一种垃圾分类方法及智能垃圾桶
文献发布时间:2023-06-19 12:02:28
技术领域
本发明涉及垃圾分类技术领域,尤其是涉及一种垃圾分类方法及智能垃圾桶。
背景技术
随着经济的发展,人民的生活水平也逐渐提高,随之产生的垃圾产量如喷发式地剧增。垃圾分类回收问题已日益严峻,垃圾分类回收已逐渐成为居民日常生活中不可或缺的一环。然而,目前的垃圾分类效果并不明显,主要包括两方面的原因,一方面是国内缺乏对垃圾分类回收的宣传和普及教育;另一方面是人们对垃圾分类的知识不够完备。因此,如何有效地对垃圾进行分类,以提高垃圾的利用率以及降低垃圾的污染,显得尤为重要。现有的垃圾分类方法仅能识别固定形状的垃圾,无法全面识别生活中的多种垃圾,导致垃圾分类的效果较差。
发明内容
本发明提供一种垃圾分类方法及智能垃圾桶,以解决现有的垃圾分类方法仅能识别固定形状的垃圾,无法全面识别生活中的多种垃圾,导致垃圾分类的效果较差的技术问题。
本发明的第一实施例提供了一种垃圾分类方法,包括:
获取基础数据集,并对所述基础数据集进行预处理得到预处理数据集;
选取预训练模型进行迁移学习,将所述预处理数据集和垃圾分类标签输入至所述预训练模型中进行训练,构建垃圾训练模型;
采集待分类垃圾的图像数据,并将所述图像数据输入至所述垃圾训练模型中进行特征提取,得到所述待分类垃圾对应的垃圾特征;
将所述垃圾特征与所述垃圾训练模型中的特征进行匹配,根据匹配结果得到所述待分类垃圾的分类标签,将所述分类标签作为所述待分类垃圾的分类结果。
进一步的,所述获取基础数据集,并对所述基础数据集进行预处理得到预处理数据集,具体为:
获取基础数据集,采用数据增广方法对所述基础数据集进行预处理得到预处理数据集。
进一步的,采用数据增广方法对所述基础数据集进行预处理得到预处理数据集,包括:
对所述基础数据集进行水平翻转、垂直翻转、高斯噪声和高斯模糊操作扩充所述基础数据集;以及通过引入外部数据扩充所述基础数据集。
进一步的,所述选取预训练模型进行迁移学习,将所述预处理数据集和垃圾分类标签输入至所述预训练模型中进行训练,构建垃圾训练模型,具体为:
选取卷积神经网络作为预训练模型,将CBAM注意力机制模块添加至所述预训练模型的首层卷积层,在所述预训练模型的全连接层添加Dropout层,并采用交叉熵损失函数作为损失函数,以及采用SGD作为优化函数;
将所述预处理数据集和垃圾分类标签输入至所述预训练模型中进行微调训练,构建垃圾训练模型。
进一步的,所述垃圾分类方法还包括:在获得所述待分类垃圾的分类结果后,通过语音播放所述分类结果,在预设时间内没有检测到用户手动输入的分类指令时,控制所述分类结果对应的垃圾收集装置的阀门打开。
进一步的,所述分类标签包括可回收垃圾、不可回收垃圾和其他垃圾。
本发明的第二实施例提供了一种智能垃圾桶,包括外壳、盖板、分类识别腔和若干个垃圾收集装置,所述盖板设置于所述外壳的顶部,所述盖板下方设置有用于对待分类垃圾进行分类识别的分类识别腔,所述分类识别腔的底部设置有通过传输管道连通至若干个所述垃圾收集装置的内门;
所述分类识别腔设置有图像采集模块和垃圾分类装置,所述图像采集模块用于采集所述分类识别腔的待分类垃圾的图像数据,所述垃圾分类装置用于执行如上述的垃圾分类方法。
进一步的,所述智能垃圾桶还包括设置于所述盖板上的压力传感器,所述压力传感器用于检测所述盖板是否存在超过阈值大小的压力值。
进一步的,所述垃圾分类装置还用于,在所述压力传感器检测到的压力值超过阈值大小时,控制所述盖板打开。
进一步的,所述智能垃圾桶还包括设置在每一所述垃圾收集装置上的红外探测器,所述红外探测器用于通过红外光探测每一所述垃圾收集装置的垃圾容量是否达到预设值。
本发明实施例在获取到大量的预处理数据后,选取预训练模型进行迁移学习构建垃圾训练模型,并通过垃圾训练模型对待分类垃圾进行特征提取以及匹配,能够全面识别生活中的多种垃圾,从而能够有效提高垃圾分类的效果。
