一种智能粒子滤波方法
文献发布时间:2023-06-19 12:07:15
技术领域
本发明涉及信号处理与目标追踪领域,特别涉及一种智能粒子滤波方法。
背景技术
系统状态估计是从系统噪声测量中推断出系统内部隐状态的方法,其典型代表就是贝叶斯滤波。卡尔曼滤波和粒子滤波(Particle Filter,PF)是在贝叶斯滤波的基础上发展出来的状态估计技术。对于线性、高斯系统,卡尔曼滤波具有良好估计性能;对于非高斯、非线性系统,卡尔曼滤波易发散,而粒子滤波估计性能更具优势。
粒子滤波算法广泛运用于机器人、通信与信号处理、目标追踪及目标定位等领域。基本思想是用一组样本(或称粒子)来近似表示系统的后验概率分布,然后使用这一近似表示来估计非线性系统的状态。由于粒子不断更新,不可避免会出现退化现象。迭代多次后,大部分粒子的权值极小,这些粒子由于退化的缘故,继续迭代下去将消耗大量的计算资源,并影响最终的估计结果。因此,通过引用有效采样数量和重采样方法,舍弃权值较小的粒子,并将权值较大粒子进行繁殖,衍生出更多等权值的粒子。改进的重采样方法主要有分区重采样、并行重采样、系统重采样、残差重采样、正则重采样等,但上述重采样方法均未能有效解决粒子退化现象。
在传统粒子滤波基础上改进的粒子滤波虽在特定场景能够提高粒子滤波性能,但粒子退化现象仍未能有效解决。而遗传重采样算法为解决粒子匮乏问题提供了一条有效的研究思路。近年来,有学者提出一种智能粒子滤波算法(Intelligent Particle Filter,IPF),该算法在重采样过程中结合遗传算法,将粒子按权值分为大、小两个群体,对权值较小的群体进行交叉、变异,使其进化成权值较大的粒子,有效解决粒子退化的影响,并在多种模型中估计效果显著高于PF。IPF有效改善了粒子后验概率分布不均的情况,并为粒子滤波智能化的研究提供了新方向。然而,在智能粒子滤波算法中,遗传重采样粒子完全根据变异概率随机变异。在低权值粒子中,粒子权值分布并非均匀,粒子权值越低,该粒子越容易被淘汰,从而使得粒子多样性在多次迭代以后受到损失。
发明内容
为了克服现有技术存在的不足,本发明提供一种智能粒子滤波方法,在交叉和变异算子中增加自适应处理,进一步提高粒子利用率并降低粒子退化影响。具体技术方案如下:
本发明提供了一种智能粒子滤波方法,将数据粒子分为高权值粒子、低权值粒子和底层粒子,使得所述的高权值粒子、低权值粒子和底层粒子按照自适应变异策略变异并输出变异结果,其中,所述底层粒子的自适应变异参数大于预设的变异概率,所述低权值粒子的自适应变异参数小于预设的变异概率、且其变异系数小于预设的变异概率,所述高权值粒子的自适应变异参数小于预设的变异概率、且其变异系数大于预设的变异概率。
进一步地,所述自适应变异策略为
其中,
进一步地,所述数据粒子由初始粒子依次经过分离处理和交叉处理获得,所述分离处理包括:将所述初始粒子根据预设的权重阈值分为初始高权粒子和初始低权粒子;所述交叉处理包括:输入交叉系数,由所述初始高权粒子和所述初始低权粒子线性生成交叉低权粒子。
进一步地,所述自适应变异参数为
其中,
其中,
进一步地,所述交叉低权粒子按以下方式生成:
其中a∈[0,1]为随机选取的粒子交叉系数,
为初始低权粒子。
进一步地,所述交叉系数大于或等于0,且所述交叉系数小于或等于1。
