行驶辅助系统
文献发布时间:2023-06-19 13:26:15
技术领域
本发明涉及行驶辅助系统。
背景技术
在下述专利文献1中公开了如下的技术:使行驶车辆在设定于田地内的目标直行路径上自动直行,在行驶车辆到达田地的田埂边时解除自动直行,通过使行驶车辆在与刚才的目标直行路径邻接的目标直线路径上自动直行,来对田地内的行驶车辆的行驶进行辅助。
在该技术中,驾驶行驶车辆的作业者通过操作方向盘来立即解除行驶车辆的自动直行,通过作业者对方向盘的操作而执行行驶车辆的转弯。
专利文献1:日本特开2017-176096号公报
在使用这样的技术使行驶车辆在田地内行驶时,使用以下那样的显示系统。在构成供作业者操作的操作部的显示部显示目标直行路径,作业者一边确认显示部的显示一边决定使行驶车辆转弯的时机。因此,转弯的时机在各目标直行路径上并非恒定,存在在每个目标直行路径上都不同的情况。特别是,在田地的形状不是单纯的长方形的情况下,在每个目标直行路径上最适宜的转弯的时机都不同,因此存在难以使行驶车辆在所有的目标直行路径上合适地转弯的担忧。
发明内容
因此,本发明的一个目的在于提供一种行驶辅助系统,能够在使行驶车辆在田地内自动直行的情况下使作业者识别出合适的转弯的时机。
本发明的一个实施方式提供一种行驶辅助系统,包括:引导线设定部,其在田地内设定与划分上述田地的多个外周边分别平行地延伸的多个引导线;直行导向线设定部,其在上述田地内设定相互隔开间隔并平行地延伸的多个直行导向线;行驶控制部,其使行驶车辆沿着上述直行导向线自动直行,根据设置于上述行驶车辆的操作部的操作解除上述自动直行而使上述行驶车辆能够手动转向操纵;以及显示部,其一起重叠显示上述田地的形状、多个上述引导线、多个上述直行导向线以及上述行驶车辆的当前位置。
根据该结构,能够在使行驶车辆在田地内自动直行的情况下使作业者识别出合适的转弯的时机。
附图说明
图1是表示本发明的一个实施方式所涉及的行驶辅助系统的结构的示意图。
图2是用于对上述行驶辅助系统所具备的作业车辆在田地内行驶的状况进行说明的示意图。
图3是表示上述行驶辅助系统的电气构成的框图。
图4是表示设定于田地的引导线以及直行导向线的示意图。
图5A是当上述作业车辆在田地行驶时显示于上述作业辅助系统所具备的行驶辅助装置的显示部的图像的示意图。
图5B是当上述作业车辆在田地行驶时显示于上述行驶辅助装置的显示部的图像的示意图。
图5C是当上述作业车辆在田地行驶时显示于上述行驶辅助装置的显示部的图像的示意图。
图5D是当上述作业车辆在田地行驶时显示于上述行驶辅助装置的显示部的图像的示意图。
图5E是当上述作业车辆在田地行驶时显示于上述行驶辅助装置的显示部的图像的示意图。
图6是相对于各外周边设定有多个引导线的田地的示意图。
具体实施方式
以下,参照附图对本发明的实施方式详细地进行说明。
图1是表示本发明的一个实施方式所涉及的行驶辅助系统1的结构的示意图。参照图1,行驶辅助系统1是对田地F内的作业车辆2的行驶进行辅助的系统。
行驶辅助系统1包括能够在田地F内一边行驶一边作业的作业车辆2和对作业车辆2的行驶进行辅助的行驶辅助装置3。作业车辆2能够通过WiFi等与行驶辅助装置3无线通信。行驶辅助装置3能够由驾驶(操作)作业车辆2的作业者来操作。
在该说明书中,作业车辆2包括由行驶机和被行驶机牵引的作业机构成的作业车辆或行驶机与作业机成为一体的作业车辆。
作业车辆2例如包括行驶机10(行驶车辆)和被行驶机10牵引的作业机11。在该实施方式中,行驶机10是拖拉机。作为作业机11,例如能够举出撒肥机(施肥机)、撒药机、滚卷式打包机、耕地机、犁、平整机、割草机、播种机、收割机等。在该实施方式中,作业机11是耕地机。
