一种抗慢变干扰的相平面姿态控制方法
文献发布时间:2023-06-19 12:22:51
技术领域
本发明涉及一种抗慢变干扰的相平面姿态控制方法,特别涉及航天器在轨运行过程中慢变干扰的喷气补偿方法,属于姿态控制技术领域。
背景技术
航天器在轨运行中会受到多种外部慢变干扰,其中典型的慢变干扰包括:变轨过程中由于变轨发动机推力偏心和航天器的质心偏差产生的常值大干扰力矩;低轨道航天器受到的慢变气动干扰力矩;空间飞行器普遍受到的重力梯度力矩、太阳光压力矩等呈慢变特性的空间环境力矩。慢变干扰的长期积累会严重影响航天器姿态控制精度,导致稳态特性难以满足任务要求,喷气次数增多,燃料消耗增加。
发明内容
本发明的技术解决问题是:克服现有技术的不足之处,提供了一种抗慢变干扰的相平面姿态控制方法,通过对干扰的实时估计与补偿,实现了慢变干扰下的相平面控制补偿设计,能够有效提高系统对干扰的适应能力,兼顾闭环系统稳态性能,减少了喷气次数和燃料消耗。
本发明的技术解决方案是:
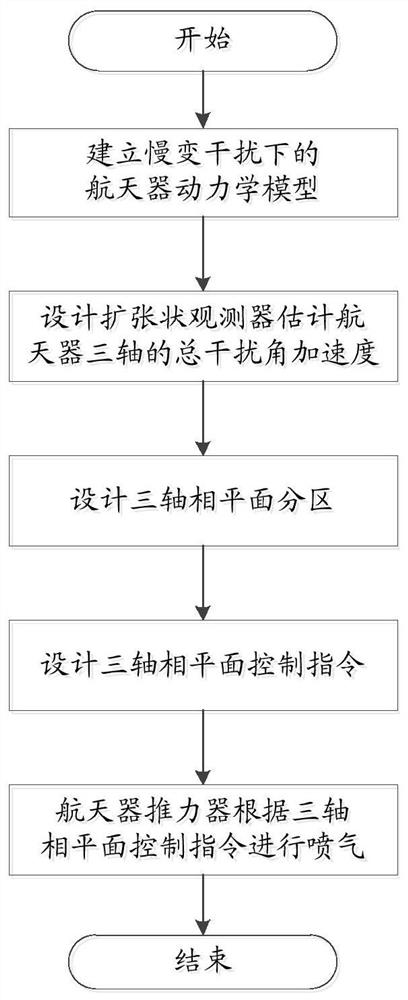
一种抗慢变干扰的相平面姿态控制方法,该方法所针对的航天器上配置有大推力器和小推力器,该具体步骤包括:
(1)建立慢变干扰下的航天器动力学模型;
(2)建立用于估计航天器三轴的总干扰角加速度的扩张状态观测器,并使用所建立的扩张状态观测器估计航天器三轴的总干扰角加速度;
(3)构建三轴的相平面,并将所构建的三轴相平面分别分为七个区;
(4)根据步骤(1)中所建立的慢变干扰下的航天器动力学模型、根据所述步骤(2)的扩张状态观测器估计出的三轴总干扰角加速度和步骤(3)的三轴相平面分区,得到每轴相平面的七个区的控制指令;
(5)航天器的推力器根据步骤(4)得到的三轴相平面控制指令进行喷气。
所述步骤(1)的建立的慢变干扰下的航天器动力学模型为:
其中,x
d
D=[d
Y=[y
V=[v
所述步骤(2)中,建立用于估计航天器滚动轴的总干扰角加速度的扩张状态观测器Σ
其中,z
β
β
β
函数fal(e
航天器滚动轴的总干扰角加速度的理论值
所述步骤(2)中,建立用于估计航天器俯仰轴的总干扰角加速度的扩张状态观测器Σ
其中,z
β
β
β
函数fal(e
航天器俯仰轴的总干扰角加速度的理论值
所述步骤(2)中,建立用于估计航天器偏航轴的总干扰角加速度的扩张状态观测器Σ
其中,z
β
β
β
函数fal(e
航天器偏航轴的总干扰角加速度的理论值
6、根据权利要求1所述的一种抗慢变干扰的相平面姿态控制方法,其特征在于:
所述步骤(3)中,构建三轴的相平面,分别为:滚动轴相平面、俯仰轴相平面和偏航轴相平面,滚动轴相平面由滚动角x
将滚动轴相平面分为七个区,七个区分别为:关机区S
以x
所述S
所述S
所述S
所述S
所述S
所述S
所述S
将俯仰轴相平面分为七个区,七个区分别为:关机区S
以x
所述S
所述S
所述S
所述S
所述S
所述S
所述S
将偏航轴相平面分为七个区,七个区分别为:关机区S
以x
所述S
所述S
所述S
所述S
所述S
所述S
所述S
所述步骤(4)中,关机区的相平面控制指令为:
针对滚动轴,在当前采样时刻t
针对俯仰轴,在当前采样时刻t
针对偏航轴,在当前采样时刻t
所述步骤(4)中,右侧大推力全开区的相平面控制指令为:
针对滚动轴,在当前采样时刻t
针对俯仰轴,在当前采样时刻t
针对偏航轴,在当前采样时刻t
所述步骤(4)中,左侧大推力全开区的相平面控制指令为:
针对滚动轴,在当前采样时刻t
针对俯仰轴,在当前采样时刻t
针对偏航轴,在当前采样时刻t
