驾驶辅助系统
文献发布时间:2023-06-19 12:21:13
技术领域
本发明涉及辅助进行车辆驾驶的驾驶辅助控制,尤其涉及用于避免(回避)与车辆前方的目标物发生碰撞的驾驶辅助控制。
背景技术
专利文献1公开了一种辅助避免车辆与行人等物体发生碰撞的行驶辅助装置。行驶辅助装置判定基于摄像头和/或雷达检测出的物体是否存在于车行道区域和人行道区域中的某一方内。车行道区域基于路缘石、护栏等的检测位置来设定。在物体存在于车行道区域的情况下,辅助范围设定得比物体存在于人行道区域的情况下大。在物体的未来位置包括在辅助范围内的情况下,行驶辅助装置进行避撞控制以避免与物体的碰撞。
现有技术文献
专利文献1:日本特开2018-012360号公报
发明内容
发明所要解决的问题
对用于避免与车辆前方的目标物发生碰撞的驾驶辅助控制进行研究。特别对相对于横穿车辆前方的车行道区域的“横穿目标物”的驾驶辅助控制进行研究。假设在第1定时(timing)的横穿目标物的移动方向是接近车辆的方向,在第2定时的横穿目标物的移动方向是远离车辆的方向。在第2定时的与横穿目标物碰撞的可能性大幅地低于在第1定时的碰撞可能性。在不考虑这种差异而一样地进行驾驶辅助控制的情况下,会导致尽管碰撞可能性降低了但是驾驶辅助控制仍不必要地工作(起作用)。
本发明的一个目的在于,提供能够抑制用于避免与车辆前方的横穿目标物发生碰撞的驾驶辅助控制的不必要工作的技术。
用于解决问题的技术方案
第1观点涉及一种辅助进行车辆驾驶的驾驶辅助系统。
驾驶辅助系统具备:
存储装置,其存储表示车辆的驾驶环境的驾驶环境信息;以及
处理器,其基于驾驶环境信息执行驾驶辅助控制,该驾驶辅助控制包括用于避免与车辆前方的目标物发生碰撞的减速控制和转向控制中的至少一方。
驾驶辅助控制在目标物存在于辅助区域内的情况下工作,在目标物存在于辅助区域外的情况下不工作。
车辆所处的车行道区域是从车辆观察时位于第1侧的第1车行道边界和从车辆观察时位于与第1侧相反的第2侧的第2车行道边界之间的区域。
横穿目标物是从第1侧向第2侧横穿车辆前方的车行道区域的目标物。
相对于横穿目标物的辅助区域是从车辆观察时位于第1侧的辅助开始边界与从车辆观察时位于第2侧的辅助结束边界之间的区域。
处理器将相对于横穿目标物的辅助区域的辅助结束边界设定于车辆与第2车行道边界之间的位置。
根据第1观点,相对于横穿目标物的辅助区域的辅助结束边界被设定于车辆与第2车行道边界之间的位置。也即是说,从车辆观察时存在于第2侧的辅助区域被设定为比辅助结束边界是第2车行道边界的情况下的窄。其结果,针对沿远离车辆的方向移动的横穿目标物,驾驶辅助控制工作的期间变得比较短。即,能抑制针对碰撞可能性降低的横穿目标物而不必要地使驾驶辅助控制工作。由于抑制了驾驶辅助控制的不必要工作,因而车辆的乘员感觉的不适感(违和感)或者烦扰感减轻。
第2观点涉及一种辅助进行车辆驾驶的驾驶辅助系统。
驾驶辅助系统具备:
存储装置,其存储表示车辆的驾驶环境的驾驶环境信息;以及
处理器,其基于驾驶环境信息执行驾驶辅助控制,该驾驶辅助控制包括用于避免与车辆前方的目标物发生碰撞的减速控制和转向控制中的至少一方。
驾驶辅助控制在目标物存在于辅助区域内的情况下工作,在目标物存在于辅助区域外的情况下不工作。
车辆所处的车行道区域是从车辆观察时位于第1侧的第1车行道边界和从车辆观察时位于与第1侧相反的第2侧的第2车行道边界之间的区域。
横穿目标物是从第1侧向第2侧横穿车辆前方的车行道区域的目标物。
相对于横穿目标物的辅助区域是从车辆观察时位于第1侧的辅助开始边界与从车辆观察时位于第2侧的辅助结束边界之间的区域。
第1辅助宽度是车辆与辅助开始边界之间的距离。
第2辅助宽度是车辆与辅助结束边界之间的距离。
处理器以使第2辅助宽度小于第1辅助宽度的方式设定相对于横穿目标物的辅助区域。
根据第2观点,以使第2辅助宽度小于第1辅助宽度的方式设定相对于横穿目标物的辅助区域。也即是说,从车辆观察时存在于第2侧的辅助区域被设定为比从车辆观察时存在于第1侧的辅助区域窄。其结果,针对沿远离车辆的方向移动的横穿目标物,驾驶辅助控制工作的期间变得比较短。即,能抑制针对碰撞可能性降低的横穿目标物而不必要地使驾驶辅助控制工作。由于抑制了驾驶辅助控制的不必要工作,因而车辆的乘员感觉的不适感或者烦扰感减轻。
发明效果
根据本发明,能够抑制用于避免与车辆前方的横穿目标物发生碰撞的驾驶辅助控制的不必要工作。由于抑制了驾驶辅助控制的不必要工作,因而车辆的乘员感觉的不适感或者烦扰感减轻。
附图说明
图1是用于说明本发明的第1实施方式涉及的驾驶辅助系统的概要的概念图。
图2是表示比较例的概念图。
图3是用于说明本发明的第1实施方式涉及的驾驶辅助控制以及辅助区域的概念图。
