驱动装置和成像系统
文献发布时间:2023-06-19 12:16:29
背景技术
在一些图像形成系统中,环形带用作中间转印带以用于二次转印调色剂图像。环形带与张力辊接合,并沿着旋转路径被驱动。当环形带在张力辊的纵向方向上蜿蜒时,通过使设置在环形带内部的转向辊倾斜来校正环形带的布置。
附图说明
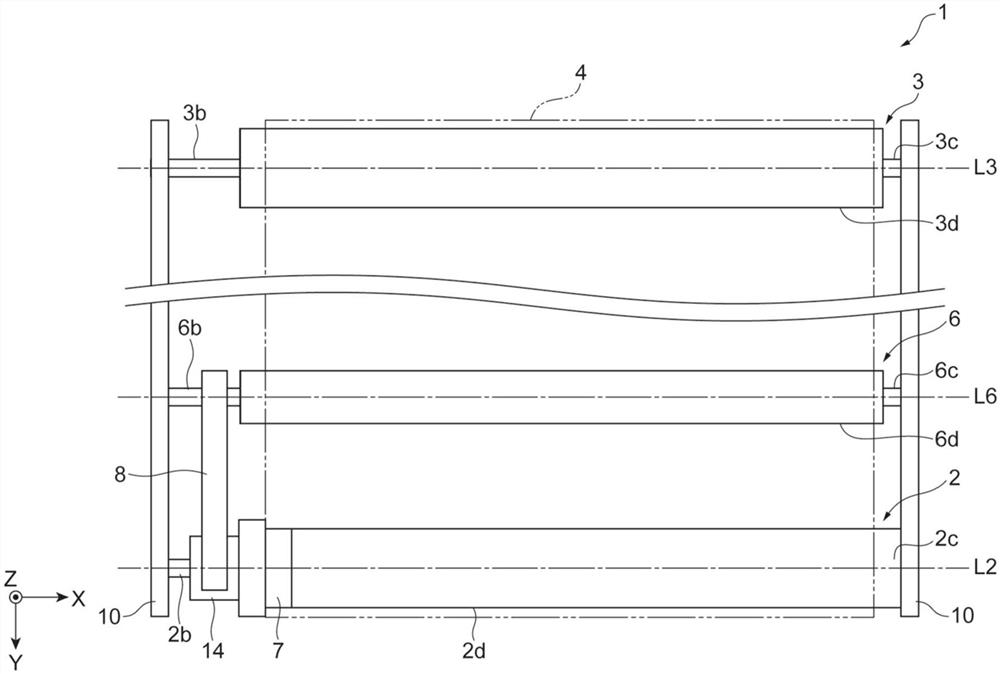
图1是例示带驱动设备的示例的平面图。
图2是示例带驱动设备的端部结构的透视图。
图3是示例端部结构的透视图。
图4(a)是在第一操作状态下的示例端部结构的侧视图。
图4(b)是在第二操作状态下例示的示例端部结构的侧视图。
图5(a)是在第一操作状态下的示例端部结构的剖视图。
图5(b)是在第二操作状态下的示例端部结构的剖视图。
图6(a)是示例调节构件的示意性透视图。
图6(b)是示例调节构件的示意性前视图。
图7(a)是示例带驱动设备的示例端部结构的侧视图,其中端部结构被例示在一种操作状态下。
图7(b)是示例带驱动设备的示例端部结构的侧视图,其中端部结构被例示在另一操作状态下。
具体实施方式
在以下描述中,参见附图,相同的附图标记被分配给相同的部件或具有相同功能的类似部件,并且重复的描述省略。参见附图中例示的XYZ正交坐标系,X方向可以指示宽度方向,Y方向可以指示前后方向,并且Z方向可以指示上下方向。
参见图1,示例带驱动设备1可以包括环形带4、张力辊2(带辊)、张力辊3(从动辊)、转向辊6(转向构件)、调节构件14和连杆机构8。图1例示的配置的相对位置关系、形状等是示意性的。示例带驱动设备1可以用作转印设备,该转印设备二次转印由示例图像形成系统(诸如打印机)中的显影设备显影的调色剂图像。在转印设备中,环形带4可以用作中间转印带。进一步,带驱动设备1可以用作传送片材的片材传送设备。在片材传送设备中,环形带4可以用作片材传送带。
在一些示例中,环形带4在设置在Y方向上的一端的张力辊2和在设置在Y方向上的另一端的张力辊3上拉伸。带驱动设备1可以包括用于张紧环形带4的其他张力辊。张力辊2和张力辊3在X方向上延伸,并且被设置为在与X方向相交的Y方向上(例如,从环形带的相对端)彼此面对。与X方向和Y方向相交的方向可以被设置为Z方向。张力辊2可以包括提供在环形带4内部并与环形带4接合的圆柱形辊体2d,以及在X方向上从辊体2d突出的旋转轴2b和2c。张力辊2的旋转轴2b和2c的外径小于张力辊2的辊体2d的外径。张力辊3可以包括提供在环形带4内部并与环形带4接合的圆柱形辊体3d,以及在X方向上从辊体3d突出的旋转轴3b和3c。
张力辊2可以通过从电动机(未例示)传递的动力沿着X方向围绕轴线L2旋转。随着张力辊2旋转,环形带4可以沿着旋转路径移动。在环形带4以环行方式移动时,张力辊3可以围绕轴线L3旋转。支撑张力辊2和3的轴承可以位于在X方向上的两侧,以由在Y方向上延伸的框架10支撑。在一些示例中,动力可以从电动机传递到张力辊3而不是张力辊2。在一些示例中,随着张力辊3旋转,环形带4以环行方式移动,并且随着环形带4旋转,张力辊2旋转。
转向辊6可以位于环形带4内部与张力辊2分离(例如,间隔开)的位置。例如,转向辊6可以在Y方向上被设置在张力辊2与张力辊3之间。在一些示例中,转向辊6在Y方向上相对于张力辊3被设置在靠近张力辊2的位置。转向辊6可以被设置为与从张力辊3朝向张力辊2移动的环形带4的内周向表面接触。