所述步骤(4)中,右侧小推力步进区的相平面控制指令为:
(i)针对滚动轴,在当前采样时刻t
若满足
若满足
若满足
若满足
(ii)针对俯仰轴,在当前采样时刻t
若满足
若满足
若满足
若满足
(iii)针对偏航轴,在当前采样时刻t
若满足
若满足
若满足
若满足
所述步骤(4)中,左侧小推力步进区的相平面控制指令为:
(i’)针对滚动轴,在当前采样时刻t
若满足
若满足
若满足
若满足
(ii’)针对俯仰轴,在当前采样时刻t
若满足
若满足
若满足
若满足
(iii’)针对偏航轴,在当前采样时刻t
若满足
若满足
若满足
若满足
所述步骤(4)中,右侧小推力抗外滑区的相平面控制指令为:
(I)针对滚动轴,在当前采样时刻t
若满足
若满足
(II)针对俯仰轴,在当前采样时刻t
若满足
若满足
(III)针对偏航轴,在当前采样时刻t
若满足
若满足
所述步骤(4)中,左侧小推力抗外滑区的相平面控制指令为:
(I’)针对滚动轴,在当前采样时刻t
若满足
若满足
(II’)针对俯仰轴,在当前采样时刻t
若满足
若满足
(III’)针对偏航轴,在当前采样时刻t
若满足
若满足
所述步骤(4)中,在计算右侧小推力步进区和左侧小推力步进区的相平面控制指令中的三轴相平面控制喷气长度之前,对三轴干扰角加速度估计进行限幅,具体限幅方法为:
针对滚动轴,当
针对俯仰轴,当
针对偏航轴,当
在根据航天器三轴姿态角测量输出值设计所述扩张状态观测器之前,还对航天器三轴姿态角测量输出值进行了惯性滤波处理,具体滤波方法为:
针对滚动轴,设计惯性滤波形式为:
针对俯仰轴,设计惯性滤波形式为:
针对偏航轴,设计惯性滤波形式为:
所述步骤(5)中,航天器的推力器根据步骤(4)得到的三轴相平面控制指令进行喷气,具体为:
针对航天器的滚动轴,在当前采样时刻t
针对航天器的俯仰轴,在当前采样时刻t
针对航天器的偏航轴,在当前采样时刻t
本发明与现有技术相比的有益效果是:
本发明提出的一种抗慢变干扰的相平面控制方法,与目前常用的相平面控制设计方法相比,引入了根据实时干扰估计对相平面控制补偿量进行适应性调整的策略。通过快速准确估计干扰,进而根据干扰估计调整相平面控制补偿量,实现对干扰补偿控制的精细设计。因此,得到的新方法对干扰具有更强的适应性,同时兼顾闭环系统稳态性能,减少了喷气次数和燃料消耗。
附图说明
图1为本发明的抗慢变干扰的相平面控制方法流程图;
图2为本发明的第i轴(i=1,2,3分别表示滚动轴、俯仰轴、偏航轴)相平面分区示意图;
图3为本发明控制方案对施加在三轴的外部慢变干扰力矩估计曲线;
图4为基于干扰角加速度估计器的相平面控制方法对施加在三轴的外部慢变干扰力矩估计曲线;
图5为本发明控制方案下的三轴姿态角变化曲线;
图6为基于干扰角加速度估计器的相平面控制方法下的三轴姿态角变化曲线;
图7为本发明控制方案下的三轴喷气控制力矩曲线;
图8为基于干扰角加速度估计器的相平面控制方法下的三轴喷气控制力矩曲线。
具体实施方式
下面结合附图对本发明的具体实施方式进行进一步的详细描述。
如图1所示,本发明的具体步骤实现如下(以下以航天器姿态稳定任务为例来说明方法的具体实现):
(1)建立慢变干扰下的航天器动力学模型。
航天器姿态运动学方程为:
其中,
航天器姿态动力学方程为
其中,
根据上述航天器姿态运动学方程可得:
其中,C
根据上述航天器姿态运动学方程和动力学方程可得:
其中
因此,可以得到慢变干扰下的航天器动力学模型为:
其中,y=[y
(2)设计扩张状态观测器估计三轴的总干扰角加速度。