此外,作为行驶机与作业机成为一体的作业车辆,例如能够举出插秧机、联合收割机等。
行驶机10包括供作业机11安装的行驶机体12。行驶机体12的前部被左右一对前轮17支承,其后部被左右一对后轮18支承。
在行驶机体12的前部配置有发动机罩19。在本实施方式中,在该发动机罩19内收容有作为行驶机10的驱动源的发动机20、燃料箱(未图示)等。
在发动机罩19的后方配置有用于供操作人员搭乘的驾驶室21。在驾驶室21的内部设置有能够供操作人员就座的座椅23、用于供作业者进行各种操作的操作部44。
作为操作部44,能够举出用于供操作人员进行转向操作的方向盘22、切换开关(未图示)、速度设定部(未图示)等。切换开关是根据作业者的操作为了在自动转向操纵模式与手动转向操纵模式之间切换行驶机10的转向操纵模式而供作业者操作的开关。
自动转向操纵模式是行驶机10自动地(通过后述的行驶机控制部40)被转向操纵的转向操纵模式。手动转向操纵模式是根据作业者对方向盘22的手动操作而将行驶机10转向操纵的转向操纵模式。
将用于从手动转向操纵模式向自动转向操纵模式切换的作业者的操作称为自动转向操纵开始操作。将用于从自动转向操纵模式向手动转向操纵模式切换行驶机10的转向操纵模式的作业者的操作称为自动转向操纵解除操作。除切换开关的操作之外,也通过由作业者操作方向盘22,来来从自动转向操纵模式向手动转向操纵模式切换行驶机10的转向操纵模式。
即便在行驶机10的转向操纵模式是自动转向操纵模式以及手动转向操纵模式的任一种的情况下,也能够通过操作速度设定部来设定作业车辆2的车速。
在行驶机体12的下部设置有行驶机10的底盘25。底盘25由机体框架26、变速器27、前桥28、后桥29等构成。
机体框架26是行驶机10的前部的支承部,直接或者经由防振构件等支承发动机20。变速器27使来自发动机20的动力发生变化并向前桥28以及后桥29传递。前桥28将从变速器27输入的动力向前轮17传递。后桥29将从变速器27输入的动力向后轮18传递。
经由PTO轴(未图示)向作业机11传递发动机20的驱动力的一部分。作业机11能够通过经由PTO轴被传递来的发动机20的驱动力进行耕地作业。在作业机11的下部设置有多个以水平配置的轴30为中心被旋转驱动的耕地爪31。
通过使作业机11下降至旋转的耕地爪31与田地F的地面接触的下位置,能够进行与该作业高度对应的规定深度的田地F的耕地作业。另外,通过停止耕地爪31的旋转或者使作业机11上升至旋转的耕地爪31离开田地F的地面的上位置(图1所示的位置),能够使耕地作业停止。换句话说,通过作业机11的升降,能够将作业机11的状态切换为由作业机11进行耕地作业的作业状态与不进行作业机11的耕地作业的非作业状态的任一个。即便在作业机11为耕地机以外的情况下,也能够通过作业机的升降将作业机的状态切换为作业状态与非作业状态。
图2是用于对作业车辆2一边作业一边在田地F内行驶的状况进行说明的示意图。图2示出了作业车辆2在田地F内一边作业一边行驶时的行驶路径R。
参照图2,作业车辆2在田地F内蛇行,之后,在田地F的外周边PL(外周边PL1、PL2、PL3、PL4)的附近环绕。
详细而言,作业车辆2首先从外周边PL的任意(例如,外周边PL1)的一端侧朝向另一端侧一边自动直行一边作业之后,若到达与该外周边PL1的另一端连接的外周边PL2的附近,则不作业而转弯。自动直行是指在转向操纵模式为自动转向操纵模式的状态(自动转向操纵状态)下使作业车辆2直行。