在一些示例中,转向辊6包括提供在环形带4内部并与环形带4接触的圆柱形辊体6d,以及在X方向上从辊体6d突出的旋转轴6b和6c(转向旋转轴)。在环形带4以环行方式移动时,转向辊6以从动方式围绕轴线L6旋转。转向辊6的旋转轴6b和6c由与框架10分离提供的辊保持构件(未例示)支撑。转向辊6的旋转轴6b和6c可以通过使用辊保持构件(未示出)的中心作为每个辊保持构件中的支点而在Z方向上移位。例如,转向辊6可以通过使用辊保持构件(未示出)的中心作为支点而倾斜。各种其他机构可以用作转向辊6的倾斜机构。在一些示例中,转向辊可以通过使用在Y方向上的中心作为支点而倾斜。
参见图2至图6(b),示例带驱动设备1的示例调节构件14沿着张力辊2的旋转轴2b被设置在辊体2d在X方向上的外侧。调节构件14与旋转轴2b间隔开,以避免与旋转轴2b接触(图3和图5A)。滑轮7(传动构件)在X方向上被设置在调节构件14与张力辊2的辊体2d之间。滑轮7被附接到张力辊2的旋转轴2b并与环形带4接合。张力辊2的旋转轴2b插入穿过滑轮7(见图4(a))。
参见图4(a)和4(b),滑轮7包括圆柱形部分11、凸缘部分12和小直径部分13。圆柱形部分11的外径基本上与张力辊2的辊体2d的外径相同。圆柱形部分11的外周向表面可以与环形带4的内周向表面接触。凸缘部分12相对于环形带4在径向方向上的外周向表面向外突出。凸缘部分12的内表面12a面对环形带4在X方向上的端表面4c并且可以与端表面4c接触。凸缘部分12的内表面12a是在张力辊2的轴线L2的延伸方向上向内定向的表面并且朝向环形带4定向。小直径部分13是直径小于圆柱形部分11的直径的圆柱形部分并且在X方向上向外突出。当环形带4在按压凸缘部分12的方向上移动时,凸缘部分12的内表面12a接收来自环形带4的端表面4c的力,并且滑轮7在沿着旋转轴2b的方向(例如,调节构件14的方向(图4(b))上移动。
参见图3、图6(a)和图6(b),调节构件14可以包括一对枢转部分14a和14a、一对旋转部分14b和14b(第一旋转部分)以及通信设备(在本文也被称为中间设备)14c。一对枢转部分14a和14a中的每个可以包括相应的旋转部分14b的旋转轴,并且可以由提供在调节构件14的外周中的枢转支撑部分140(图3)支撑。当滑轮7在沿着旋转轴2b的方向上移动时,枢转部分14a旋转调节构件14。枢转部分14a和14a在Y方向上彼此面对并且分别在Y方向上延伸。
在一些示例中,旋转部分14b和14b在Y方向上彼此面对,使得张力辊2的旋转轴2b介于其间,并且围绕作为旋转轴的相应枢转部分14a旋转。旋转部分14b在其上端部分处连接到枢转部分14a。旋转部分14b包括提供在其下端部分处的第一接触表面14r(接触表面)。第一接触表面14r是接触滑轮7的一部分。调节构件14可以在一对旋转部分14b和14b中的每个的第一接触表面14r中接触滑轮7。第一接触表面14r包括以可滑动方式接触滑轮7的第一弯曲表面14s。
在一些示例中,中间设备14c在Y方向上延伸,以与一对旋转部分14b和14b的上端部分连通。中间设备14c包括壁部分14t,该壁部分14t在Y方向的中心部分在Z方向上直立形成。中间设备14c的壁部分14t的上端表面是接触连杆机构8的第二接触表面14u。因此,调节构件14和连杆机构8彼此直接接触,其间没有任何结构。第二接触表面14u的一部分,具体而言,第二接触表面14u在X方向上的外端附近的区域,形成为以可滑动的方式接触连杆机构8的第二弯曲表面14v。参见图4(a),第二接触表面14u被设置在关于枢转部分14a与第一接触表面14r相对的一侧,并且用作操作连杆机构8的杠杆。从枢转部分14a到相应的第一接触表面14r的长度比从枢转部分14a到第二接触表面14u的长度长。
