一种车用环形时滞反馈控制动力吸振器
文献发布时间:2023-06-19 12:14:58
技术领域
本发明涉及一种车用环形时滞反馈控制动力吸振器,属于减振技术领域。
背景技术
悬架性能决定着车辆行驶平顺性和操纵稳定性的好坏。车辆行驶过程中,由于路面的不平度导致车轮产生振动,车轮的振动将会导致车辆操纵稳定性的恶化,同时车轮的振动能量会通过悬架传递给车身导致行驶平顺性的恶化,现有的汽车悬架系统是将车辆的振动能量部分消耗在悬架中,但还会有大量的能量传递到车身产生振动。由于被动悬架本身的结构特点,车辆的行驶平顺性和操纵稳定性是一对矛盾体。
人们为了提高车辆的行驶平顺性,研发了各种各样的主动控制悬架。主动悬架在控制过程中,从信号的采集、计算机的分析处理到作动器的工作均需要一定的时间,这就给系统不可避免的时滞现象。传统观点把时滞现象看作不利因素,会给系统带来稳定性的丧失,甚至分岔混沌现象的产生。
随着研究的深入,人们发现选取恰当的时滞量作为主动控制项,进行减振控制则会有较好的减振效果。车用环形时滞反馈控制动力吸振器是将能量吸收转移,构思来源于吸振器和时滞反馈控制在车辆减振中的应用,在车轮内部增加时滞反馈控制动力吸振器结构,将车轮的振动能量吸收,不仅有效抑制车轮振动,同时减少了能量向车身的传递,解决了传统悬架行驶平顺性和操纵稳定性这一对矛盾性难题。
发明内容
本发明的目的是提出一种车用环形时滞控制动力吸振器,吸收车轮的振动能量,使车轮和车身振幅减小,提高了车辆的操纵稳定性和行驶平顺性。
本发明车用环形时滞反馈控制动力吸振器,包括轮毂轴、摆臂支撑架、球头、上摆臂、下摆臂、减振器,其特征在于:
它还包括弹簧、阻尼器、时滞可控作动器、环形吸能质量块、位移传感器、电控单元。
所述阻尼器一端与环形吸能质量块的上安装底座固定安装,另一端与摆臂支撑架的上安装底座固定安装;弹簧安装嵌套在阻尼器的外周,与阻尼器留有一定的间隙,一端与环形吸能质量块压紧,另一端与摆臂支撑架压紧;时滞可控作动器一端与环形吸能质量块的下安装底座固定安装,另一端与摆臂支撑架的下安装底座固定安装,由此环形吸能质量块通过阻尼器和作动器安装在摆臂支撑架上;阻尼器的纵向轴线与弹簧的纵向轴线、作动器的纵向轴线在同一直线上;位移传感器固定安装在摆臂支撑架的侧面;电控单元固定安装在摆臂支撑架的侧面,位于位移传感器下部。
所述环形吸能质量块环形半径小于轮毂半径,位与轮毂内,与轮毂轴同轴心,通过阻尼器和时滞可控作动器的导向作用,与车轮的振动方向保持平行,且环形吸能质量块的振动位移行程应介于轮毂和摆臂支撑架上的球头之间。
所述摆臂支撑架上端固定装有两个球头,下端固定装有一个球头;上摆臂共有四处连接点,上摆臂下端两连接点分别于上摆臂两球头铰接,上摆臂上端两连接点其中一个与车身铰接,另一个先与减振器一端铰接,然后减振器另一端与车身铰接;下摆臂共有三处连接点,下端连接点与摆臂支撑架下端的球头进行铰接,剩余两连接点分别与车身铰接,由此摆臂支撑架被铰接在车身上。