作业车辆2之后向与刚才相反方向一边自动直行一边作业。即,作业车辆2从外周边PL1的另一端侧朝向一端侧一边自动直行一边作业。作业车辆2若到达与该外周边PL1的一端连接的外周边PL4的附近,则不作业而转弯。
作业车辆2反复自动直行和转弯,在从外周边PL1的附近移动至与外周边PL1对置的外周边PL3的附近之后,在多个外周边PL的附近一边作业一边环绕。由此,田地F内的作业结束。
图3是表示行驶辅助系统1的电气构成的框图。
参照图3,行驶机10包括控制部(以下,为“行驶机控制部40”)。行驶机控制部40包括具备CPU以及存储器41(易失性存储器、非易失性存储器等)的微型计算机。行驶机控制部40控制行驶机10的动作(前进、后退、停止、转弯等动作)。
在行驶机控制部40电连接有多个控制器(控制器组42)、定位信息计算部43、操作部44、无线通信部45以及惯性测量装置46。
多个控制器控制行驶机10的各部分。多个控制器包括:控制发动机20(参照图1)的转速等的发动机控制器、控制行驶机10的车速的车速控制器、控制行驶机10的前轮17的转向角的转向控制器、控制升降缸(未图示)而使作业机11升降的升降控制器、控制PTO轴的旋转的PTO控制器等。
定位信息计算部43与安装于作业车辆2(行驶机10)的卫星信号接收用天线47电连接。卫星信号接收用天线47接收来自构成卫星定位系统的定位卫星的信号。卫星信号接收用天线47安装于行驶机10的驾驶室21的顶棚(参照图1)。卫星定位系统例如是GNSS(GlobalNavigation Satellite System:全球导航卫星系统)。由卫星信号接收用天线47接收到的定位信号被输入定位信息计算部43。
定位信息计算部43对规定的时间间隔(例如,1秒间隔)的作业车辆2的定位信息进行计算。定位信息包括作业车辆2(严格来说,为卫星信号接收用天线47)的位置信息(例如纬度、经度信息)和与位置信息对应的时刻信息。行驶机控制部40从定位信息计算部43获取定位信息。
惯性测量装置46是能够确定出作业车辆2的姿势(行驶机10的朝向)、加速度等的传感器单元。具体而言,惯性测量装置46具备相对于相互正交的第1轴、第2轴以及第3轴的每一个安装角速度传感器和加速度传感器而成的传感器组。
行驶机控制部40将从发动机20起动至发动机20停止的期间的规定的时间间隔(例如,1秒间隔)的位置信息朝向行驶辅助装置3发送。
行驶辅助装置3包括控制行驶辅助装置3的控制部(以下,称为“辅助装置控制部50”。)。辅助装置控制部50包括具备CPU以及存储器(易失性存储器、非易失性存储器等)51的微型计算机。在辅助装置控制部50电连接有无线通信部52、操作显示部53、操作部54以及存储部55。
无线通信部52是用于供辅助装置控制部50与作业车辆2无线通信的通信接口。操作显示部53例如是触摸面板显示器。操作部54例如是操作按钮。存储部55由硬盘、非易失性存储器等存储设备构成。
如图2所示,在田地F的形状不是长方形或正方形而是相互对置的外周边PL彼此相互不平行的四边形形状的情况下,适于转弯开始的位置不是横向排列的,而是每次直行行驶时都不同。因此,在所有的直行行驶之后以合适的时机使作业车辆2开始转弯较困难。
因此,在该实施方式中,如图4所示,在田地F内设定有与多个外周边PL中的任一个(例如,外周边PL1)平行且相互隔开恒定的间隔D并平行地延伸的多个直行导向线SL和在田地F内与多个外周边PL平行并分别延伸的多个引导线GL(引导线GL1、GL2、GL3以及GL4)。
