一种基于非对称往复阻尼的车辆ISD悬架结构及优化设计方法
文献发布时间:2023-06-19 11:50:46
技术领域
本发明涉及一种基于非对称往复阻尼的车辆ISD悬架的优化设计方法,属于车辆悬架减振技术领域。
背景技术
作为车辆底盘最为重要的部件之一,悬架对车辆行驶的平顺性和稳定性有至关重要的作用。目前,加入了惯质元件的ISD(Inerter-Spring-Damper)悬架因其能耗低、隔振效果优良引起了广泛关注。中国专利201410637469.6公开了一种车辆惯质悬架结构及其参数确定方法,利用改进的遗传算法对参数进行优化。X.Q.Sun在《Performance investigationof vehicle system with nonlinear ball-screw inerter》一文中通过建立考虑滚珠丝杠副摩擦和丝杠弹性效应的滚珠丝杠副非线性力学模型,并基于实验数据,采用递推最小二乘算法对非线性力学模型参数进行辨识,然后将非线性滚珠丝杠惯容器元件应用于三被动悬架半车模型的悬架分析,最后比较了非线性滚珠丝杠惯容器悬架系统和线性惯容器悬架系统的性能。略有遗憾的是,以上研究是基于理想对称往复阻尼的工况,而实际上阻尼会因悬架的拉伸和压缩两种不同情况呈现非对称的变化,因此,本文提出了一种基于非对称往复阻尼的车辆ISD悬架结构,进行优化设计和性能影响分析,提高实用价值。
发明内容
本发明旨在选取一种具有应用前景且结构简单的车辆ISD悬架,考虑压缩阻尼和伸张阻尼的非对称特性,有效地建立1/4车辆悬架动力学模型,并利用遗传算法进分别行单目标优化和多目标优化,对悬架进行仿真分析,验证所选ISD悬架的应用前景,为车辆ISD悬架的实际应用提供理论依据。
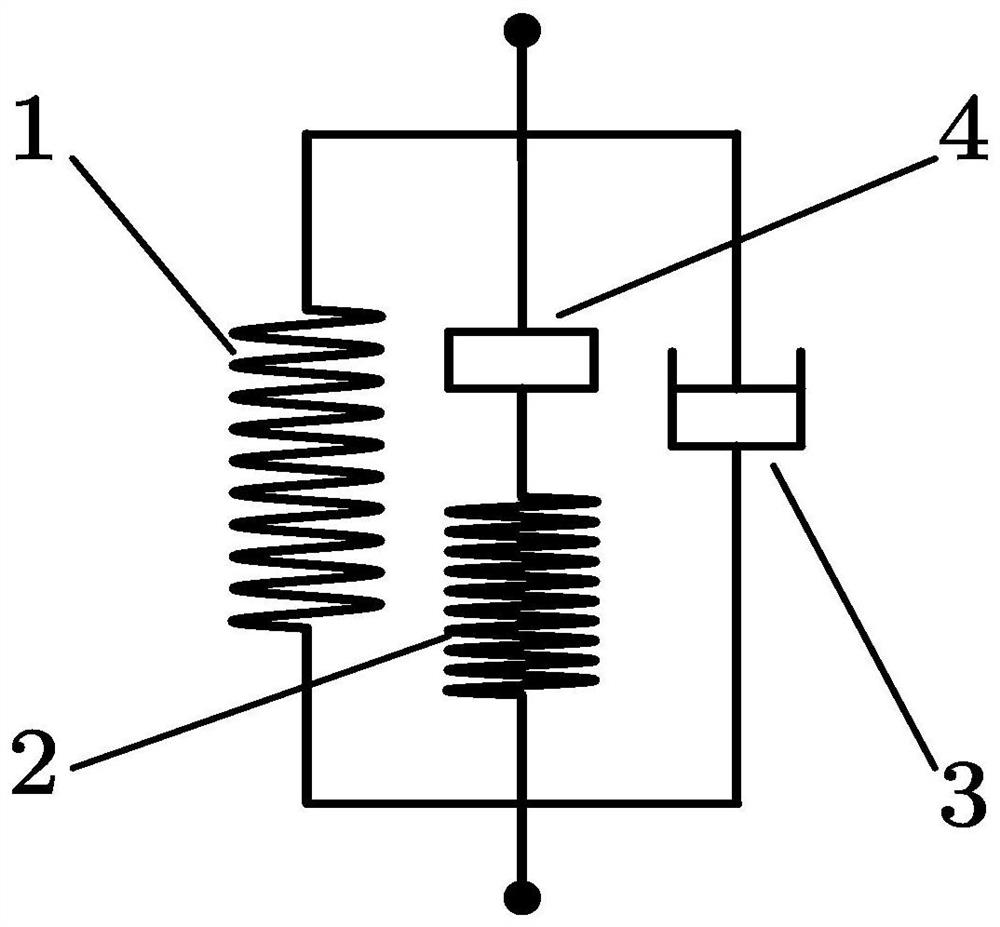
为实现以上发明目的,一种基于非对称往复阻尼的车辆ISD悬架,所述悬架结构为含主副弹簧的四元件并联结构,第一并联元件由主弹簧(1)构成,第二并联元件由副弹簧(2)和惯容器(4)构成,第三并联元件由非对称往复阻尼阻尼器(3)构成。
本发明的一种基于非对称往复阻尼的车辆ISD悬架优化设计方法,包括如下步骤:
1)种群初始化:对遗传算法的种群初始化,即设定悬架参数组数、参数优化代数、悬架参数优化范围,适应度值计算法则及惩罚数的取值规则;
2)对初始种群,即初始悬架参数组,的每一个个体进行一次测量,得到一个状态,获取对应的确定解,计算各个确定解的适应度并记录最优个体及对应的适应度值;
3)判断是否满足进化代数条件,若满足则退出,否则继续计算;
4)对种群的每个个体,即每组悬架参数,进行测量,得到一个状态及相应的确定解,并计算适应度值;
5)通过轮盘赌的方式,完成对种群中个体的选择;