根据示例,调节构件14被支撑用以通过接收其中环形带4在旋转轴2b的纵向方向上移动的力而旋转,并且根据旋转运动生成涉及转向辊6的倾斜运动的按压力。例如,调节构件14被可旋转地支撑,使得环形带4沿着旋转轴2b的纵向方向的线性运动被转换为旋转运动,并且通过该旋转运动操作连杆机构8。例如,调节构件14可以旋转以向上按压连杆机构8。参见图4(a),在滑轮7在沿着旋转轴2b的方向(例如,调节构件14的方向)上移动之前的状态下(本文也被称为“正常状态”),调节构件14不旋转,并且在旋转部分14b的第一接触表面14r处与滑轮7的小直径部分13接触,并且在中间设备14c的第二接触表面14u处与连杆机构8接触。参见图4(b),当随着环形带4从该状态以蜿蜒方式移动,滑轮7在沿着旋转轴2b的方向(例如,调节构件14的方向)上移动(例如,线性移动)时,滑轮7的小直径部分13按压第一接触表面14r,并且旋转部分14b通过使用枢转部分14a作为旋转轴而旋转(本文也被称为“旋转状态”)。因此,中间设备14c的第二接触表面14u可以向上压倚靠(例如,提升)连杆机构8。以此方式,第二接触表面14u将由第一接触表面14r的线性运动施加的力引导到不同于线性运动的方向,使得连杆机构8在不同的方向上操作(例如,移动)。在第二接触表面14u向上按压连杆机构8的状态下,第二接触表面14u和连杆机构8彼此分离。
连杆机构8被可操作地连接到转向辊6,并且可以使转向辊6倾斜。例如,连杆机构8使转向辊6倾斜以减弱环形带4在转向辊6的旋转轴6b(例如,图1例示的转向旋转轴的第一端)处的张力,并且环形带4在转向辊6的旋转轴6c(例如,图1例示的转向旋转轴的第二端)处的张力变强。连杆机构8被联接在调节构件14与转向辊6之间,以将调节构件14的运动传递到转向辊6。例如,连杆机构8可以被设置为连接调节构件14和转向辊6,以将调节构件14的运动传递到转向辊6。参见图3,连杆机构8可以包括支点部分8a、接收部分8b、连续部分8c和按压部分8d。支点部分8a由固定到框架10的支撑轴18支撑。支撑轴18在Y方向上被设置在张力辊2与转向辊6之间并且在X方向上延伸。支点部分8a被提供有支撑轴18被插入通过的开口,并且支撑轴18通过该开口插入。支点部分8a可围绕支撑轴18旋转。
接收部分8b被连接到支点部分8a并在Y方向上向外突出。接收部分8b延伸到与调节构件14的中间设备14c的第二接触表面14u接触的位置。在正常状态下,接收部分8b与第二接触表面14u(例如,第二弯曲表面14v)接触。随着调节构件14的中间设备14c在Z方向上移动,接收部分8b上升(在Z方向上)。当中间设备14c向上移动时,接收部分8b以互锁方式向上移动。
连续部分8c被连接到支点部分8a并且在Y方向上向内延伸(朝向旋转轴6b)。连续部分8c在Y方向上延伸到与接收部分8b相对的一侧。连续部分8c延伸到转向辊6的旋转轴6b上方的位置。随着支点部分8a旋转,连续部分8c摆动(例如旋转)。按压部分8d被提供在连续部8c的前端(例如,与具有支点部分8a的连接位置相对的端部分)。当连续部分8c摆动时,按压部分8d向下移动,使得转向辊6的旋转轴6b被按压并且旋转轴6b被向下按压。在一些示例中,按压部分8d不一定直接按压旋转轴6b。例如,提供在旋转轴6b的外周中的容纳部分等可以被按压,以间接按压旋转轴6b并压下旋转轴6b。