如图3所示,辅助装置控制部50包括在田地F内设定多个引导线GL的引导线设定部60和在田地F内设定多个直行导向线SL的直行导向线设定部61。
引导线设定部60例如将使预先登记于行驶辅助装置3的田地F(登记田地)的外周边PL向田地F的内侧偏移而得的直线的延长线设定为引导线GL。在没有登记田地F的位置信息的情况下,需要作业者在作业车辆2在田地F内进行作业之前预先在田地F的外周边PL的附近环绕。引导线设定部60基于在作业车辆2预先在外周边PL的附近环绕时得到的行驶轨迹来设定引导线GL。具体而言,引导线设定部60将连结开始沿着外周边PL的直行行驶的位置SP(参照图4)与停止沿着该外周边PL的直行行驶的位置EP(参照图4)的直线的延长线设为引导线GL。
直行导向线设定部61例如通过使预先登记于行驶辅助装置3的田地F(登记田地)的外周边PL向田地F的内侧偏移来设定多个直行导向线SL。直行导向线设定部61也可以将基于在作业车辆2预先在外周边PL的附近环绕时得到的行驶轨迹而设定出的引导线GL和使该引导线GL偏移而得到的直线的延长线设定为直行导向线SL。
存储部55包括存储与田地F相关的信息(田地信息)的田地信息存储部56。田地信息包括田地F的多个外周边PL的位置信息、设定于田地F的引导线GL以及直行导向线SL等。将存储有外周边PL的位置信息的田地F称为登记田地。
上述的自动转向操纵开始操作能够仅在行驶机10存在于直行导向线SL上并且由惯性测量装置46检测出的行驶机10的朝向为与直行导向线SL平行的朝向的情况下进行。
行驶机控制部40包括行驶控制部48,上述行驶控制部48根据自动转向操纵开始操作使作业车辆2自动直行,根据自动转向操纵解除操作解除自动直行而使作业车辆2能够手动转向操纵。行驶控制部48基于从定位信息计算部43获取到的位置信息使作业车辆2自动直行。行驶机控制部40包括作业机控制部49,上述作业机控制部49通过控制升降控制器,在作业车辆2为自动直行中时使作业机11向下位置移动,在作业车辆2的自动直行被解除时使作业机11向上位置移动。换句话说,伴随着作业车辆2的自动直行的开始而自动地开始作业机11的作业,伴随着作业车辆2的自动直行的解除而自动地结束作业机11的作业。
辅助装置控制部50还包括对显示于操作显示部53的内容进行控制的显示控制部62。通过显示控制部62控制操作显示部53的显示内容,而在操作显示部53一起重叠显示田地F的形状、多个引导线GL、多个直行导向线SL、作业车辆2的当前位置等。
接下来,使用图5A~图5E,对显示于操作显示部53的显示内容的变化进行说明。在操作显示部53中,以能够与其他部分区分开的方式显示在田地F内作业车辆2一边行驶一边进行了作业的作业结束区域W。图5A~图5E是当作业车辆2在田地行驶时显示于操作显示部53的图像的示意图。
如图5A所示,在直行导向线SL的行驶过程中,一起重叠显示田地F的形状、多个直行导向线SL、作业车辆2的当前位置等。
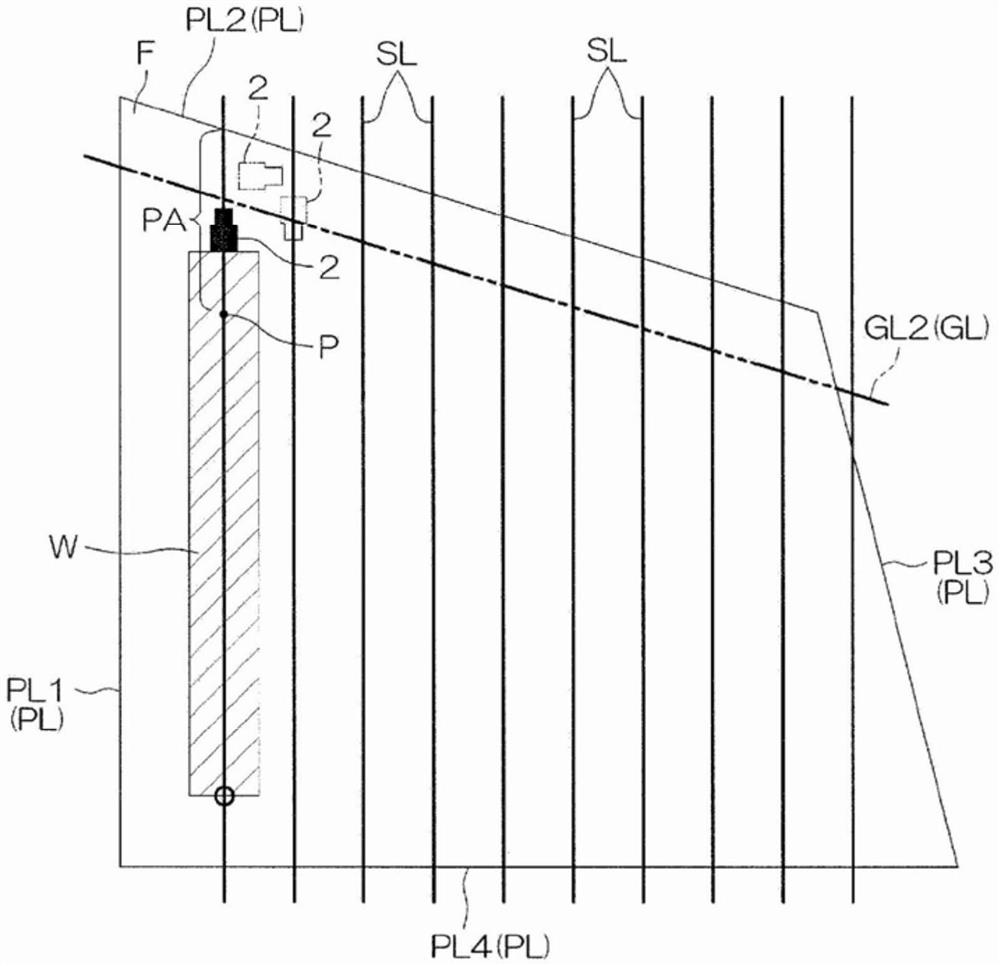
如图5B所示,若作业车辆2进入在外周边PL2设定的外周接近区域PA,则在操作显示部53重叠显示相对于该外周边PL2被设定的引导线GL2。外周接近区域PA是外周接近位置P与外周边PL2之间的区域。外周接近位置P是比引导线GL2远离外周边PL2的位置。在图5B中用双点划线示出转弯过程中的作业车辆2的位置。在作业车辆2的转弯过程中,也继续引导线GL2的显示。引导线GL的颜色与直行导向线SL的颜色不同。
