一种全自动液体样本处理系统及处理方法
文献发布时间:2023-06-19 13:27:45
技术领域
本发明涉及实验仪器的技术领域,特别是指一种全自动液体样本处理系统及处理方法。
背景技术
血液酒精测试流程是:被检测人抽血——采血后立即颠倒180°——重复 5-6次,避免血液凝固——抽取100ul血液样品——抽取500ul叔丁醇水溶液——加入10ml/20ml顶空瓶中——钳口密封——GC检测。
由于血液样品属于生化样品,样品操作处理过程中可能存在感染问题。如新冠肺炎肆虐期间,采集的血液样本可能会对实验操作人员产生病毒感染。因此,操作血液样品时应尽可能避免接触血液样品气溶胶,不可对血液样品进行吹扫等,进行开瓶操作时,需要带好防护设备,或者采用市面售卖的自动开瓶设备进行批量开瓶。操作流程大致采用移液枪缓慢抽取血液样品,加入顶空瓶,通过倾斜移液枪,使针尖挂液能够黏附在顶空瓶壁上,然后用移液枪,吸取叔丁醇水溶液,打入顶空瓶,最后采用钳口器密封顶空瓶。目前市场上类似设备采用的是穿刺针穿刺采血管取样或使用loop空气环+注射器进行移液转移。这两种方案都存在一定的缺陷,使用穿刺针时会使采购管密封没法保证,后续验证时数值偏差较大造成误判,loop空气环+注射器模式由于结构及材料特性,容易出现采液量不准偏差较大的问题。
发明内容
本发明的目的在于克服现有技术的不足,提供一种可保证数值准确性及密封性的同时,可减少人员参与,避免操作人员感染的全自动液体样本处理系统。
为了达成上述目的,本发明的解决方案是:
一种全自动液体样本处理系统,其包括机箱,设置在机箱内的三轴运动模组、扫码模组、摇匀模组、钳盖模组、装拔盖模组、移液枪及电动夹爪;所述机箱上设有顶空瓶放置区、采血管放置区、枪头放置区、排枪区、扫码区、溶液放置区,所述三轴运动模组设置在机箱的一侧,顶空瓶放置区、采血管放置区、枪头放置区、排枪区、扫码区及溶液放置区设置在三轴运动模组的行程范围内,所述扫码模组的扫描头正对扫码区的一侧,摇匀模组设置在机箱上,且位于三轴运动模组的形成范围内,所述钳盖模组包括两轴移动模组及钳盖机构,机箱于钳盖模组的两轴移动模组行程范围内设有钳盖区,所述装拔盖模组设置在钳盖模组一侧的机箱上,所述移液枪及电动夹爪安装在三轴运动模组上,机箱上还设有控制面板。
进一步,所述机箱的外表面设有透明外罩,所述三轴运动模组、扫码模组、摇匀模组、钳盖模组、装拔盖模组、移液枪及电动夹爪罩在透明外罩内,所述控制面板设置在透明外罩的表面。
进一步,所述机箱的顶空瓶放置区设置有两组,其中一组用于放置空瓶,另一组用于放置检测瓶,所述采血管放置区用于放置采血管,枪头放置区用于放置供移液枪使用的枪头,枪头放置区的枪头包括采血枪头及溶液枪头,排枪区设有连通机箱内外的排枪口。
