一种全自动物料抓取调节装置
文献发布时间:2023-06-19 12:14:58
技术领域
本申请涉及一种全自动物料抓取调节装置。
背景技术
在自动化生产中,由于产品的形状及结构因素,导致半成品产品放入搬运料盘/载具的放置过程、产品在被放入模具内再加工的放置过程及最终成品的装盘过程,都需要考虑产品与产品之间的间距、产品的正反面及相邻产品之间的角度关系等。目的是为了搬运时各料盘能够高密度收纳产品,同时需要确保产品不会损坏。
现有技术中的半成品放置在载具上的相对位置关系和加工后的成品放在成品料盘上的相对位置关系往往是不同的。因此在这些过程中,就需要对产品的角度、正反面等做出调整。此类调整过程一般只能通过人力来实现。
因此有必要设计一种全自动物料抓取调节装置,以解决上述问题。
发明内容
本申请的目的在于提供一种全自动物料抓取调节装置,能够简单且便捷的调整物料角度和位置。
本申请的目的通过以下技术方案来实现:
一种全自动物料抓取调节装置,用于结合至机械手或多轴移动平台或自动化设备,包括基座、旋转结合于所述基座上的夹取组件、第一驱动装置及连动组件,所述第一驱动装置结合于基座,所述第一驱动装置驱动连动组件进而连动夹取组件运动,所述连动组件上结合有驱动部,所述夹取组件上形成有滑动槽,所述驱动部对应插入滑动槽,所述驱动部能够被第一驱动装置驱动而相对基座实现沿直线段A移动,所述直线段A与滑动槽的延伸路径方向不平行且不完全重叠。
进一步,所述基座上形成有限位机构,所述限位机构能够导引并限位驱动部仅在直线段A范围内移动。
进一步,所述基座上形成有沿直线段A方向延伸的容纳槽,所述连动组件包括有滑动杆,所述滑动杆滑动容纳于容纳槽,所述驱动部向上凸伸至基座外对应插入所述滑动槽。
进一步,所述限位机构为长条形凹槽状,所述驱动部穿过限位机构而向上凸伸至基座外。
进一步,所述夹取组件包括主体部及夹爪组件,所述滑动槽形成于主体部,所述夹爪组件包括一对夹爪及驱动件,一对所述夹爪结合于主体部且能够打开或闭合用于夹取物料,所述驱动件驱动一对夹爪打开或者闭合。
进一步,所述驱动件上形成有两个滑槽,所述两个滑槽的延伸方向呈一大于0度且小于90度的夹角,所述夹爪相对主体部的滑动方向与滑槽的延伸方向不平行且不完全重叠,各所述夹爪通过固定销活动结合于所述滑槽,所述驱动件上下运动,通过滑槽限位连动固定销进而一起带动夹爪相对主体部移动,进而实现一对夹爪的打开或者闭合动作。
进一步,所述基座上形成有贯穿孔,所述主体部转动结合于所述贯穿孔内,所述主体部的下表面形成有滑移槽,一对所述夹爪对应滑动结合于所述滑移槽内,所述夹爪向下凸伸至基座的下方,所述主体部上表面还形成有与滑移槽连通的安装孔,所述驱动件组装限位于安装孔内并与夹爪连动。
进一步,各所述夹爪上表面凹陷有位移槽,所述驱动件对应插入所述位移槽并且通过所述固定销与夹爪连动。
进一步,各所述驱动件上的两个滑槽为呈八字形的向下开口状开槽,两个所述夹爪被限位于主体部内,两个所述夹爪在打开至最大间距时,两个固定销之间的间距小于对应两个滑槽的八字形开口的最大开口宽度。
进一步,所述驱动件能够直接或者间接的实现直线往复运动,所述驱动件、夹爪及主体部之间无法相对转动,所述驱动件、夹爪及主体部整体相对基座转动。
与现有技术相比,本申请具有如下有益效果:能够简单且便捷的调整物料角度和位置。
附图说明
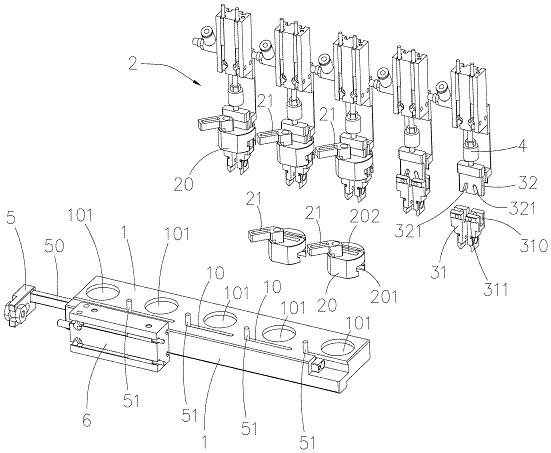
图1是本申请公开的一种全自动物料抓取调节装置集成至自动化设备上后的立体示意图。
图2是图1中方框内的结构的放大图。
图3是本申请公开的一种全自动物料抓取调节装置的立体示意图。
图4是图3所示本申请公开的一种全自动物料抓取调节装置的部分立体分解图。
图5是图3所示本申请公开的一种全自动物料抓取调节装置的部分立体分解图。
图6是图3所示本申请公开的一种全自动物料抓取调节装置的夹取组件旋转至另一角度时的立体示意图。
具体实施方式
需要说明的是,在不冲突的情况下,申请中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明申请。
在申请的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在申请中的具体含义。
在申请的描述中,需要理解的是,本文中使用的术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
为了本申请全文的表达准确性,所有涉及方向的请一律以图3为参照,其中将X轴所在方向定位为左右方向,其中X轴正向为右;其中将Y轴所在方向定位为前后方向,其中Y轴正向为前;其中将z轴所在方向定位为上下方向,其中Z轴正向为上。