图4是概略地表示本发明的第1实施方式涉及的车辆以及驾驶辅助系统的构成例的框图。
图5是表示本发明的第1实施方式中的驾驶环境信息的例子的框图。
图6是表示本发明的第1实施方式涉及的驾驶辅助系统所进行的驾驶辅助控制相关联的处理的流程图。
图7是用于说明本发明的第1实施方式涉及的辅助区域设定处理的第1例的概念图。
图8是用于说明本发明的第1实施方式涉及的辅助区域设定处理的第2例的概念图。
图9是表示本发明的第1实施方式涉及的辅助区域设定处理的流程图。
图10是用于说明本发明的第1实施方式涉及的辅助区域设定处理的其他例子的概念图。
图11是用于说明本发明的第2实施方式涉及的辅助区域设定处理的例子的概念图。
图12是表示本发明的第2实施方式涉及的辅助区域设定处理的流程图。
图13是用于说明本发明的第3实施方式涉及的辅助区域设定处理的例子的概念图。
图14是表示本发明的第3实施方式涉及的辅助区域设定处理的流程图。
图15是表示本发明的第4实施方式涉及的辅助区域设定处理的流程图。
图16是表示本发明的第5实施方式涉及的辅助区域设定处理的流程图。
图17是用于说明本发明的第6实施方式涉及的辅助区域设定处理的概要的概念图。
图18是用于说明本发明的第6实施方式涉及的辅助区域设定处理的例子的概念图。
图19是表示本发明的第6实施方式涉及的辅助区域设定处理的例子的流程图。
图20是用于说明本发明的第6实施方式涉及的辅助区域设定处理的变形例的概念图。
标号说明
1车辆;2车辆端;10驾驶辅助系统;20传感器组;21车辆状态传感器;22周边状况传感器;23摄像头(camera);24雷达;30行驶装置;100控制装置;110处理器;120存储装置;200驾驶环境信息;210车辆状态信息;220周边状况信息;230摄像头拍摄信息;240雷达测量信息;250道路构成(配置)信息;260目标物信息;CT横穿目标物;EG1第1道路端物体;EG2第2道路端物体;M1第1邻近划分线(车道标线);M2第2邻近划分线;ME1第1车行道外侧线;ME2第2车行道外侧线;OBS障碍物;RA车行道区域;RB1第1车行道边界;RB2第2车行道边界;SA辅助区域;SB1辅助开始边界;SB2辅助结束边界;SW1第1辅助宽度;SW2第2辅助宽度;TB临时边界位置。
具体实施方式
参照附图,对本发明的实施方式进行说明。
1.第1实施方式
1-1.概要
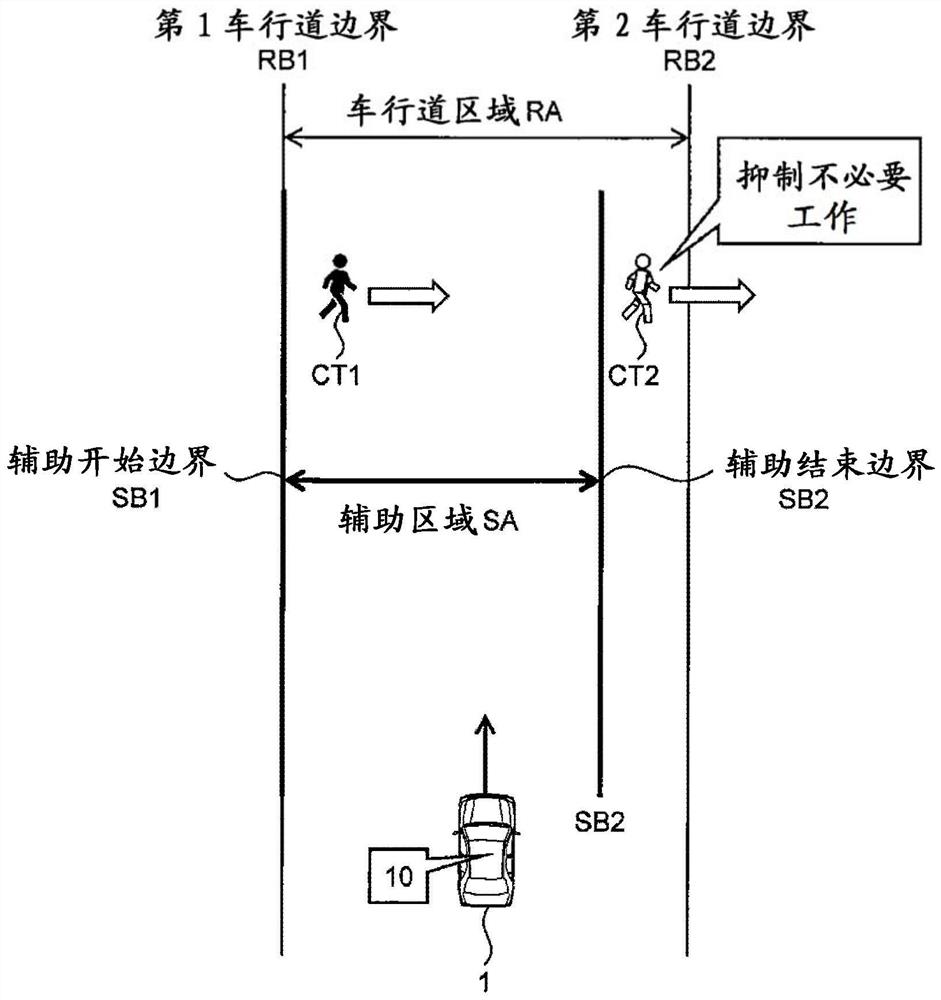
图1是用于说明第1实施方式涉及的驾驶辅助系统10的概要的概念图。驾驶辅助系统10进行辅助车辆1的驾驶的“驾驶辅助控制”。驾驶辅助控制也可以包含于对车辆1的自动驾驶进行控制的自动驾驶控制。典型地,驾驶辅助系统10搭载于车辆1。或者也可以,驾驶辅助系统10的至少一部分配置于车辆1外部的外部装置,远程地进行驾驶辅助控制。也即是说,驾驶辅助系统10也可以分布式地配置于车辆1和外部装置。
在本实施方式中,考虑用于避免与车辆1前方的目标物发生碰撞的驾驶辅助控制(避撞控制、风险回避控制)。作为回避对象的目标物例如包括行人、自行车、两轮车(摩托车)、其他车辆(前车、停泊车辆等)、动物、坠落物等。用于避免与车辆1前方的目标物发生碰撞的驾驶辅助控制包括减速控制和转向控制中的至少一方。即,驾驶辅助系统10为了避免与车辆1前方的目标物发生碰撞,自动地进行车辆1的减速和转向中的至少一方。
典型地,作为回避对象的目标物存在于车辆1前方的车行道或其附近。在本实施方式中,特别地,考虑从车辆1前方的车行道横穿的目标物。以下,将从车辆1前方的车行道横穿的目标物称为“横穿目标物CT”。作为这样的横穿目标物CT,例如包括行人、自行车、动物等。
为了更详细地对横穿目标物CT进行说明,先对车行道区域RA进行说明。如图1所示,车辆1存在于车行道区域RA。车行道区域RA是第1车行道边界RB1与第2车行道边界RB2之间的区域。第1车行道边界RB1是车行道区域RA的一方边界,从车辆1观察时位于第1侧(在图1所示的例子中为左侧)。第2车行道边界RB2是车行道区域RA的另一方边界,从车辆1观察时位于与第1侧相反的第2侧(在图1所示的例子中为右侧)。车行道边界例如是车行道外侧线(最外侧的划分线)。作为其他例子,车行道边界也可以是如路缘石、护栏、墙壁、中央分隔带这样的道路端物体。朝向第1侧的第1方向指的是朝向第1车行道边界RB1的方向,朝向第2侧的第2方向指的是朝向第2车行道边界RB2的方向。
横穿目标物CT是从第1侧向第2侧横穿车辆1前方的车行道区域RA的目标物。换言之,横穿目标物CT是沿第2方向横穿车辆1前方的车行道区域RA的目标物。更详细而言,横穿目标物CT越过第1车行道边界RB1进入车行道区域RA。进而,横穿目标物CT在车行道区域RA内向第2车行道边界RB2移动。然后,横穿目标物CT越过第2车行道边界RB2离开车行道区域RA。