进一步,所述三轴运动模组用于转移顶空瓶、采血管、捡取枪头和用于吸取血液及溶液,其包括设置在机箱后端的支架、设置在支架顶部的X轴滑轨、可滑动的设置在X轴滑轨上的X轴滑块、驱动X轴滑块在X轴滑轨上滑动的X 轴电机、设置在X轴滑块一侧的Y轴滑轨、可滑动的设置在Y轴滑轨上的Y轴滑块、驱动Y轴滑块在Y轴滑轨滑动的Y轴电机、设置在Y轴滑块上的Z轴滑轨、可滑动的设置在Z轴滑轨上的Z轴滑块及驱动Z轴滑块在Z轴滑轨上的 Z轴电机,Y轴滑轨垂直X轴滑轨且朝向机箱的前端设置,所述Z轴滑轨朝下设置在Y轴滑块的底端,所述移液枪及电动夹爪设置在Z轴滑块上,随Z轴滑块同步动作。
进一步,所述摇匀模组设有振动电机及连接振动电机的摇匀座。
进一步,所述钳盖模组的两轴移动模组包括钳盖Y轴移动模组及钳盖Z轴移动模组,所述钳盖机构设置在钳盖Z轴移动模组上。
进一步,所述装拔盖模组包括底板、夹紧固定块、夹紧活动块、夹紧气缸及夹紧感应片,底板固定设置在机箱上,夹紧固定块及夹紧气缸固定设置在底板上,夹紧活动块设置在夹紧气缸的推板上,夹紧感应片设置在夹紧气缸的推板底部。
进一步,所述夹紧固定块及夹紧活动块的相对面分别设有一橡胶垫。
进一步,所述电动夹爪包括平行电爪、夹爪座及夹爪,所述平行电爪的底部设有并排设置的两电爪滑块,两电爪滑块可沿平行电爪上设置的滑轨相互展开或者靠合,两电爪滑块的底部分别连接一夹爪座,电爪座的底部设有所述夹爪。
本发明的另一目的在于克服现有技术的不足,提供一种可保证数值准确性及密封性的同时,可减少人员参与,避免操作人员感染的全自动液体处理方法。
为了达成上述目的,本发明的解决方案是:
一种全自动液体处理方法,其包括以下步骤:
步骤A:启动机台及程序;
步骤B:摆放采血管及顶空瓶;
步骤C:三轴运动模组带动电动夹爪抓取采血管;
步骤D:三轴运动模组带动夹有采血管的电动夹爪至扫码区,扫码模组对采血管进行扫码;
步骤E:三轴运动模组带动夹有采血管的电动夹爪至摇匀模组后松开采血管,摇匀模组对采血管进行摇晃,使静止的血液混匀;
步骤F:三轴运动模组带动电动夹爪抓取顶空瓶至钳盖区;
步骤G:钳盖模组的两轴移动模组带动钳盖机构移动至钳盖区钳住顶空瓶的瓶盖后,带动瓶盖移动至钳盖区的一侧;
步骤H:摇匀模组停止摇匀,三轴运动模组带动电动夹爪至摇匀模组上抓取采血管;
步骤I:三轴运动模组带动夹有采血管的电动夹爪至装拔盖模组,装拔盖模组夹紧采血管;
步骤J:三轴运动模组带动移液枪至枪头放置区取采血枪头;
步骤K:三轴运动模组带动电动夹爪至装拔盖模组并拔出采血管盖;
步骤L:三轴运动模组带动移液枪至采血管上方,移液枪的枪头对采血管进行取液;
步骤M:三轴运动模组带动电动夹爪盖上采血管盖;
步骤N:三轴运动模组带动移液枪移动至钳盖区的顶空瓶上方,并将枪头内的血液排放到顶空瓶;
步骤O:三轴运动模组带动移液枪移动至排枪区,将废枪头排放至排枪口;
步骤P:三轴运动模组带动移液枪移动至枪头放置区取溶液枪头;