进一步地,对变异后的底层粒子进行权值更新,并判断更新后的权值是否落入预设范围内,若是则输出变异结果,否则对所述底层粒子进行分离处理、交叉处理、按照自适应变异参数变异中的一种或多种操作。
进一步地,在对所述初始粒子进行分离处理前,计算所述初始粒子的权值。
进一步地,在所述高权值粒子的变异中不进行交叉处理。
进一步地,所述变异概率为0.8~0.9。
本发明的技术方案带来的有益效果包括:
a.解决粒子退化的问题,降低粒子退化影响;
b.提高粒子多样性;
c.提高粒子利用率。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1是现有技术的智能粒子滤波方法与本发明实施例提供的智能粒子滤波方法的对比示意图;
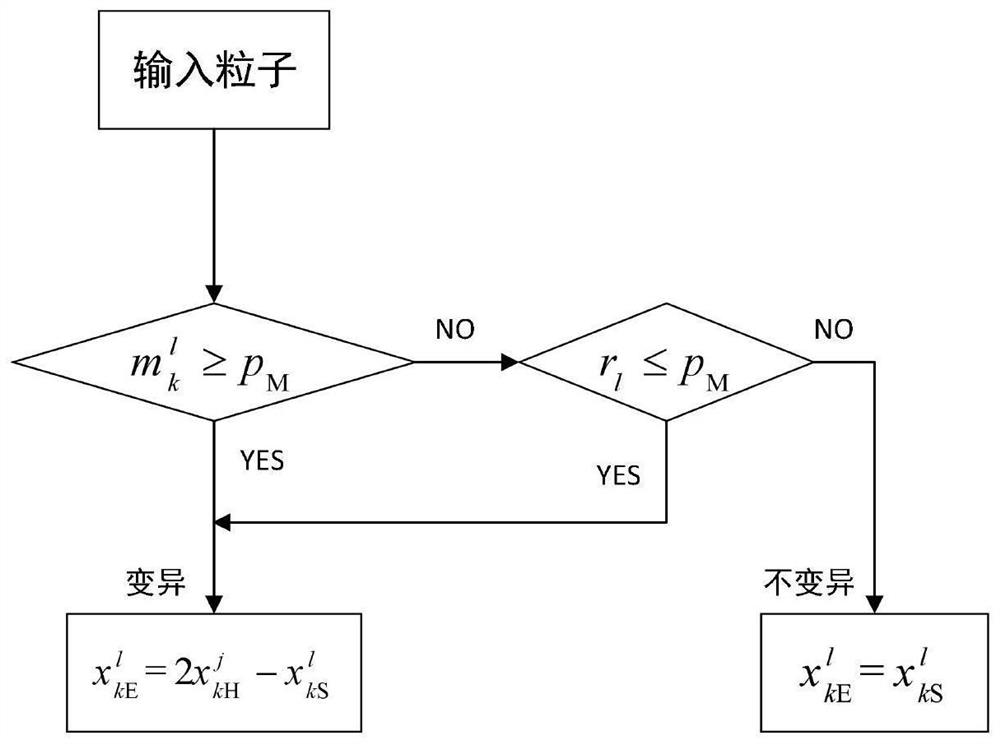
图2是本发明实施例中的IIPF中的自适应变异策略示意图;
图3是本发明实施例中提供的智能粒子滤波算法示意图;
图4是本发明实施例中的PF和EKF状态的估计图;
图5是本发明实施例中的IPF和IIPF状态的估计图;
图6是本发明实施例中的k=11、N=500时的粒子分布示意图;
图7是本发明实施例中的多维仿真模型高度误差的第一示意图;
图8是本发明实施例中的多维仿真模型速度误差的第二示意图;
图9是本发明实施例中的非高斯随机噪声和乘性噪声下EKF估计图。
具体实施方式
为了使本技术领域的人员更好地理解本发明方案,更清楚地了解本发明的目的、技术方案及其优点,以下结合具体实施例并参照附图对本发明实施例中的技术方案进行清楚、完整的描述。显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。除此,本发明的说明书和权利要求书中的术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、装置、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
现有技术中,智能粒子滤波算法基本算法如下:
a.分离
b.交叉
c.变异
而在本发明的一个实施例中,提供了一种基于阵列重构的多声源定位方法,包括以下步骤:
步骤(1):分离和交叉,
a.分离
其中W
b.交叉
c.变异
步骤(2):改进智能粒子滤波算法中分离、交叉算子与智能粒子滤波中的分离、交叉算子相同,通过式(1)和(3)得到分离、交叉后的粒子
自适应变异参数为:
其中,
步骤(3):改进智能粒子滤波中粒子根据其权值大小自行分为高权值粒子、低权值粒子和底层粒子(也称底层低权值粒子),高权值粒子保留其状态信息;低权值粒子将根据变异概率随机变异;底层低权值粒子作为低权值粒子中的特殊群体,具有优先变异的资格;底层低权值粒子的变异策略是不根据变异概率变异,而是直接变异。改进智能粒子滤波的自适应变异策略如式(7)所示;
其中,
改进后的变异过程,能够使得权值非常低的粒子(底层粒子)变异概率大幅度增加,有效提高底层粒子利用率,以降低粒子贫乏的影响,提高粒子滤波性能。改进的智能粒子滤波算法如图3所示。
图1形象地对比了现有技术的智能粒子滤波方法和本实施例的智能粒子滤波方法,其中,左边的图形对应现有技术,右边的图形对应本实施例的方法,可以看到较之现有技术,本实施例的方法保留了更多的低权值粒子。