接下来,参照图2以及图3,对用于避免与横穿目标物CT发生碰撞的驾驶辅助控制进行说明。为此,首先对“辅助区域SA”进行说明。
辅助区域SA是设定在车辆1前方的区域,用于判定是否使相对于目标物的驾驶辅助控制工作。具体而言,在目标物存在于辅助区域SA内的情况下,驾驶辅助控制工作。另一方面,在目标物存在于辅助区域SA外的情况下,驾驶辅助控制不工作。也即是说,驾驶辅助系统10执行驾驶辅助控制以使得避免与存在于辅助区域SA内的目标物发生碰撞。沿着车辆1的行进方向的辅助区域SA的纵向宽度例如设定为与预定的TTC(Time to Collision,避撞时间)相当的距离。辅助区域SA的横向宽度、特别是相对于横穿目标物CT的辅助区域SA的横向宽度如下。
首先,参照图2说明比较例。相对于横穿目标物CT的辅助区域SA是辅助开始边界SB1与辅助结束边界SB2之间的区域。辅助开始边界SB1是辅助区域SA的第1侧的边界,从车辆1观察时位于第1侧。另一方面,辅助结束边界SB2是辅助区域SA的第2侧的边界,从车辆1观察时位于第2侧。如上所述,横穿目标物CT从第1侧向第2侧横穿车辆1前方的车行道区域RA。当横穿目标物CT越过辅助开始边界SB1进入辅助区域SA时,相对于该横穿目标物CT的驾驶辅助控制开始。之后,当横穿目标物CT越过辅助结束边界SB2离开了辅助区域SA时,相对于该横穿目标物CT的驾驶辅助控制结束。
在图2所示的比较例中,辅助开始边界SB1是第1车行道边界RB1,辅助结束边界SB2是第2车行道边界RB2。也即是说,辅助区域SA的横向宽度与车行道区域RA的横向宽度一致。然而,在该比较例的情况下,相对于横穿目标物CT的驾驶辅助控制可能会超过必要地工作。为了对此进行说明,考虑图2所示的在两个定时处的横穿目标物CT。
在第1定时,从车辆1观察,横穿目标物CT位于第1侧的车行道区域RA。在第1定时之后的第2定时,从车辆1观察,横穿目标物CT位于第2侧的车行道区域RA。为了方便起见,将在第1定时的横穿目标物CT称为“第1横穿目标物CT1”,将在第2定时的横穿目标物CT称为“第2横穿目标物CT2”。第1横穿目标物CT1的移动方向是接近车辆1的方向。因此,针对第1横穿目标物CT1使驾驶辅助控制工作是妥当的。另一方面,第2横穿目标物CT2的移动方向是远离车辆1的方向。因此,与第2横穿目标物CT2碰撞的可能性大幅地低于与第1横穿目标物CT1碰撞的可能性。针对这样的第2横穿目标物CT2,未必需要与第1横穿目标物CT1同样地使驾驶辅助控制工作。
尽管碰撞可能性大幅地降低了但是针对第2横穿目标物CT2不必要地使驾驶辅助控制工作时,车辆1的乘员(典型地为驾驶员)会对该驾驶辅助控制的不必要工作感到不适或者烦扰。例如,在用于避免与横穿目标物CT的碰撞的减速控制在第2定时也照样工作的情况下,车辆1的乘员会对该不必要的减速控制感到不适或者烦扰。
于是,本实施方式提供能够抑制用于避免与横穿目标物CT发生碰撞的驾驶辅助控制的不必要工作的技术。
图3表示了本实施方式涉及的相对于横穿目标物CT的辅助区域SA的设定。根据本实施方式,驾驶辅助系统10将辅助区域SA的辅助结束边界SB2设定于车辆1与第2车行道边界RB2之间的位置。也即是说,从车辆1观察时存在于第2侧的辅助区域SA被设定为比上述的比较例(图2)的情况下的窄。其结果,针对沿远离车辆1的方向移动的第2横穿目标物CT2,驾驶辅助控制工作的期间变短。即,能抑制针对碰撞可能性降低的第2横穿目标物CT2而不必要地使驾驶辅助控制工作。由于抑制了驾驶辅助控制的不必要工作,因而车辆1的乘员(典型地为驾驶员)感觉的不适感或者烦扰感减轻。这有助于提高对驾驶辅助系统10的信赖。
辅助区域SA的辅助开始边界SB1也可以与比较例(图2)的情况下相同。即,辅助开始边界SB1也可以设定于第1车行道边界RB1的位置。由此,能够针对接近车辆1的第1横穿目标物CT1切实地使驾驶辅助控制工作。换言之,能防止针对接近车辆1的第1横穿目标物CT1而驾驶辅助控制不工作这样的事态。其结果,车辆1的乘员(典型地为驾驶员)的不安感减轻。这也有助于提高对驾驶辅助系统10的信赖。
本实施方式可以说是对辅助开始边界SB1和辅助结束边界SB2“非对称”地应用了各不相同的设定方针。从针对接近车辆1的第1横穿目标物CT1切实地使驾驶辅助控制工作这一观点,设定了辅助开始边界SB1。另一方面,从抑制相对于远离车辆1的第2横穿目标物CT2的驾驶辅助控制的不必要工作这一观点,设定了辅助结束边界SB2。通过这种非对称的设定,能够适当地执行相对于横穿目标物CT的驾驶辅助控制。
以下,更详细地对本实施方式涉及的驾驶辅助系统10进行说明。
1-2.驾驶辅助系统