在操作中,动力通过张力辊2被传递到环形带4,使得环形带4以环行方式移动。随着环形带4移动,张力辊3旋转。随着环形带4移动,转向辊6旋转。
参见图4(b),当环形带4的位置在宽度方向上偏离到外侧(例如,旋转轴2b的一侧)时,环形带4的端表面4c压靠滑轮7的凸缘部分12的内表面12a。当滑轮7被环形带4按压时,滑轮7向外移动,滑轮7的小直径部分13按压调节构件14的第一接触表面14r,并且调节构件14的旋转部分14b通过使用枢转部分14a作为旋转轴而旋转。因此,中间设备14c的第二接触表面14u向上按压连杆机构8的接收部分8b使得连杆机构8摆动或枢转。
参见图5(b),连杆机构8的按压部分8d向下移位,并且转向辊6的旋转轴6b被按压以向下移动。也就是说,转向辊6倾斜。
当转向辊6倾斜时,环形带4在旋转轴6b(见图1)处的张力减弱,并且环形带4在旋转轴6c(见图1)处的张力增加。因此,环形带4在宽度方向上朝向旋转轴6c移动,使得环形带4的位置偏差被校正。然后,当环形带4朝向旋转轴6c移动时,环形带4在X方向上向外按压滑轮7的力减弱。因此,旋转轴6b逐渐向上移动,并且连杆机构8的按压部分8d向上移动。根据该运动,接收部分8b向下移动并且调节构件14的中间设备14c被压下,使得调节构件14返回到正常状态。滑轮7被调节构件14按压回到初始位置。
在一些示例中,示例带驱动设备1包括环形带4、与环形带4接合并包括旋转轴2b的张力辊2、在环形带4的内部与张力辊2分离的转向辊6、可操作地连接到转向辊6并使转向辊6倾斜的连杆机构8,以及调节构件14,该调节构件14被可旋转地支撑以将环形带4沿着旋转轴2b的纵向方向的线性运动转换为旋转运动,并且根据环形带4的线性运动通过旋转运动来操作连杆机构8。
参见图4(b),在示例带驱动设备1中,调节构件14被可旋转地支撑使得环形带4沿着旋转轴2b的纵向方向的线性运动被转换为旋转运动,并且通过该旋转运动操作连杆机构8。因此,由于调节构件14不是沿着张力辊2的旋转轴2b操作,而是被操作为将沿着旋转轴2b的线性运动转换为旋转运动,所以即使当异物侵入调节构件14时,也防止或抑制旋转轴2b的外周向由于异物(诸如调色剂)和出现在旋转轴2b的外周向上的划痕而增大尺寸。由于防止或抑制在旋转轴2b的外周向上出现划痕,并且调节构件14不沿着旋转轴2b以线性运动移动,所以调节构件14更容易操作。当调节构件14未被操作时,环形带4的蜿蜒运动不能被校正。因此,当环形带4移动到滑轮7等上时,施加到环形带4的端部分的力增加,并且环形带4可能被损坏。因此,示例调节构件14更容易操作以抑制环形带4的损坏。
在一些示例中,调节构件14与旋转轴2b间隔开以避免与旋转轴2b接触,从而更可靠地防止可能进入调节构件14的异物在旋转轴2b的外周向上出现划痕。
在一些示例中,带驱动设备1包括滑轮7,该滑轮7被附接到张力辊2的旋转轴2b并与环形带4接合。调节构件14包括接触滑轮7的第一接触表面14r和响应于滑轮7的移动而旋转的枢转部分14a(例如,滑轮7在旋转轴2b的纵向方向上移动),以根据环形带4的线性运动更可靠地生成旋转运动。
在一些示例中,第一接触表面14r被形成在调节构件14的下端。因此,可以显著增加枢转部分14a与第一接触表面14r之间的距离,并且相对于调节构件14的旋转运动平缓地移位连杆机构8,以改善示例带驱动设备1的控制。