如图5C所示,在作业车辆2在直行导向线SL结束行驶后进行转弯,在开始邻接的直行导向线SL中的直行行驶之后,若脱离外周接近区域PA,则相对于外周边PL2被设定的引导线GL2成为不显示。
相反,如图5D所示,若作业车辆2进入在外周边PL4设定的外周接近区域PA,则在操作显示部53重叠显示相对于该外周边PL4被设定的多个引导线GL。在外周边PL4设定的外周接近区域PA是比引导线GL4远离外周边PL4的外周接近位置P与外周边PL4之间的区域。
如图5E所示,在外周边PL3不与直行导向线SL(外周边PL1)平行的情况下,若作业车辆2接近外周边PL3,则显示与外周边PL3对应的引导线GL3。在图5E所示的图像中,显示与外周边PL2对应的引导线GL2和与外周边PL3对应的引导线GL3双方。引导线GL在对应的每个外周边PL中用不同的颜色显示。在图5E中用双点划线示出位于与外周边PL2对应的引导线GL2和直行导向线SL之间的交点的作业车辆2。
根据该实施方式,田地F的形状、引导线GL、直行导向线SL以及作业车辆2的当前位置重叠显示于操作显示部53。引导线GL与划分田地F的外周边PL平行地延伸。因此,在作业车辆2沿着直行导向线SL自动直行时,若作业者在作业车辆2的当前位置与引导线GL重叠的时机操作方向盘22或者切换开关而解除自动直行,则与田地F的形状无关,均能够使作业车辆2在距田地F的外周边PL恒定距离的位置转弯。因此,能够使作业者识别出合适的转弯的时机。
作业车辆2的当前位置与引导线GL重叠的时机也是作业车辆2到达引导线GL与直行导向线SL的交点的时机。
另外,根据该实施方式,在作业车辆2到达外周边PL的周边的时机显示与该外周边PL对应的引导线GL。因此,能够在操作显示部53显示在使作业车辆2手动转弯的时机所需的引导线GL。因此,能够使作业者更可靠地识别出合适的转弯的时机。
另外,根据该实施方式,若作业车辆2脱离外周接近区域PA,则相对于与该外周接近区域PA对应的外周边PL被设定的引导线GL成为不显示。因此,能够在操作显示部53仅显示在使作业车辆2手动转弯的时机所需的引导线GL。由此,能够容易观察操作显示部53的显示内容。因此,能够使作业者更可靠地识别出合适的转弯的时机。
另外,在该实施方式中,显示于操作显示部53的直行导向线SL的颜色与显示于操作显示部53的引导线GL的颜色不同。因此,能够抑制引导线GL与直行导向线SL的看错。因此,能够使作业者更可靠地识别出合适的转弯的时机。
因此,通过开始作业车辆2的自动直行,能够自动地开始作业机11的作业,若作业者在作业车辆2的当前位置与引导线GL重叠的时机操作方向盘22或者切换开关而解除自动直行,则与田地F的形状无关,均能够在从田地F的外周边PL分离恒定的距离的位置自动地结束作业机11的作业。因此,能够使在直行导向线SL中结束作业的位置对齐在距田地F的外周边PL恒定距离的位置。
另外,如本实施方式那样,在相互对置的外周边PL彼此不是相互平行的四边形形状的情况下,如图5E所示,存在与多个外周边PL(PL2、PL3)对应的引导线GL(GL2、GL3)被显示于操作显示部53的情况。在该情况下,作业者能够选择是否在作业车辆2的当前位置与任意的引导线GL重叠的时机使作业车辆2转弯。因此,能够根据田地F内的地面的状况等适当地选择最佳的引导线GL而使作业车辆2手动转弯。
本发明不限定于以上说明的实施方式,还能够以其他形式进行实施。