步骤Q:三轴运动模组带动移液枪移动至溶液放置区取预设容量的溶液;
步骤R:三轴运动模组带动移液枪移动至钳盖区的顶空瓶上方,并将枪头内的溶液排放到顶空瓶;
步骤S:三轴运动模组带动移液枪移动至排枪区,将废枪头排放至排枪口;
步骤T:钳盖模组的两轴移动模组带动钳盖机构移动至钳盖区,钳盖机构下压对顶空瓶钳盖;
步骤U:三轴运动模组带动电动夹爪抓取顶空瓶并移动至顶空瓶放置区;
重复步骤C至步骤U。
采用上述方案后,本发明全自动液体样本处理系统及处理方法采用移液枪进行采样,保证了移液的准确性,同时通过电动夹爪及装拔盖模组装拔采血管管盖来打开采血管,不破坏盖子的密封性因此能很好的解决因密封性而造成的误差。液体转移到顶空瓶后,又通过钳盖模块进行钳盖,能保证移液后的密闭性同时也减少了人员操作,避免对操作人员的感染,减少操作人员的工作强度,提高生产效率和减少人员操作带来的误差,同时提供取样的准确性及良好的密封性。
附图说明
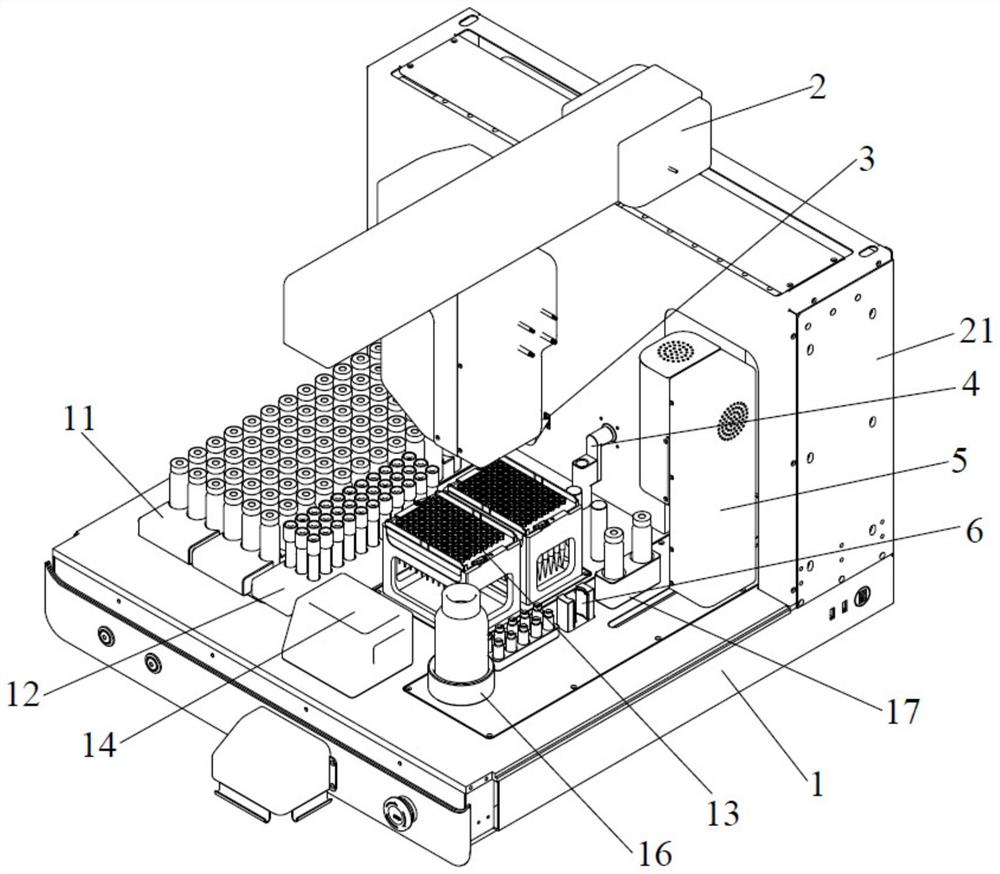
图1为本发明的立体结构示意图。
图2为本发明的俯视示意图。
图3为本发明三轴运动模组的结构示意图。
图4为本发明钳盖模组的结构示意图一。
图5为本发明钳盖模组的结构示意图二。
图6为本发明钳盖机构的结构示意图。
图7为本发明装拔盖模组结构示意图。
图8为本发明电动夹爪及移液枪安装在三轴运动模组的结构示意图。
图9为本发明电动夹爪的结构示意图。
图10为本发明移液枪的结构示意图。
具体实施方式
为了进一步解释本发明的技术方案,下面通过具体实施例来对本发明进行详细阐述。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
如图1至图10所示,本发明揭示了一种全自动液体样本处理系统,其包括机箱1,设置在机箱1内的三轴运动模组2、扫码模组3、摇匀模组4、钳盖模组5、装拔盖模组6、移液枪7及电动夹爪8。所述机箱1上设有顶空瓶放置区 11、采血管放置区12、枪头放置区13、排枪区14、扫码区15、溶液放置区16,所述三轴运动模组2设置在机箱1的一侧,顶空瓶放置区11、采血管放置区12、枪头放置区13、排枪区14、扫码区15及溶液放置区16设置在三轴运动模组2的行程范围内,所述扫码模组3的扫描头正对扫码区15的一侧,摇匀模组4设置在机箱1上,且位于三轴运动模组2的形成范围内,所述钳盖模组5包括两轴移动模组51及钳盖机构52,机箱1于钳盖模组5的两轴移动模组51的行程范围内设有钳盖区17,所述装拔盖模组6设置在钳盖模组5一侧的机箱1上,所述移液枪7及电动夹爪8安装在三轴运动模组2上,机箱1上还设有控制面板17。