1-2-1.构成例
图4是概略地表示本实施方式涉及的车辆1以及驾驶辅助系统10的构成例的框图。特别地,图4表示了与驾驶辅助控制相关联的构成例。车辆1具备传感器组20和行驶装置30。
传感器组20包括车辆状态传感器21。车辆状态传感器21检测车辆1的状态。例如,车辆状态传感器21包括车速传感器、偏航率(yaw rate)传感器、横向加速度传感器、转向角传感器等。车速传感器检测车辆1的车速。偏航率传感器检测车辆1的偏航率。横向加速度传感器检测车辆1的横向加速度。转向角传感器检测车辆1的车轮的转向角。
传感器组20还包括周边状况传感器22。周边状况传感器22检测车辆1周围的状况。具体而言,周边状况传感器22包括摄像头23以及雷达(毫米波雷达)24。摄像头23是拍摄车辆1周围的状况的拍摄装置。雷达24是测量车辆1周围的状况的测距传感器。周边状况传感器22也可以还包括激光雷达(LIDAR:Laser Imaging Detection and Ranging)。
行驶装置30包括转向装置、驱动装置以及制动装置。转向装置使车辆1的车轮转向。例如,转向装置包括动力转向(EPS:Electric Power Steering)装置。驱动装置是产生驱动力的动力源。作为驱动装置,例如包括发动机、电动机、轮毂电机(in-wheel motor)等。制动装置产生制动力。
驾驶辅助系统10至少包括控制装置100。驾驶辅助系统10也可以包括传感器组20。驾驶辅助系统10也可以包括行驶装置30。
控制装置100控制车辆1。典型地,控制装置100是搭载于车辆1的微型计算机。控制装置100也被称为ECU(Electronic Control Unit,电子控制单元)。或者,控制装置100也可以是车辆1外部的信息处理装置。在该情况下,控制装置100与车辆1进行通信,远程地控制车辆1。
控制装置100具备处理器110以及存储装置120。处理器110执行各种处理。在存储装置120中存储各种信息。作为存储装置120,例如包括易失性存储器、非易失性存储器等。通过处理器110执行作为计算机程序的控制程序,从而实现处理器110(控制装置100)的各种处理。控制程序存储于存储装置120、或者记录于计算机可读取的记录介质。
1-2-2.信息取得处理
处理器110(控制装置100)执行取得表示车辆1的驾驶环境的驾驶环境信息200的“信息取得处理”。驾驶环境信息200基于由搭载于车辆1的传感器组20得到的检测结果来取得。所取得的驾驶环境信息200被存储于存储装置120。
图5是表示驾驶环境信息200的例子的框图。驾驶环境信息200包括车辆状态信息210以及周边状况信息220。
车辆状态信息210是表示车辆1的状态的信息。作为车辆1的状态,例如包括车速、偏航率、横向加速度、转向角等。处理器110从由车辆状态传感器21得到的检测结果取得车辆状态信息210。
周边状况信息220是表示车辆1周围的状况的信息。处理器110基于由周边状况传感器22得到的检测结果取得周边状况信息220。例如,周边状况信息220包括摄像头拍摄信息230、雷达测量信息240、道路构成信息250以及目标物信息260。
摄像头拍摄信息230是表示由摄像头23得到的拍摄结果的信息。摄像头拍摄信息230包括表示由摄像头23拍摄到的车辆1周围的状况的图像信息。
雷达测量信息240是表示由雷达24得到的测量结果的信息。雷达测量信息240包括与车辆1周围的物体有关的信息(例如相对位置以及相对速度)。
道路构成信息250是与车辆1周围的道路构成有关的信息。车辆1周围的道路构成包括划分线(白线)以及道路端物体。道路端物体是表示道路的端部的立体障碍物。作为道路端物体,例如包括路缘石、护栏、墙壁、中央分隔带、草丛等。道路构成信息250至少表示划分线和/或道路端物体的位置(相对于车辆1的相对位置)。
例如,通过解析摄像头拍摄信息230(图像信息),能够识别划分线,并计算该划分线的相对位置。作为图像解析方法,例如包括语义分割(Semantic Segmentation)和边缘检测。同样地,通过解析摄像头拍摄信息230(图像信息),能够识别道路端物体,并计算该道路端物体的相对位置。或者,由于来自立体的道路端物体的雷达波的反射强度强,因而也能够从雷达测量信息240取得道路端物体的相对位置。
目标物信息260是与车辆1周围的目标物有关的信息。作为目标物,例如包括行人、自行车、两轮车、其他车辆(前车、停泊车辆等)、动物、坠落物等。目标物信息260表示目标物相对于车辆1的相对位置以及相对速度。例如,通过解析摄像头拍摄信息230(图像信息),能够识别目标物,并计算该目标物的相对位置。另外,基于雷达测量信息240,也能够识别目标物,并取得该目标物的相对位置和相对速度。目标物信息260也可以包含目标物的移动方向和/或移动速度。目标物的移动方向和/或移动速度能够通过跟踪目标物的位置来计算。