例如,如图6所示,也可以在各外周边PL设定有多个引导线GL。在该情况下,作业车辆2进入外周接近区域PA(参照图5B),由此多个引导线GL被显示于操作显示部53。因此,能够根据田地F内的地面的状况等适当地选择最佳的引导线GL而使作业车辆2手动转弯。
此外,能够在权利要求书所记载的范围内进行各种变更。
[发明的附录]
本发明的一个实施方式提供一种行驶辅助系统,包括:引导线设定部,其在田地内设定与划分上述田地的多个外周边分别平行地延伸的多个引导线;直行导向线设定部,其在上述田地内设定相互隔开间隔并平行地延伸的多个直行导向线;行驶控制部,其使行驶车辆沿着上述直行导向线自动直行,根据设置于上述行驶车辆的操作部的操作解除上述自动直行而使上述行驶车辆能够手动转向操纵;以及显示部,其一起重叠显示上述田地的形状、多个上述引导线、多个上述直行导向线以及上述行驶车辆的当前位置。
根据该结构,田地的形状、引导线、直行导向线以及作业车辆的当前位置重叠显示于显示部。引导线与划分田地的外周边平行地延伸。因此,在行驶车辆沿着直行导向线自动直行时,若作业者在行驶车辆的当前位置与引导线重叠的时机操作操作部而解除自动直行,则与田地的形状无关,均能够使行驶车辆在距田地的外周边恒定距离的位置转弯。因此,能够使作业者识别出合适的转弯的时机。
在本发明的一个实施方式中,上述行驶辅助系统还包括显示控制部,若上述行驶车辆进入比上述引导线远离上述外周边的外周接近位置与该外周边侧之间的外周接近区域,则上述显示控制部使相对于该外周边被设定的上述引导线显示于上述显示部。
根据该结构,在行驶车辆到达外周边的周边的时机,显示与该外周边对应的引导线。因此,能够在显示部显示在使行驶车辆手动转弯的时机所需的引导线。因此,能够使作业者更可靠地识别出合适的转弯的时机。
在本发明的一个实施方式中,上述引导线设定部相对于各上述外周边设定多个上述引导线。而且,若上述行驶车辆进入上述外周接近区域,则上述显示控制部使相对于与该外周接近区域对应的上述外周边被设定的多个上述引导线显示于上述显示部。
根据该结构,行驶车辆进入外周接近区域,由此多个引导线被显示于显示部。因此,能够根据田地内的地面的状况等适当地选择最佳的引导线而使行驶车辆手动转弯。
在本发明的一个实施方式中,若上述行驶车辆脱离上述外周接近区域,则上述显示控制部使相对于与该外周接近区域对应的上述外周边被设定的上述引导线成为不显示。因此,能够在显示部仅显示在使行驶车辆手动转弯的时机所需的引导线。由此,能够容易观察显示部的显示内容。因此,能够使作业者更可靠地识别出合适的转弯的时机。
在本发明的一个实施方式中,显示于上述显示部的上述直行导向线的颜色与显示于上述显示部的上述引导线的颜色不同。因此,能够抑制引导线与直行导向线的看错。因此,能够使作业者更可靠地识别出合适的转弯的时机。
在本发明的一个实施方式中,在上述行驶车辆安装有作业机,上述作业机在相对于上述田地进行作业的下位置与不进行相对于上述田地的作业的上位置之间升降。而且,上述行驶辅助系统还包括作业机控制部,上述作业机控制部在上述行驶车辆为上述自动直行过程中时,使上述作业机向上述下位置移动,在解除上述行驶车辆的上述自动直行时,使上述作业机向上述上位置移动。
因此,开始行驶车辆的自动直行,由此能够自动地开始作业机的作业,若作业者在行驶车辆的当前位置与引导线重叠的时机操作操作部而解除自动直行,则与田地的形状无关,均能够在从田地的外周边分离恒定的距离的位置自动地结束作业机的作业。因此,能够使在直行导向线中结束作业的位置对齐在距田地的外周边恒定距离的位置。
- 行驶辅助装置、行驶辅助系统以及行驶辅助方法
- 行驶辅助系统、行驶辅助方法和行驶辅助程序