在一些示例中,调节构件14包括接触连杆机构8的第二接触表面14u,并且第二接触表面14u被设置在关于枢转部分14a与第一接触表面14r相对的一侧,并且构成用于操作连杆机构8的杠杆。第二接触表面14u被提供在与第一接触表面14r相对的一侧,并且接触连杆机构8以用作杠杆(梯子),以改善连杆机构的操作。
在一些示例中,第一接触表面14r包括可滑动地接触滑轮7的第一弯曲表面14s,并且第二接触表面14u包括可滑动地接触连杆机构8的第二弯曲表面14v,以响应于环形带4的蜿蜒运动更平稳地操作连杆机构8。
在带驱动设备1的一些示例中,从枢转部分14a到调节构件14的第一接触表面14r的长度比从枢转部分14a到第二接触表面14u的长度长,以相对于调节构件14的旋转运动更平缓地移位连杆机构8,从而改善带驱动设备1的控制。
在一些示例中,调节构件14旋转以向上按压连杆机构8。因此,由于连杆机构8中与转向辊6的连接位置(按压部分8d)向下倾斜,所以连接位置(旋转轴6b)处的环形带4的张力变弱,而旋转轴6c处的环形带4的张力变强。因此,环形带4在宽度方向上不存在连杆机构8的方向上移动,因此改善环形带4的位置偏差(蜿蜒)的校正。
在一些示例中,调节构件14包括一对旋转部分14b和14b,以在其间旋转旋转轴2b,以与单个结构执行旋转运动的情况相比改善旋转运动的稳定性(可靠性),并且改善调节构件14的耐用性。
在一些示例中,调节构件14和连杆机构8彼此直接接触,以通过调节构件14更可靠地操作连杆机构8。
在一些示例中,转向辊6包括旋转轴6b,并且连杆机构8使转向辊6倾斜,使得环形带4在旋转轴6b处的张力减小,并且环形带4在旋转轴6c处的张力增加。因此,环形带4在宽度方向上不存在连杆机构8的方向上移动,因此改善环形带的位置偏差(蜿蜒)的校正。
应该理解的是,并非本文描述的所有方面、优点和特征都必须通过任何一个特定示例来实现或被包括在任何一个特定示例中。实际上,本文已经描述和例示各种示例,显然其他示例可以在布置和细节上进行修改。
例如,尽管示例带驱动设备1具有调节构件14,该调节构件14包括旋转轴2b设置其间的一对旋转部分14b和14b,但这种布置可以被修改。例如,类似于图7A和图7B例示的示例带驱动设备201,调节构件214可以包括旋转部分214b(例如,第二旋转部分),该旋转部分214b被提供在张力辊2的旋转轴2b上方以执行旋转运动。如图7(a)例示,在正常状态下,调节构件214不执行旋转运动,在旋转部分214b的第一接触表面214r处与滑轮7的小直径部分13接触,并且在中间设备214c的第二接触表面214u处与连杆机构8接触。随着环形带4从该状态以如图7(b)例示的蜿蜒方式移动,当滑轮7在沿着旋转轴2b的方向(调节构件214的方向)上移动(例如,线性移动)时,滑轮7的小直径部分13按压第一接触表面214r。因此,旋转部分214b处于旋转状态,使得中间设备214c的第二接触表面214u向上按压连杆机构8。由于诸如调色剂的异物可能容易聚集在下侧,通过将调节构件214提供在旋转轴2b上方,可以防止诸如调色剂的异物混合在调节构件214内部。此外,在示例带驱动设备1中,调节构件14可以操作连杆机构8,并且连杆机构8可以使转向辊6倾斜。在修改的示例中,转向辊6可以通过调节构件的旋转而倾斜,而不提供连杆机构。
- 成像装置、成像方法、成像装置的驱动方法、以及成像系统
- 成像装置、成像系统以及用于驱动成像装置的方法