6)在杂交概率为默认值的情况下,在步骤5)中选择的个体中进行随机杂交获得子代群体;
7)在变异概率为默认值的情况下,完成步骤6)获得子代个体的变异;
8)记录子代最优个体和对应的适应度值;
9)迭代次数+1,进入结束条件判断,若满足进化代数则退出,否则返回步骤4);
10)完成上述优化后,再基于优化结果在其他路面输入下进一步验证悬架的优越性能。
进一步,所述适应度值的计算规则步骤如下:
2.1)根据牛顿第二定律,建立包含车身质量、车轮质量两自由度运动的四分之一悬架振动模型;
2.2)建立包含被动悬架“弹簧-阻尼器”二元件并联的1/4车辆悬架振动模型,采用积分白噪声进行输入,通过时域仿真分析,获取该悬架在车速为20m/s的随机路面输入下车身加速度响应均方根值BA
2.3)建立包含本发明提出的一种基于非对称往复阻尼的车辆ISD悬架1/4车辆悬架振动模型,同样采用积分白噪声进行输入,通过时域仿真分析,获取该悬架在车速为20m/s的随机路面输入下车身加速度响应均方根值BA,悬架动行程响应均方根值SWS,轮胎动载荷响应均方根值DTL;
2.4)遗传算法的多目标优化适应度函数计算公式为:
2.5)以车身加速度为例,遗传算法的单目标优化适应度函数计算公式为:
其中,Punishment为惩罚数。
进一步,所述随机路面输入下车身加速度响应均方根值BA
进一步,所述悬架参数组数大小为100,参数优化代数20;
多目标优化适应度函数计算公式中的惩罚数Punishment取值规则为:只要当车身加速度响应均方根值BA,悬架动行程响应均方根值SWS,轮胎动载荷响应均方根值DTL中有一者大于传统被动悬架中的车身加速度响应均方根值BA
遗传算法的单目标优化适应度函数计算公式中的惩罚数Punishment取值规则为:只要当车身加速度响应均方根值BA大于传统被动悬架中的车身加速度响应均方根值BA
进一步,悬架参数优化范围设定为:选定待优化参数为惯质系数b、主弹簧刚度k
进一步,所述步骤10)中,悬架的优越性能验证过程为:分别在脉冲和正弦路面输入下,基于步骤3)得到的参数优化结果,仿真分析得到两种路面下本发明所提出悬架的动力学改善情况。
采取本发明的有益效果是:在考虑车辆ISD悬架系统中往复阻尼非对称性的基础上,提出一种悬架优化设计方法,有效提高悬架动力学模型的准确性,改善悬架的隔振性能。
附图说明
下面结合附图对本发明作进一步说明。
图1是一种基于非对称往复阻尼的车辆ISD悬架结构示意图。
图2是一种基于非对称往复阻尼的车辆ISD悬架结构优化设计方法流程图。
图3是普通被动悬架1/4车辆悬架模型示意图。
图4是一种基于非对称往复阻尼的ISD悬架1/4车辆悬架模型示意图。
图5是脉冲输入下,基于单目标优化结果的车身加速度时域图。
图6是正弦输入下,基于单目标优化结果的车身加速度时域图。