所述轮毂轴与轮毂固定连接,摆臂支撑架通孔与轮毂轴之间通过轴承连接在一起。
所述电控单元的输入端连接位移传感器,电控单元的输出端连接时滞可控作动器。
车用环形时滞反馈控制动力吸振器的工作原理:路面激励对轮胎产生冲击,经过轮胎的缓冲,剩余的冲击力将继续传递到轮毂,轮毂通过轮毂轴把冲击力传到摆臂支撑架;摆臂支撑架的振动量可由位移传感器检测并通过电控单元实时控制作动器的反馈增益和时滞量,改变时滞动力吸振器的固有频率,车轮的振动能量被吸收到环形吸能质量块上,减小了车轮的振动位移量;车轮振动能量的减小,会减少通过上摆臂和下摆臂把车轮的振动能量传递给车身,本发明同时减小了车轮和车身的振动,提高了车辆的行驶平顺性和操纵稳定性。
本发明有益效果如下:
(1)本发明所述的一种车用环形时滞控制动力吸振器,结构简单,安装方便。
(2)本发明所述的一种车用环形时滞控制动力吸振器,可吸收车轮因路面不平度而产生的振动能量从而抑制车轮的振动,因车轮的振动减小从而使得振动能量向车身的传递能量减小,克服了车辆操纵稳定性和行驶平顺性之间的矛盾,同时提高了车辆操纵稳定性和行驶平顺性;
(3)本发明所述的一种车用环形时滞控制动力吸振器,其电控单元可根据位移传感器测得的车轮振动量,实时调节反馈增益系数和时滞量,从而改变吸振器的固有频率,使其在较宽的工作频带,有较好的吸振效果。
附图说明
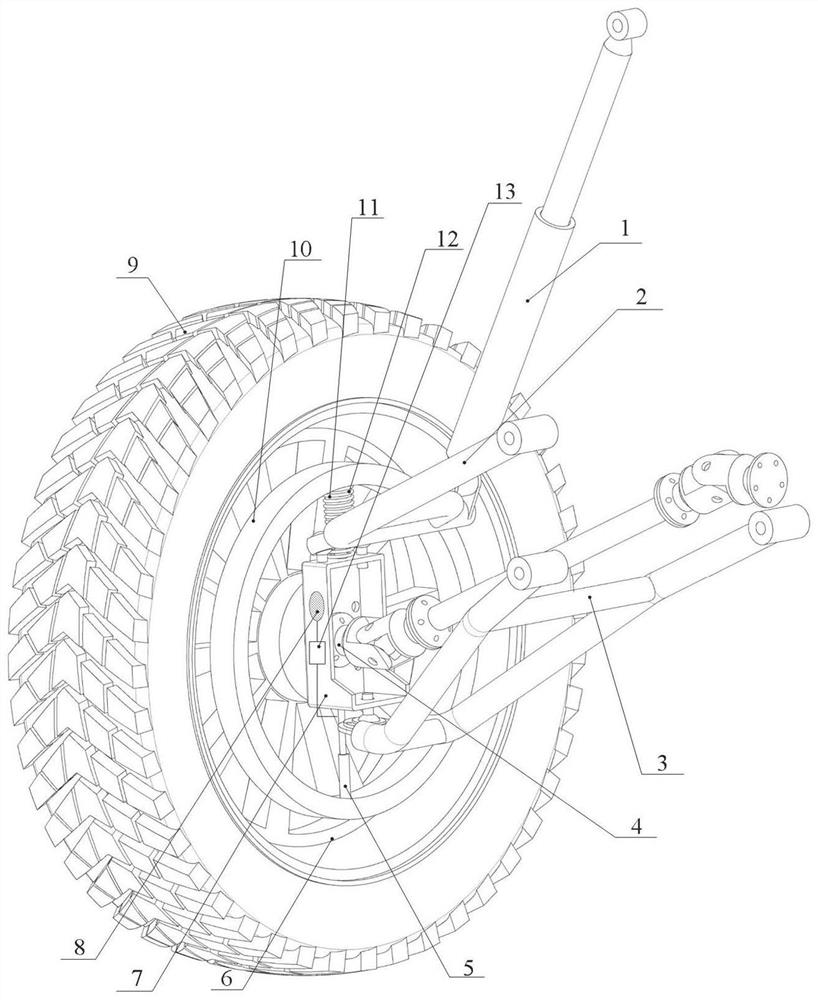
图1是本发明一种车用环形时滞控制动力吸振器安装结构示意图;
图2是本发明一种车用环形时滞控制动力吸振器结构图;
图3是本发明一种车用环形时滞控制动力吸振器中摆臂支撑架结构示意图;
图4是本发明一种车用环形时滞控制动力吸振器中环形吸能质量块结构示意图;
图5是本发明一种车用环形时滞控制动力吸振器中上摆臂结构示意图;
图6是本发明一种车用环形时滞控制动力吸振器中下摆臂结构示意图;
图中:1、减振器;2、上摆臂;3、下摆臂;4、轮毂轴;5、时滞可控作动器;6、轮毂;7、摆臂支撑架;7a、摆臂支撑架上安装底座;7b、摆臂支撑架下安装底座;7c、摆臂支撑架通孔;8、位移传感器;9、轮胎;10、环形吸能质量块;11、弹簧;12、阻尼器;13、电控单元;14a、14b、14c、球头。
具体实施方式
下面结合附图对本发明进行进一步的说明。
本发明车用环形时滞反馈控制动力吸振器,包括轮毂轴4、摆臂支撑架7、球头14a、14b、14c、上摆臂2、下摆臂3、减振器1其特征在于:
它还包括弹簧11、阻尼器12、时滞可控作动器5、环形吸能质量块10、位移传感器8、电控单元13。