1-2-3.车辆行驶控制
处理器110(控制装置100)执行控制车辆1的行驶的“车辆行驶控制”。车辆行驶控制包括控制车辆1的转向的转向控制、控制车辆1的加速的加速控制以及控制车辆1的减速的减速控制。处理器110通过控制行驶装置30来执行车辆行驶控制。具体而言,处理器110通过控制转向装置来执行转向控制。另外,处理器110通过控制驱动装置来执行加速控制。另外,控制装置100通过控制制动装置来执行减速控制。
1-2-4.驾驶辅助控制的概要
处理器110(控制装置100)执行辅助进行车辆1的驾驶的“驾驶辅助控制”。特别地,处理器110执行用于避免与车辆1前方的目标物发生碰撞的驾驶辅助控制(避撞控制、风险回避控制)。用于避免与车辆1前方的目标物发生碰撞的驾驶辅助控制包括减速控制和转向控制中的至少一方。处理器110基于上述的驾驶环境信息200执行驾驶辅助控制。
图6是表示本实施方式涉及的驾驶辅助控制相关联的处理的流程图。图6所示的处理流程按一定周期反复执行。
在步骤S110中,处理器110执行上述的信息取得处理。即,处理器110基于由传感器组20得到的检测结果取得驾驶环境信息200。驾驶环境信息200被存储于存储装置120。
在步骤S120中,处理器110基于目标物信息260,判定车辆1前方是否存在目标物。换言之,处理器110判定是否在车辆1前方的区域内识别到目标物。
特别地,横穿目标物CT是从第1侧向第2侧横穿车辆1前方的车行道区域RA的目标物。处理器110将从第1侧向第2侧横穿车辆1前方的车行道区域RA的目标物识别为横穿目标物CT。车行道区域RA的边界(RB1、RB2)是车行道外侧线或者道路端物体。车行道外侧线和道路端物体的位置根据道路构成信息250来获得。目标物的位置和移动方向根据目标物信息260来获得。因此,处理器110能够基于道路构成信息250和目标物信息260识别横穿目标物CT。
在车辆1前方存在目标物的情况下(步骤S120:是),处理前进至步骤S130。另一方面,在车辆1前方不存在目标物的情况下(步骤S120:否),本次循环中的处理结束。
在步骤S130中,处理器110执行设定相对于目标物的辅助区域SA的“辅助区域设定处理”。辅助区域SA是设定在车辆1前方的区域,用于判定是否使相对于目标物的驾驶辅助控制工作。关于辅助区域设定处理的详情,将会在后面进行说明。
在后续的步骤S140中,处理器110判定驾驶辅助控制的工作条件是否成立。驾驶辅助控制的工作条件是目标物存在于辅助区域SA内。目标物的位置根据目标物信息260来获得。在工作条件成立的情况下(步骤S140:是),处理前进至步骤S150。另一方面,在工作条件不成立的情况下(步骤S140:否),处理前进至步骤S160。
在步骤S150中,处理器110执行驾驶辅助控制,也即是说使驾驶辅助控制工作。具体而言,处理器110为了避免车辆1与目标物的碰撞,基于驾驶环境信息200执行上述的减速控制和转向控制中的至少一方。例如,处理器110基于车辆状态信息210和目标物信息260,计算为了避免与目标物的碰撞所需的目标减速度和目标转向角中的至少一方。处理器110按照目标减速度来控制制动装置。另外,处理器110按照目标转向角来控制转向装置。
在步骤S160中,处理器110不执行驾驶辅助控制。也即是说,处理器110不使驾驶辅助控制工作。在驾驶辅助控制已经在执行中的情况下,处理器110使驾驶辅助控制停止。
1-3.辅助区域设定处理(步骤S130)
以下,对相对于横穿目标物CT的辅助区域设定处理(步骤S130)详细进行说明。作为辅助区域设定处理,考虑有各种例子。
1-3-1.第1例
图7是用于说明相对于横穿目标物CT的辅助区域设定处理的第1例的概念图。在第1例中,对道路上存在划分线的情况进行说明。
在图7中表示了三车道道路。车辆1位于中央的车道L0。在车道L0的第1侧存在第1车道L1。在车道L0的第2侧存在第2车道L2。
从车辆1观察,在第1侧存在第1邻近划分线M1、第1车行道外侧线ME1以及第1道路端物体EG1。第1邻近划分线M1是车道L0的第1侧的划分线,表示车道L0与第1车道L1的边界。第1邻近划分线M1可以说是从车辆1观察时存在于第1侧的划分线中的离车辆1最近的划分线。第1车行道外侧线ME1是第1车道L1的第1侧的划分线,表示第1车道L1与第1路肩RS1的边界。第1路肩RS1是第1车行道外侧线ME1与第1道路端物体EG1之间的区域。