附图说明
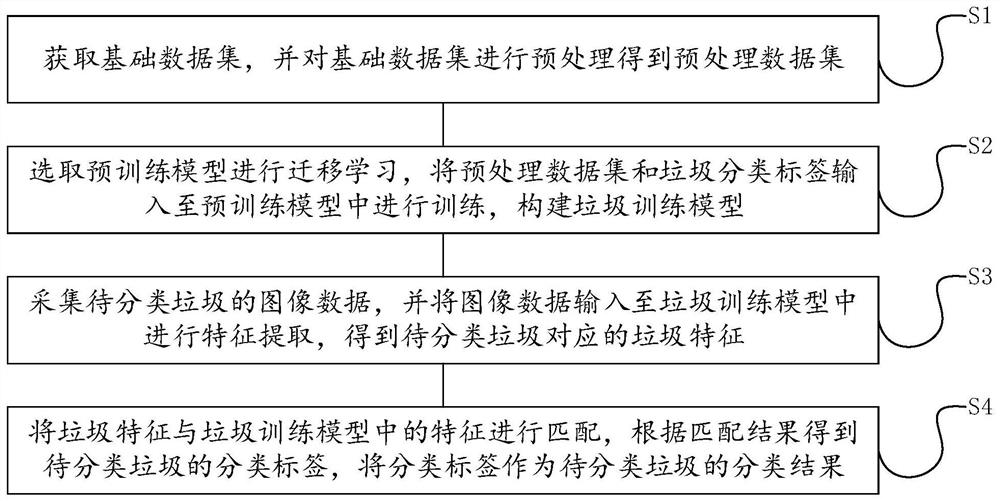
图1是本发明实施例提供的一种垃圾分类方法的流程示意图;
图2是本发明实施例提供的一种智能垃圾桶的结构示意图。
图3是本发明实施例提供的一种智能垃圾桶的另一结构示意图。
具体实施方式
下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
在本申请的描述中,需要理解的是,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本申请的描述中,除非另有说明,“多个”的含义是两个或两个以上。
在本申请的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本申请中的具体含义。
请参阅图1,在本发明的第一实施例中,本发明的第一实施例提供了一种垃圾分类方法,包括:
S1、获取基础数据集,并对基础数据集进行预处理得到预处理数据集;
在本发明实施例中,基础数据集均为真实的、高质量的数据资源,包括了日程生活中常见的40种垃圾图片数据集。需要说明的是,每一垃圾均对应一种分类标签,分类标签包括可回收垃圾、不可回收垃圾和其他垃圾。具体的,将废弃的玻璃、织物、家具以及电器电子产品等适合回收同时可循环利用的废弃物归为可回收垃圾;将废电池、废药品、废灯管等对人们身体健康和自然环境有害而且应当专门处理的废弃物归为不可回收垃圾;除以上二类垃圾之外的废弃物都归为其他垃圾。
S2、选取预训练模型进行迁移学习,将预处理数据集和垃圾分类标签输入至预训练模型中进行训练,构建垃圾训练模型;
S3、采集待分类垃圾的图像数据,并将图像数据输入至垃圾训练模型中进行特征提取,得到待分类垃圾对应的垃圾特征;
S4、将垃圾特征与垃圾训练模型中的特征进行匹配,根据匹配结果得到待分类垃圾的分类标签,将分类标签作为待分类垃圾的分类结果。
作为本发明实施例的一种具体实施方式,获取基础数据集,并对基础数据集进行预处理得到预处理数据集,具体为:
获取基础数据集,采用数据增广方法对基础数据集进行预处理得到预处理数据集。
示例性的,采用数据增广方法对基础数据集进行预处理得到预处理数据集,包括:对基础数据集进行水平翻转、垂直翻转、高斯噪声和高斯模糊操作扩充基础数据集;以及通过引入外部数据扩充基础数据集。具体地,通过引入外部数据扩充基础数据集包括数据爬取和数据筛选两个步骤,其中数据爬取是通过网络爬虫技术来实现的,网络爬虫的流程为:首先向远程服务器端发送请求,获取目标网页的HTML文件;然后跟踪该HTML文件以获取对应的文件数据。由于基础数据集中类别数量不均衡,本发明实施例使用网络爬虫方式从百度图库对基础数据集中数量较少的类别进行数据扩充,首先输入需要爬取的图片名称关键字,然后输入想要爬取图片的数量以及存放的文件夹之后,进行图片爬取。
本发明实施例通过数据增广对基础数据集进行扩充,避免因为基础数据集太少导致在模型训练过程可能出现的过拟合现象,从而提高模型泛化能力,使得垃圾分类达到更好的效果。
作为本发明实施例的一种具体实施方式,选取预训练模型进行迁移学习,将预处理数据集和垃圾分类标签输入至预训练模型中进行训练,构建垃圾训练模型,具体为:
选取卷积神经网络作为预训练模型,将CBAM注意力机制模块添加至预训练模型的首层卷积层,在预训练模型的全连接层添加Dropout层,并采用交叉熵损失函数作为损失函数,以及采用SGD作为优化函数;
将预处理数据集和垃圾分类标签输入至预训练模型中进行微调训练,构建垃圾训练模型。