所述阻尼器12一端与环形吸能质量块10的上安装底座10a固定安装,另一端与摆臂支撑架7的上安装底座7a固定安装;弹簧11安装嵌套在阻尼器12的外周,与阻尼器12留有一定的间隙,一端与环形吸能质量块10压紧,另一端与摆臂支撑架7压紧;时滞可控作动器5一端与环形吸能质量块10的下安装底座 10b固定安装,另一端与摆臂支撑架7的下安装底座7b固定安装,由此环形吸能质量块10通过阻尼器12和作动器5安装在摆臂支撑架7上;阻尼器12的纵向轴线与弹簧11的纵向轴线、作动器5的纵向轴线在同一直线上;位移传感器8固定安装在摆臂支撑架7的侧面;电控单元13固定安装在摆臂支撑架7的侧面,位于位移传感器8下部。
所述环形吸能质量块10环形半径小于轮毂6半径,位与轮毂6内,与轮毂轴4同轴心,通过阻尼器12和时滞可控作动器5的导向作用,与车轮的振动方向保持平行,且环形吸能质量块10的振动位移行程应介于轮毂6和摆臂支撑架上的球头16a、16b、16c之间。
所述摆臂支撑架上端固定装有两个球头14a、14b,下端固定装有一个球头 14c;上摆臂共有四处连接点,上摆臂连接点2a和球头14a铰接,上摆臂连接点 2b和球头14b铰接,上摆臂连接点2c和车身铰接,上摆臂连接点2d先与减振器1一端铰接,然后减振器1另一端与车身铰接;下摆臂共有三处连接点,连接点3a与摆臂支撑架的球头14c进行铰接,连接点3b与车身铰接,连接点3c与车身铰接,由此摆臂支撑架7被铰接在车身上。
所述轮毂轴与轮毂固定连接,摆臂支撑架通孔7c与轮毂轴4之间通过轴承连接在一起。
所述电控单元13的输入端连接位移传感器8,电控单元13的输出端连接时滞可控作动器5。
路面激励对轮胎9产生冲击,经过轮胎9的缓冲,剩余的冲击力将继续传递到轮毂6,轮毂6通过轮毂轴4把冲击力传到摆臂支撑架7。摆臂支撑架7的振动量可由位移传感器8检测并通过电控单元13实时控制作动器5的反馈增益和时滞量,将时滞反馈控制动力吸振器的固有频率调节到与车轮的振动频率一致,此时车轮的振动能量被吸收到环形吸能质量块10上,环形吸能质量块在阻尼器 12纵向轴线的方向上振动,振动行程介于轮毂6和摆臂支撑架上的球头16a、16b、 16c之间。此过程减小了车轮的振动位移量,使车轮振动能量减小,进而减少车轮通过上摆臂2和下摆臂3把车轮振动能量传递给车身;本发明同时减小了车轮和车身的振动,提高了车辆的行驶平顺性和操纵稳定性。
尽管上面结合附图对本发明的实施方式加以描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,并不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离发明宗旨和权利要求所保护的范围情况下,还可以做出很多形式,这些均属于本发明的保护范围之内。
- 一种车用环形时滞反馈控制动力吸振器
- 一种时滞交通流模型的时滞反馈控制的方法