从车辆1观察,在第2侧存在第2邻近划分线M2、第2车行道外侧线ME2以及第2道路端物体EG2。第2邻近划分线M2是车道L0的第2侧的划分线,表示车道L0与第2车道L2的边界。第2邻近划分线M2可以说是从车辆1观察时存在于第2侧的划分线中的离车辆1最近的划分线。第2车行道外侧线ME2是第2车道L2的第2侧的划分线,表示第2车道L2与第2路肩RS2的边界。第2路肩RS2是第2车行道外侧线ME2与第2道路端物体EG2之间的区域。
车行道区域RA的边界(RB1、RB2)是车行道外侧线或者道路端物体。例如,车行道区域RA是第1车行道外侧线ME1与第2车行道外侧线ME2之间的区域。在该情况下,第1车行道边界RB1是第1车行道外侧线ME1,第2车行道边界RB2是第2车行道外侧线ME2。作为另一例,车行道区域RA也可以是第1道路端物体EG1与第2道路端物体EG2之间的区域。在该情况下,第1车行道边界RB1是第1道路端物体EG1,第2车行道边界RB2是第2道路端物体EG2。
辅助区域SA的设定如下。处理器110将辅助区域SA的辅助开始边界SB1设定于第1车行道边界RB1的位置。另一方面,处理器110将辅助区域SA的辅助结束边界SB2无关于第2车行道边界RB2地进行设定。具体而言,处理器110将辅助结束边界SB2设定于第2邻近划分线M2的位置而并非第2车行道边界RB2。第2邻近划分线M2位于车辆1与第2车行道边界RB2之间。由此,辅助结束边界SB2将会被设定于车辆1与第2车行道边界RB2之间的位置。
第1车行道边界RB1和第2邻近划分线M2的位置根据道路构成信息250来获得。因此,处理器110能够基于道路构成信息250设定辅助开始边界SB1和辅助结束边界SB2,并设定辅助区域SA。
1-3-2.第2例
图8是用于说明相对于横穿目标物CT的辅助区域设定处理的第2例的概念图。在第2例中,对道路上不存在划分线的情况进行说明。适当省略与第1例重复的说明。
在图8中,车行道区域RA是第1道路端物体EG1与第2道路端物体EG2之间的区域。也即是说,第1车行道边界RB1是第1道路端物体EG1,第2车行道边界RB2是第2道路端物体EG2。
处理器110将辅助区域SA的辅助开始边界SB1设定于第1车行道边界RB1的位置。另一方面,处理器110基于车辆端2设定辅助区域SA的辅助结束边界SB2,车辆端2是车辆1的第2侧的端部(侧部)。更详细而言,处理器110将辅助结束边界SB2设定于从车辆端2向第2侧离开第2距离d2的位置。
例如,第2距离d2是车辆端2与第2横穿目标物CT2之间的横向距离的容许最小值。一般而言,车辆1会与第1道路端物体EG1和/或第2道路端物体EG2保持某种程度的距离进行行驶。从车辆端2离开第2距离d2的位置一般来说位于车辆1与第2道路端物体EG2(第2车行道边界RB2)之间。
或者,第2距离d2也可以设定为使得辅助结束边界SB2位于车辆1与第2道路端物体EG2(第2车行道边界RB2)之间。第2道路端物体EG2的位置根据道路构成信息250来获得。因此,处理器110能够基于道路构成信息250设定第2距离d2以及辅助结束边界SB2。
1-3-3.处理流程
图9是表示本实施方式涉及的辅助区域设定处理(步骤S130)的流程图。
在步骤S131中,处理器110将辅助区域SA的辅助开始边界SB1设定于第1车行道边界RB1的位置。
在步骤S132中,处理器110基于道路构成信息250,判定车辆1周围的道路上是否存在划分线。在存在划分线的情况下(步骤S132:是),处理前进至步骤S133。另一方面,在不存在划分线的情况下(步骤S132:否),处理前进至步骤S135。
在步骤S133中,处理器110将辅助区域SA的辅助结束边界SB2设定于第2邻近划分线M2的位置(参照图7)。
在步骤S135中,处理器110将辅助区域SA的辅助结束边界SB2设定于从车辆端2向第2侧离开第2距离d2的位置(参照图8)。
1-3-4.补充说明
图10表示不发生驾驶辅助控制的不必要工作的状况。应注意,与图7、图8相比,第1侧和第2侧是相反的。在图10所示的例子中,车道L0位于最外侧,第2邻近划分线M2成为第2车行道外侧线ME2。第2横穿目标物CT2存在于与车辆1相同的车道L0。针对存在于相同的车道L0的第2横穿目标物CT2,使驾驶辅助控制工作是妥当的,并非不必要。根据上述的图9中所示的流程,辅助结束边界SB2设定于第2邻近划分线M2、也即是说第2车行道边界RB2的位置。虽然该辅助结束边界SB2不位于车辆1与第2车行道边界RB2之间,但不是会发生驾驶辅助控制的不必要工作的状况,因此,图9中所示的流程在实际应用上没有问题。
2.第2实施方式
在第2实施方式中,对上述的图7中所示的第1例的变形例进行说明。
如上所述,通过解析摄像头拍摄信息230(图像信息),能够识别划分线,并计算该划分线的位置。但是,划分线的位置计算精度不一定高。例如,划分线(白线)的模糊不清会使位置计算精度降低。另外,由车辆1的振动(特别是纵摇)引起的摄像头23的振动也会使位置计算精度降低。