在本发明实施例中,采用ResNext101_32x16d_WSL网络作为基本的网络结构进行迁移学习,将CBAM注意力机制模块添加在首层卷积层,以增强图像特征表征能力,并关注图像的重要特征抑制不必要的特征,固定除全连接层之外的其他层的权重。本发明实施例在预训练模型的全连接层添加Dropout层,并采用交叉熵损失函数作为损失函数,以及采用SGD作为优化函数,能够有效降低过拟合。本发明实施例基于迁移学习对待分类垃圾的图像数据进行分类,保持网络中其他参数不变,只修改预训练模型的最后几层,最后几层的参数在新数据集上重新训练得到。其他层的参数保持不变,作为特征提取器,之后再使用较小的学习率训练整个网络,不仅能够有效减少计算时间以及计算所需资源,还能够有效降低过拟合发生的可能性,有效提高分类的效果。
作为本发明实施例的一种具体实施方式,垃圾分类方法还包括:在获得待分类垃圾的分类结果后,通过语音播放分类结果,在预设时间内没有检测到用户手动输入的分类指令时,控制分类结果对应的垃圾收集装置的阀门打开。
在本发明实施例中,在获得待分类垃圾的分类结果后,将识别到的分类结果通过语音播放出来,用户在听取分类结果后,若识别不对,可以在语音信息播放的10秒时间内通过手动选择正确的分类结果。执行该垃圾分类方法的内部控制器获取用户的手动选择结果,并将该结果上传至服务器更新服务器的数据,以实现数据共享。
实施本发明实施例,具有以下有益效果:
本发明实施例在获取到大量的预处理数据后,选取预训练模型进行迁移学习构建垃圾训练模型,并通过垃圾训练模型对待分类垃圾进行特征提取以及匹配,能够全面识别生活中的多种垃圾,从而能够有效提高垃圾分类的效果。
请参阅图2-3,本发明的第二实施例提供了图2所示的一种智能垃圾桶,包括外壳、盖板1、分类识别腔2和若干个垃圾收集装置,盖板1设置于外壳的顶部,盖板1下方设置有用于对待分类垃圾进行分类识别的分类识别腔2,分类识别腔2的底部设置有通过传输管道连通至若干个垃圾收集装置的内门3;
分类识别腔2设置有图像采集模块和垃圾分类装置,图像采集模块用于采集分类识别腔2的待分类垃圾的图像数据,垃圾分类装置用于执行如上述的垃圾分类方法。
在本发明实施例中,在垃圾分类装置得到垃圾分类结果后,根据该分类结果将待分类垃圾传输至对应的垃圾收集装置中,其中垃圾收集装置包括可回收垃圾收集装置5、不可回收垃圾收集装置4和其他垃圾收集装置6。
可选地,图像采集模块包括X光灯管8和摄像头7。
作为本发明实施例的一种具体实施方式,智能垃圾桶还包括设置于盖板1上的压力传感器,压力传感器用于检测盖板1是否存在超过阈值大小的压力值。作为本发明实施例的一种具体实施方式,垃圾分类装置还用于,在压力传感器检测到的压力值超过阈值大小时,控制盖板1打开。
在检测到盖板1上方投放有垃圾后,控制盖板1打开使待分类垃圾滑落至分类识别腔2中。
作为本发明实施例的一种具体实施方式,智能垃圾桶还包括设置在每一垃圾收集装置上的红外探测器,红外探测器用于通过红外光探测每一垃圾收集装置的垃圾容量是否达到预设值。
在本发明实施例中,每一垃圾收集装置的上方均设置有一个红外探测器,通过红外探测器能够准确判断垃圾收集装置的容量是否已满,从而能够及时对垃圾收集装置的垃圾进行清理,从而提高垃圾分类的效率。
示例性地,本发明实施例的智能垃圾桶通过设置太阳能电池板获取运行所需的电能,在外部电源异常时能够保证正常工作。
请参阅图3,为本发明实施例提供的一种智能垃圾桶的另一结构示意图。
实施本发明实施例,具有以下有益效果:
本发明实施例在获取到大量的预处理数据后,选取预训练模型进行迁移学习构建垃圾训练模型,并通过垃圾训练模型对待分类垃圾进行特征提取以及匹配,能够全面识别生活中的多种垃圾,从而能够有效提高垃圾分类的效果。
以上是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
- 智能垃圾桶及智能垃圾桶的智能分类方法
- 一种垃圾分类方法及智能垃圾桶