图7是脉冲输入下,基于单目标优化结果的悬架动行程时域图。
图8是正弦输入下,基于单目标优化结果的悬架动行程时域图。
图9是脉冲输入下,基于单目标优化结果的轮胎动载荷时域图。
图10是正弦输入下,基于单目标优化结果的轮胎动载荷时域图。
图中,1.主弹簧,2.副弹簧,3.非对称往复阻尼阻尼器,4.惯容器,5.车身质量,6.车辆悬架,7.车轮质量,8.轮胎等效弹簧。
具体实施方式
下面结合附图和实例对本发明作进一步说明,如图1所示为本发明提出的一种基于非对称往复阻尼的车辆ISD悬架结构示意图,包括主弹簧1、副弹簧2,非对称往复阻尼阻尼器3,惯容器4,其中副弹簧2和惯容器4串联,之后与主弹簧1和非对称往复阻尼阻尼器3并联。
如图2所示是一种基于非对称往复阻尼的车辆ISD悬架结构优化设计方法流程图,普通被动悬架1/4车辆悬架模型中弹簧和阻尼器相并联,图4的一种基于非对称往复阻尼的ISD悬架1/4车辆悬架模型中,副弹簧与惯容器串联,再将其整体与主弹簧和非对称往复阻尼阻尼器并联,由此构成本发明的对照实例。
本发明提出一种基于非对称往复阻尼的车辆ISD悬架优化设计方法,流程图如图2所示,所述的一种基于非对称往复阻尼的车辆ISD悬架及其参数确定方法,其特征在于,悬架参数的确定方法如下:
(1)种群初始化。对遗传算法的种群初始化,设定种群大小(悬架参数组数大小)为100,进化代数(参数优化代数)20。
此处悬架各参数的优化范围设定如下:
式中,待优化参数为惯质系数b、主弹簧刚度k
随机路面输入z
式中,G
根据牛顿第二定律,所述的一种基于非对称往复阻尼的车辆ISD悬架对应的动力学方程为:
式中:m
表1
建立包含传统被动悬架“弹簧-阻尼器”二元件并联的1/4车辆悬架振动模型,其相应的动力学模型为:
其中,m
采用积分白噪声进行输入,通过时域仿真分析,获取该悬架在车速为20m/s的随机路面输入下车身加速度响应均方根值BA
建立包含本发明提出的一种基于非对称往复阻尼的ISD悬架1/4车辆悬架振动模型,其相应的动力学模型为:
其中,m
同样采用积分白噪声进行输入,通过时域仿真分析,获取该悬架在车速为20m/s的随机路面输入下车身加速度响应均方根值BA,悬架动行程响应均方根值SWS,轮胎动载荷响应均方根值DTL。
遗传算法的多目标优化适应度函数计算公式为:
以车身加速度为例,遗传算法的单目标优化适应度函数计算公式为:
上述遗传算法多目标优化适应度函数计算公式中的惩罚数Punishment取值规则为:只要当车身加速度响应均方根值BA,悬架动行程响应均方根值SWS,轮胎动载荷响应均方根值DTL中有一者大于传统被动悬架中的车身加速度响应均方根值BA
(2)对初始种群的每一个个体进行一次测量,得到一个状态,获取对应的确定解,计算各个确定解的适应度并记录最优个体及对应的适应度值。