请参考图1至图6所示,本申请公开了一种全自动物料抓取调节装置,用于结合至机械手或多轴移动平台或自动化设备上,包括基座1、旋转结合于所述基座1上的夹取组件2、第一驱动装置6及连动组件5。所述第一驱动装置6结合于基座1,所述第一驱动装置6驱动连动组件5进而连动夹取组件2运动。本申请中,所述第一驱动装置6可以是一种直线电机,或者是一种气缸组件,其能够提供实现往复运动。所述连动组件5上结合有驱动部51,所述夹取组件2上形成有滑动槽21,所述驱动部51对应插入滑动槽21内,所述驱动部51能够被第一驱动装置6驱动而相对基座1实现沿直线段A(未标示,直线段A实际表示下文所指的限位机构10的延伸路径)移动,所述直线段A与滑动槽21的延伸路径方向不平行且不完全重叠。
本申请通过上述第一驱动装置6驱动连动组件5,并通过驱动部51与滑动槽21的配合实现连动夹取组件2,进而使得夹取组件2实现在一定角度转动。进而实现被夹取组件2夹取的物料的角度变换。所述夹取组件2的旋转角度可以根据需要而调整,具体可以通过第一驱动装置6的直线位移而换算获得。当然,本申请的全自动物料抓取调节装置中,夹取组件2的转动角度具有一定的有效范围,一般设计成0度到90度的范围内较佳,当然转动角度也可设计的更大一些,但是无法超过180度。
请参考图3至图6所示,所述基座1上形成有限位机构10,所述限位机构10能够导引并限位驱动部51仅在直线段A范围内移动,具体的,所述限位机构10为长条形凹槽状,所述驱动部51穿过限位机构10而向上凸伸至基座1外,所述直线段A范围即指的是限位机构10的延伸路径。
请参考图3至图6所示,所述基座1上形成有沿直线段A方向(也就是左右方向)延伸的容纳槽11,所述连动组件5包括有滑动杆50,所述滑动杆50滑动容纳于容纳槽11,所述驱动部51向上穿过限位机构10凸伸至基座1外对应插入所述滑动槽21。本申请中,所述驱动部51实际是一种圆柱状轴,所述驱动部51为通过组装而与滑动杆50一体固定,具体可以是,先将滑动杆50插入容纳槽11,然后将驱动部51由上至下穿过限位机构10而插设固定于所述滑动杆50。
请参考图3至图6所示,所述夹取组件2包括主体部20及夹爪组件(未标号)。所述滑动槽21形成于主体部20,具体的所述主体部20上结合有一个延伸柱(未标号),所述延伸柱上贯穿形成有长条形的所述滑动槽21。所述延伸柱的设置用于使得主体部20的滑动槽21与驱动部51具有配合空间,而不会干涉到主体部20。所述夹爪组件包括一对夹爪31及驱动件32,一对所述夹爪31滑动结合于主体部20且能够打开或闭合,用于夹取物料,所述驱动件32驱动一对夹爪31打开或者闭合。
具体的,所述驱动件32上形成有两个滑槽321,所述两个滑槽的延伸方向之间呈一大于0度且小于90度的夹角,所述夹爪31相对主体部20的滑动方向与滑槽321的延伸方向不平行且不完全重叠,各所述夹爪31通过固定销311活动结合于所述滑槽321,所述驱动件32上下运动,通过滑槽321限位连动固定销311进而一起带动夹爪31相对主体部20移动,进而实现一对夹爪31的打开或者闭合动作。也就是说,将驱动件32的上下运动转化为两个夹爪31的打开或闭合运动。
请参考图3至图6所示,所述基座1上形成有贯穿孔101,所述主体部20转动结合于所述贯穿孔101内,所述主体部20的下表面形成有滑移槽201,一对所述夹爪31对应滑动结合于所述滑移槽201内,所述夹爪31向下穿过贯穿孔101凸伸至基座1的下方,所述夹爪31能够于滑移槽201内相对主体部20往复移动,但是不能相对主体部20转动且不能相对主体部20沿上下方向运动。所述主体部20的上表面还形成有与滑移槽201连通的安装孔202,所述驱动件32组装限位于安装孔202内并与夹爪31连动,具体为各所述夹爪31上表面凹陷有位移槽310,所述驱动件32对应插入所述位移槽310并且通过所述固定销311与夹爪31连动。
本申请中,各所述驱动件32上的两个滑槽321为呈八字形的向下开口状开槽,两个所述夹爪31被限位于主体部20内。两个所述夹爪31在打开至最大间距时,两个固定销311之间的间距小于对应两个滑槽321的八字形开口的最大开口宽度。此外,所述驱动件32直接或者间接的被一个直线电机4或者气缸构件4推动实现沿上下方向的直线往复运动,所述驱动件32、夹爪31及主体部20之间无法相对转动,所述驱动件32、夹爪31及主体部20整体相对基座1转动。
本申请通过简单的机械机构,实现了对物料的夹取及转动动作,不需要负责的多轴机械手便能实现。制造成本低廉,结构稳定。此外为了一次抓取多个,本申请中的夹取组件2设置了并列的多组。
以上所述仅为本申请的部分实施方式,不是全部的实施方式,本领域普通技术人员通过阅读本申请说明书而对本申请技术方案采取的任何等效的变化,均为本申请的权利要求所涵盖。
- 一种全自动物料抓取调节装置
- 一种全自动移载机物料抓取装置