划分线的计算位置的误差会影响辅助区域SA的设定精度。例如,由于划分线的计算位置的误差,辅助区域SA有可能变得比预期的窄。在该情况下,针对必要的目标物,驾驶辅助控制可能不工作。于是,在第2实施方式中,对划分线的计算位置的误差加以考虑。
图11是用于说明第2实施方式涉及的辅助区域设定处理的例子的概念图。适当省略与图7中所示的第1例重复的说明。
车行道区域RA的第1车行道边界RB1设定于从第1车行道外侧线ME1向第1侧离开距离α的位置。同样地,车行道区域RA的第2车行道边界RB2设定于从第2车行道外侧线ME2向第2侧离开距离α的位置。距离α是考虑车行道外侧线的计算位置的误差而设定的预定值。
辅助区域SA的设定如下。处理器110将辅助区域SA的辅助开始边界SB1设定于第1车行道边界RB1的位置。另外,处理器110将辅助区域SA的辅助结束边界SB2设定于从第2邻近划分线M2向第2侧离开第1距离β的位置。第1距离β是考虑第2邻近划分线M2的计算位置的误差而设定的预定值。第1距离β既可以与距离α相同,也可以与距离α不同。不论怎样,第1距离β都明显小于一般的车道宽度。
图12是表示第2实施方式涉及的辅助区域设定处理(步骤S130)的流程图。与上述的图9中所示的流程相比,由步骤S134替换了步骤S133。在步骤S134中,处理器110将辅助区域SA的辅助结束边界SB2设定于从第2邻近划分线M2向第2侧离开第1距离β的位置。
根据第2实施方式,能获得与第1实施方式的情况下同样的效果。再者,由于考虑了划分线的计算位置的误差,因而能防止辅助区域SA变得比预期的窄。其结果,能抑制必要的驾驶辅助控制不工作这一情况。
3.第3实施方式
在第3实施方式中,对上述的图8中所示的第2例的变形例进行说明。
图13是用于说明第3实施方式涉及的辅助区域设定处理的例子的概念图。在图13所示的例子中,在横穿目标物CT的移动方向上存在有妨碍横穿目标物CT移动的障碍物OBS。具体而言,障碍物OBS是如栅栏、墙壁、建筑物、护栏这样的壁状物体(立体连续结构物)。典型地,障碍物OBS与第2道路端物体EG2一致。横穿目标物CT无法物理地越过这样的障碍物OBS。
根据图8中所示的第2例,辅助区域SA的辅助结束边界SB2被设定于从车辆端2向第2侧离开第2距离d2的位置。在该辅助结束边界SB2与车辆端2之间存在障碍物OBS的情况下,横穿目标物CT无法物理地到达辅助结束边界SB2。在该情况下,即使在横穿目标物CT到达障碍物OBS后,驾驶辅助控制也不停止而继续工作。换言之,在横穿目标物CT结束横穿后,驾驶辅助控制也继续工作。这可能会引起车辆1的乘员的不适感。
于是,根据第3实施方式,首先将从车辆端2向第2侧离开第2距离d2的位置计算为“临时边界位置TB”。在临时边界位置TB与车辆端2之间存在障碍物OBS的情况下,将辅助区域SA的辅助结束边界SB2设定于车辆端2与障碍物OBS之间的位置。例如,辅助结束边界SB2设定于从障碍物OBS向第1侧离开第3距离d3的位置。第3距离d3小于第2距离d2(d3 图14是表示第3实施方式涉及的辅助区域设定处理(步骤S130)的流程图。适当省略与图9重复的说明。在不存在划分线的情况下(步骤S132:否),处理前进至步骤S135-1。 在步骤S135-1中,处理器110计算从车辆端2向第2侧离开第2距离d2的位置作为临时边界位置TB。 在步骤S135-2中,处理器110判定在临时边界位置TB与车辆端2之间是否存在障碍物OBS。基于摄像头拍摄信息230或者雷达测量信息240来识别障碍物OBS。障碍物OBS的位置根据道路构成信息250来获得。 在临时边界位置TB与车辆端2之间不存在障碍物OBS的情况下(步骤S135-2:否),处理前进至步骤S135-3。在步骤S135-3中,处理器110将辅助区域SA的辅助结束边界SB2设定于临时边界位置TB。该步骤S135-3与图9中所示的步骤S135实质上相同。 另一方面,在临时边界位置TB与车辆端2之间存在障碍物OBS的情况下(步骤S135-2:是),处理前进至步骤S136。在步骤S136中,处理器110将辅助区域SA的辅助结束边界SB2设定于车辆端2与障碍物OBS之间的位置。例如,处理器110将辅助结束边界SB2设定于从障碍物OBS向第1侧离开第3距离d3的位置。 根据第3实施方式,能获得与第1实施方式的情况下同样的效果。再者,能够抑制在横穿目标物CT到达障碍物OBS后驾驶辅助控制继续工作。 4.第4实施方式 图15是表示第4实施方式涉及的辅助区域设定处理(步骤S130)的流程图。第4实施方式是第2实施方式与第3实施方式的组合。与图14中所示的流程相比,由步骤S134替换了步骤S133。