(3)判断是否满足进化代数条件,若满足则退出,否则继续计算。
(4)对种群的每个个体进行测量,得到一个状态及相应的确定解,并计算适应度值。
(5)通过轮盘赌的方式,完成对种群中个体的选择。
(6)在杂交概率为默认值的情况下,在步骤(5)中选择的个体中进行随机杂交获得子代群体。
(7)在变异概率为默认值的情况下,完成步骤(6)获得子代个体的变异。
(8)记录子代最优个体和对应的适应度值。
(9)迭代次数+1,进入结束条件判断,若满足进化代数则退出,否则返回步骤(4)。
(10)同理,分别在脉冲和正弦路面输入下,基于上述步骤得到的参数优化结果,验证两种路面下本发明所提出悬架的优越动力学性能。
在Matlab/Simulink环境下仿真优化得到基于非对称往复阻尼的车辆ISD悬架的元件参数为:
(1)基于车身加速度的单目标优化:
主弹簧1的刚度为:2860N·m
副弹簧2的刚度为:847N·m
非对称往复阻尼阻尼器3的拉伸阻尼系数为:1149N·s·m
非对称往复阻尼阻尼器3的压缩阻尼系数为:1057N·s·m
惯容器4的惯质系数为:5351kg
(2)基于悬架动行程的单目标优化:
主弹簧1的刚度为:7351N·m
副弹簧2的刚度为:3146N·m
非对称往复阻尼阻尼器3的拉伸阻尼系数为:1797N·s·m
非对称往复阻尼阻尼器3的压缩阻尼系数为:1836N·s·m
惯容器4的惯质系数为:315kg
(3)基于悬架动行程的单目标优化:
主弹簧1的刚度为:11519N·m
副弹簧2的刚度为:4072N·m
非对称往复阻尼阻尼器3的拉伸阻尼系数为:1733N·s·m
非对称往复阻尼阻尼器3的压缩阻尼系数为:1822N·s·m
惯容器4的惯质系数为:24kg
(4)多目标优化:
主弹簧1的刚度为:4446N·m
副弹簧2的刚度为:3948N·m
非对称往复阻尼阻尼器3的拉伸阻尼系数为:17027N·s·m
非对称往复阻尼阻尼器3的压缩阻尼系数为:1686N·s·m
惯容器4的惯质系数为:1562kg
通过多种工况下的仿真分析,运用本发明所提出的优选方法,所选的一种基于非对称往复阻尼的车辆ISD悬架在随机路面输入下的低频减振性能十分优越,且具有很大的动力学性能提升空间。脉冲路面输入下,该悬架各性能指标响应时间和超调量均得到明显改善;正弦路面输入下,非对称往复阻尼的ISD悬架的响应峰值抑制效果较优于对称往复阻尼ISD悬架,展现出优秀的稳定性和实用性。
所述实施案例为本发明优选的实施方式,但本发明并不限于上述实施方式,在不背离本发明的实质内容的情况下,本领域技术人员能够做出的任何显而易见的改进、替换或变型均属于本发明的保护范围。
- 一种基于非对称往复阻尼的车辆ISD悬架结构及优化设计方法
- 一种基于RBF滑模变结构控制的车辆ISD悬架主动控制方法