下面通过具体仿真实例对本发明的粒子滤波性能进行详细说明:
1.高斯随机噪声下的多维仿真模型
为了更好地测试提出的粒子滤波算法的性能,另外引入一种多维仿真模型。该模型为物体自高空坠入大气层。如下式(8)和式(9):
其中,x
表1多维模型参数
选择变异概率p
为检测智能粒子滤波粒子多样性,将同一组父代粒子分别进行IPF和IIPF,获取新的粒子状态分布,并通过粒子分布情况判定多样性。在模型二中,系统在 11s-13s时,非线性程度较高,选择第11s来分析粒子的状态。图6显示了11s时获取的新粒子的状态分布。从图中结果对比可知,IIPF的粒子后验概率分布区域的粒子分布更为均匀,充分说明了本文提出的重采样策略可有效提升粒子滤波的性能。
系统跟踪误差如下表2和图7、图8所示,由于PF误差过大,图7和图8 中省略了PF。在图7和图8中,IIPF性能皆优于IPF、EKF和PF,IIPF高度和速度在均方根误差和平均误差上均低于其他算法。其中,高度均方根误差较IPF 降低了11.5%,速度均方根误差较IPF降低了6.8%;高度平均误差较IPF降低了 7.6%,速度平均误差较IPF降低了4.4%。
表2多维模型均方根误差与平均误差表
2.非高斯随机噪声和乘性噪声下的多维仿真模型
为进一步验证IIPF性能,将多维仿真模型中的系统随机高斯噪声分别改为非高斯随机噪声和乘性噪声,其余参数设置不变。其中乘性系统噪声如式(10)所示。
其中,μ′
实验结果表明,在非高斯随机噪声下的IIPF和IPF均能良好的跟踪性能。如图9所示,EKF在两个场景中均偏离实际轨迹。而IPF和IIPF在非高斯随机噪声系统和乘性噪声系统中优势明显,且IIPF较IPF依旧保持10%以上的性能优势。表3所示为IPF和IIPF在非高斯随机噪声和乘性噪声系统中的均方根误差,由于 PF和EKF误差过大,未进行统计。结果表明,IIPF在高度和速度均方根误差上性能均优于IPF,在高度均方根误差上,IIPF均有超过10%的性能优势;在速度方面,均方根误差也都小于IPF。
通过上述两组仿真实验验证出本实施例的改进的智能粒子滤波性能优于现有技术的智能粒子滤波和其他粒子滤波。
表3非高斯随机噪声和乘性噪声下多维仿真模型的均方根误差
智能粒子滤波通过借鉴遗传算法思想能够减轻粒子退化现象。在基于遗传算法的智能粒子滤波基础上,提出了对低权值粒子的自适应处理策略。在对粒子进行分离、交叉后,优化遗传算子,对低权值粒子进行自适应处理。低权值粒子根据权值大小自行判断是否为底层粒子;底层粒子将直接进行变异,其余低权值粒子将根据变异概率随机变异。仿真结果表明,改进的智能粒子滤波性能优于智能粒子滤波、一般粒子滤波算法和拓展卡尔曼滤波。在一维仿真实验中,改进的智能粒子滤波误差较一般粒子滤波算法和智能粒子滤波分别降低了10.5%和8.5%,且具有更好的收敛性;在多维仿真实验中,改进的智能粒子滤波较智能粒子滤波在高度均方根误差和平均误差上分别降低了8.5%和7.5%,在速度均方根误差和平均误差上分别降低了11.5%和7.6%;在乘性噪声和非高斯随机噪声中,改进的智能粒子滤波依旧有10%以上的性能优势。
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种智能粒子滤波方法
- 一种基于水螅虫海龟觅食混合算法的粒子滤波方法