在步骤S134中,处理器110将辅助区域SA的辅助结束边界SB2设定于从第2邻近划分线M2向第2侧离开第1距离β的位置。 根据第4实施方式,能获得与第2实施方式以及第3实施方式的情况下同样的效果。 5.第5实施方式 图16是表示第5实施方式涉及的辅助区域设定处理(步骤S130)的流程图。适当省略与上述的实施方式重复的说明。步骤S131与上述的实施方式的情况下是同样的。 在步骤S137中,处理器110识别第2车行道边界RB2的位置。第2车行道边界RB2是第2车行道外侧线ME2或者第2道路端物体EG2。因此,处理器110能够根据道路构成信息250取得第2车行道边界RB2的位置。然后,处理器110将辅助结束边界SB2设定于车辆1与第2车行道边界RB2之间的位置。例如,处理器110将辅助结束边界SB2设定于车辆1与第2车行道边界RB2之间的中间位置。 根据第5实施方式,能获得与第1实施方式的情况下同样的效果。 6.第6实施方式 6-1.概要 图17是用于说明第6实施方式涉及的辅助区域设定处理的概要的概念图。适当省略与上述的实施方式重复的说明。 第1辅助宽度SW1是车辆1与辅助区域SA的辅助开始边界SB1之间的距离(横向宽度)。第2辅助宽度SW2是车辆1与辅助区域SA的辅助结束边界SB2之间的距离(横向宽度)。根据第6实施方式,处理器110以使第2辅助宽度SW2小于第1辅助宽度SW1的方式设定相对于横穿目标物CT的辅助区域SA。换言之,处理器110将第1辅助宽度SW1与第2辅助宽度SW2非对称地进行设定。第1辅助宽度SW1与第2辅助宽度SW2的比率既可以为恒定值,也可以动态地变动。第1辅助宽度SW1和第2辅助宽度SW2中的至少一方既可以为恒定值,也可以动态地变动。 由于第2辅助宽度SW2小于第1辅助宽度SW1,因而从车辆1观察时存在于第2侧的辅助区域SA比从车辆1观察时存在于第1侧的辅助区域SA窄。其结果,驾驶辅助控制针对第2横穿目标物CT2工作的期间比驾驶辅助控制针对第1横穿目标物CT1工作的期间短。即,能抑制针对碰撞可能性降低的第2横穿目标物CT2而不必要地使驾驶辅助控制工作。由于抑制了驾驶辅助控制的不必要工作,因而车辆1的乘员(典型地为驾驶员)感觉的不适感或者烦扰感减轻。这有助于提高对驾驶辅助系统10的信赖。 另外,由于第1辅助宽度SW1比较大,因而能够针对接近车辆1的第1横穿目标物CT1切实地使驾驶辅助控制工作。换言之,能防止针对接近车辆1的第1横穿目标物CT1而驾驶辅助控制不工作这样的事态。其结果,车辆1的乘员(典型地为驾驶员)的不安感减轻。这也有助于提高对驾驶辅助系统10的信赖。 6-2.辅助区域设定处理的例子 图18以及图19分别是表示第6实施方式涉及的辅助区域设定处理(步骤S130)的例子的概念图以及流程图。 在步骤S131中,处理器110将辅助区域SA的辅助开始边界SB1设定于第1车行道边界RB1的位置。 在后续的步骤S138中,处理器110计算车辆1与第1车行道边界RB1之间的距离作为第1辅助宽度SW1。第1车行道边界RB1是第1车行道外侧线ME1或者第1道路端物体EG1。第1车行道外侧线ME1或者第1道路端物体EG1的位置根据道路构成信息250来获得。因此,处理器110能够基于道路构成信息250计算第1辅助宽度SW1。 在步骤S139中,处理器110基于通过步骤S138得到的第1辅助宽度SW1,设定辅助区域SA的辅助结束边界SB2。具体而言,处理器110将第2辅助宽度SW2设定为小于第1辅助宽度SW1。例如,处理器110通过对第1辅助宽度SW1乘以小于1的修正系数来计算第2辅助宽度SW2。而且,处理器110将辅助结束边界SB2设定于从车辆1(车辆端2)向第2侧离开第2辅助宽度SW2的位置。 6-3.变形例 图20是用于说明第6实施方式涉及的辅助区域设定处理的变形例的概念图。在图20中,表示了与上述的图7(第1实施方式的第1例)中所示的状况相同的状况。辅助区域SA的辅助开始边界SB1是第1车行道边界RB1(第1车行道外侧线ME1),比车道L0的第1邻近划分线M1更远离车辆1。另一方面,辅助区域SA的辅助结束边界SB2是车道L0的第2邻近划分线M2。因此,第2辅助宽度SW2小于第1辅助宽度SW1。 根据以上所述,可以说上述的图9中所示的处理流程也能够应用于第6实施方式。特别是在车道L0与第1车行道边界RB1之间存在别的车道的情况下,根据图9中所示的处理流程,第2辅助宽度SW2变得小于第1辅助宽度SW1。 同样地,在上述的图11(第2实施方式)中所示的状况下,第2辅助宽度SW2也变得小于第1辅助宽度SW1。因此,上述的图12中所示的处理流程也能够应用于第6实施方式。
- 驾驶辅助系统的电源管理方法、装置及驾驶辅助系统
- 用于车辆的驾驶辅助系统、带驾驶辅助系统的车辆和用于车辆的驾驶辅助方法