本发明,介绍优选实施例一,如图10-图16所示。优选实施例一为一种搭载了本发明基于同步离合器的双侧双电机独立驱动总成的6×6特种车辆,该特种车辆采用柴油机增程式混合动力,该特种车辆的特征还包括全轮驱动、中心转向、两侧轮边传动采用齿轮传动。
优选实施例一:
如图10所示,本发明基于同步离合器的双侧双电机独立驱动总成包括同步离合器1、左侧驱动电机总成2、右侧驱动电机总成3;柴油机81驱动发电机82产生电能,发电机82所发交流电经过交流线缆86到达整流器83,整流得到直流电,整流器83经过直流线缆87分别连接动力电池84和电机控制器85;电机控制器85分别经过交流线缆88驱动左侧驱动电机总成2和右侧驱动电机总成3;
左侧驱动电机总成2通过左侧驱动电机总成输出轴25输出功率,功率首先传递至轮边齿轮箱二932,其中,三分之一的功率经过传动轴一941、轮边齿轮箱一931、半轴一921传递至车轮一911;三分之一的功率直接经过半轴二922传递至车轮二912;三分之一的功率经过传动轴二942、轮边齿轮箱三933、半轴三923传递至车轮三913;则左侧驱动电机总成2实现了对车轮一911、车轮二912、车轮三913的驱动;
右侧驱动电机总成3通过右侧驱动电机总成输出轴35输出功率,功率首先传递至轮边齿轮箱五935,其中,三分之一的功率经过传动轴三943、轮边齿轮箱四934、半轴四924传递至车轮四914;三分之一的功率直接经过半轴五925传递至车轮五915;三分之一的功率经过传动轴四944、轮边齿轮箱六936、半轴六926传递至车轮六916;则右侧驱动电机总成3实现了对车轮四914、车轮五915、车轮六916的驱动。
图11所示为基于同步离合器—双侧双电机独立驱动总成的多轴轮式全驱特种车辆实施例一的控制逻辑图,实施例一的特种车辆依据车辆状态参数和车辆控制参数判断当前车辆行驶工况,并将车辆行驶工况归为四类进行控制,分别是直线行驶工况、左转弯工况、右转弯工况、中心转向工况;其中,
在直线行驶工况时,在所述同步离合器作动机构15的作用下,所述同步离合器钢片12和同步离合器摩擦片13完全接触,即同步离合器1完全接合,左侧驱动电机总成转子23和右侧驱动电机总成转子33刚性连接,不存在转速差,双侧车轮轮速完全相等,车辆实现稳定直线行驶,具体如图12所示;
在左转弯工况时,在所述同步离合器作动机构15的作用下,所述同步离合器钢片12和同步离合器摩擦片13部分接触,同步离合器钢片12和同步离合器摩擦片13之间存在转速差并存在滑动摩擦,即同步离合器1部分接合,左侧驱动电机总成转子23和右侧驱动电机总成转子33存在转速差并存在由同步离合器1提供的额外摩擦阻尼,控制左侧驱动电机总成转子23的转速小于右侧驱动电机总成转子33的转速,左侧车轮轮速小于右侧车轮轮速,双侧车轮轮速差值稳定可控,车辆实现稳定可控左转弯,具体如图13所示;
在右转弯工况时,在所述同步离合器作动机构15的作用下,同步离合器钢片12和同步离合器摩擦片13部分接触,同步离合器钢片12和同步离合器摩擦片13之间存在转速差并存在滑动摩擦,即所述同步离合器1部分接合,左侧驱动电机总成转子23和右侧驱动电机总成转子33存在转速差并存在由同步离合器1提供的额外摩擦阻尼,控制左侧驱动电机总成转子23的转速大于右侧驱动电机总成转子33的转速,左侧车轮轮速大于右侧车轮轮速,双侧车轮轮速差值稳定可控,车辆实现稳定可控右转弯,具体如图14所示;
在中心转向工况时,在所述同步离合器作动机构15的作用下,所述同步离合器钢片12和同步离合器摩擦片13完全分离,同步离合器钢片12的转速和同步离合器摩擦片13的转速完全独立,即同步离合器1完全分离,左侧驱动电机总成转子23的转速和右侧驱动电机总成转子33的转速完全独立,控制左侧驱动电机总成转子23的转速和右侧驱动电机总成转子33的转速大小相等方向相反,双侧车轮轮速大小相等方向相反,车辆实现原地中心转向;若向左侧实现中心转向,则如图15所示,若向右侧实现中心转向,则如图16所示。
为了进一步说明本发明,介绍优选实施例二,如图17所示。优选实施例二为一种搭载了本发明基于同步离合器的双侧双电机独立驱动总成的6×6特种车辆,该特种车辆采用柴油机增程式混合动力,该特种车辆的特征还包括全轮驱动、中心转向、两侧轮边传动采用链条传动。
优选实施例二:
如图17所示,本发明基于同步离合器的双侧双电机独立驱动总成包括同步离合器1、左侧驱动电机总成2、右侧驱动电机总成3;柴油机81驱动发电机82产生电能,发电机82所发交流电经过交流线缆86到达整流器83,整流得到直流电,整流器83经过直流线缆87分别连接动力电池84和电机控制器85;电机控制器85分别经过交流线缆88驱动左侧驱动电机总成2和右侧驱动电机总成3;
左侧驱动电机总成2通过左侧驱动电机总成输出轴25输出功率,功率首先传递至链轮二952,其中,三分之一的功率经过链条一961、链轮一951、半轴一921传递至车轮一911;三分之一的功率直接经过半轴二922传递至车轮二912;三分之一的功率经过链条二962、链轮三953、半轴三923传递至车轮三913;则左侧驱动电机总成2实现了对车轮一911、车轮二912、车轮三913的驱动;
右侧驱动电机总成3通过右侧驱动电机总成输出轴35输出功率,功率首先传递至链轮五955,其中,三分之一的功率经过链条三963、链轮四954、半轴四924传递至车轮四914;三分之一的功率直接经过半轴五925传递至车轮五915;三分之一的功率经过链条四964、链轮六956、半轴六926传递至车轮六916;则右侧驱动电机总成3实现了对车轮四914、车轮五915、车轮六916的驱动。
基于同步离合器的双侧双电机独立驱动总成,实施例二所述特种车辆亦能实现稳定直线行驶、稳定转向以及原地中心转向等功能。
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 基于同步离合器的全驱特种车辆双侧双电机独立驱动总成
- 一种双侧独立驱动车辆主辅电机动力耦合总成