下面说明针对第i,i=1,2,3轴的扩张状态观测器的设计过程。基于第(1)步得到的慢变干扰下的航天器第i轴动力学模型可得:
其中,i=1,2,3分别对应滚动轴、俯仰轴及偏航轴,a
为减少测量噪声影响,采用惯性滤波方法进行处理:
其中,参数α
设计扩张状态观测器的形式为
其中,函数
(3)针对由三轴的姿态角及姿态角速度所构成的相平面,设计三轴的相平面分区。
以第i轴为例进行说明,第i轴姿态的相平面控制的分区呈中心对称,如图2所示,包括关机区S
(4)针对相平面各分区设计三轴相平面控制指令。
在当前采样时刻t
其中,ε
具体地,在进行第i轴相平面控制指令中的喷气长度T
(5)航天器的推力器根据步骤(4)得到的三轴相平面控制指令进行喷气。具体为:
针对航天器的滚动轴,在当前采样时刻t
针对航天器的俯仰轴,在当前采样时刻t
针对航天器的偏航轴,在当前采样时刻t
本发明提出的抗慢变干扰相平面控制方法或系统工程易实现,同时扩张状态观测器以及相平面控制方法,都已在工程实践中得到了广泛验证,具有实用性。本方法可推广应用于采用喷气推力器完成姿态控制任务的各类航天器。
实施例:
通过方法一和方法二的对比仿真说明本发明优点。
方法一:本发明方法。具体设计如下:
(1)建立慢变干扰下的航天器动力学模型为
其中,航天器转动惯量矩阵为
(2)设计扩张状态观测器估计三轴的总干扰角加速度
先对三轴姿态测量进行惯性滤波
其中,y
再设计三轴的扩张状态观测器为
其中,函数
(3)设计三轴相平面分区,具体相平面分区参数如下表2所示
(4)根据表1及三轴相平面分区,设计三轴相平面控制指令,涉及的三轴相平面控制参数如下表3所示。
(5)航天器的推力器根据上述步骤(4)得到的三轴相平面控制指令进行喷气。具体为:
针对航天器的滚动轴,在当前采样时刻t
针对航天器的俯仰轴,在当前采样时刻t
针对航天器的偏航轴,在当前采样时刻t
方法二:《卫星姿态动力学与控制》(屠善澄主编,宇航出版社,2001)第443页的基于干扰角加速度估计器的相平面控制方法。具体设计方法如下:
(I)以俯仰轴为例,滚动轴和偏航轴的设计方法类似。采用干扰角加速度估计器估计俯仰轴的干扰角加速度,其中状态方程为
其中w
式中ω
干扰角加速度估计器为
其中,干扰角速度估计器增益阵K=[1000,10]
(II)采用和方法一同样的相平面分区和相平面控制参数。由于方法二没有在小推力抗外滑区对干扰进行补偿,因此在方法二中将三轴相平面控制中的小推力抗外滑区的喷气长度计算公式中的
取系统仿真初值
根据仿真结果,得到如下结论:
1、本发明提出的抗慢变干扰相平面控制方案是可行的。图3给出了施加在三轴上的外部干扰力矩的估计情况,表明本方案可以快速准确地估计出外部慢变干扰。如图5给出了三轴姿态控制情况,表明本发明方案可以对干扰进行有效补偿,三轴姿态控制的稳态性能较好。图7给出了三轴喷气情况,表明在进行干扰补偿过程中俯仰轴和偏航轴喷气次数较少,没有造成明显的喷气频繁和对喷现象。
2、方法二难以对外部慢变干扰进行准确估计,导致闭环系统稳态性能难以达到满意效果。如图4所示,当施加在俯仰轴和偏航轴的外部慢变干扰较大时,干扰估计结果与理论值存在较大偏差。图6给出了在控制补偿作用下的三轴姿态变化情况,表明俯仰角和偏航角的稳态控制误差较大。图8给出了三轴喷气情况,表明在进行干扰补偿过程中,俯仰轴和偏航轴喷气频繁,消耗燃料较多。
本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
- 一种抗慢变干扰的相平面姿态控制方法
- 一种大角度姿态机动相平面控制方法及系统