本发明全自动液体样本处理系统采用移液枪7进行采样,保证了移液的准确性。同时通过电动夹爪8及装拔盖模组6装拔采血管管盖来打开采血管,不破坏盖子的密封性因此能很好的解决因密封性而造成的误差。液体转移到顶空瓶后,又通过钳盖模块5进行钳盖,能保证移液后的密闭性同时也减少了人员操作,避免对操作人员的感染,减少操作人员的工作强度,提高生产效率和减少人员操作带来的误差,同时提供取样的准确性及良好的密封性。
机箱1的外表面设有透明外罩,所述三轴运动模组2、扫码模组3、摇匀模组4、钳盖模组5、装拔盖模组6、移液枪7及电动夹爪8罩在透明外罩11内,起到防尘的作用,同时也可避免装置在工作过程中受外部因素影响,提高安全性及准确性,所述控制面板17设置在透明外罩的表面,方便操作装置。
机箱1的顶空瓶放置区11设置有两组,其中一组用于放置空瓶,另一组用于放置检测瓶,所述采血管放置区12用于放置采血管,枪头放置区13用于放置供移液枪7使用的枪头,枪头放置区13可根据实际需求进行放置一种或多种尺寸的枪头,排枪区14设有连通机箱1内外的排枪口,用以排出废枪头,在机箱1外的排枪口可通过收纳箱接收排枪口排出的废枪头。溶液放置区16用以放置需要的溶液,例如叔丁醇水溶液等。
所述三轴运动模组2用于转移顶空瓶、采血管、捡取枪头和用于吸取血液及溶液,其包括设置在机箱1后端的支架21、设置在支架21顶部的X轴滑轨 22、可滑动的设置在X轴滑轨22上的X轴滑块23、驱动X轴滑块23在X轴滑轨22上滑动的X轴电机24、设置在X轴滑块23一侧的Y轴滑轨25、可滑动的设置在Y轴滑轨25上的Y轴滑块26、驱动Y轴滑块26在Y轴滑轨25滑动的Y轴电机27、设置在Y轴滑块26上的Z轴滑轨28、可滑动的设置在Z轴滑轨28上的Z轴滑块29及驱动Z轴滑块29在Z轴滑轨28上的Z轴电机210, Y轴滑轨25垂直X轴滑轨22且朝向机箱1的前端设置,所述Z轴滑轨28朝下设置在Y轴滑块26的底端,所述移液枪7及电动夹爪8设置在Z轴滑块29上,可随Z轴滑块29同步动作。
所述扫码模组3读取采血管条形码信息,并与录入系统。
摇匀模组4用于摇匀采血管中静止的血液,摇匀模组4设有振动电机41及连接振动电机41的摇匀座42,摇匀时,将采血管放置在摇匀座42后启动振动电机41进行摇匀。
所述钳盖模组5用以装夹顶空瓶瓶盖,钳盖模组5的两轴移动模组51包括钳盖Y轴移动模组53及钳盖Z轴移动模组54,所述钳盖机构52设置在钳盖Z 轴移动模组54上。
所述装拔盖模组6包括底板61、夹紧固定块62、夹紧活动块63、夹紧气缸 64及夹紧感应片65,底板61固定设置在机箱1上,夹紧固定块62及夹紧气缸 64固定设置在底板61上,夹紧活动块63设置在夹紧气缸64的推板上,夹紧感应片65设置在夹紧气缸的推板底部。
所述夹紧固定块62及夹紧活动块63的相对面分别设有一橡胶垫66,除了可增加夹紧摩擦力,还可保护采血管。
所述移液枪7的底部设有与采血枪头或溶液枪头配合的插头72,移液枪下端成类似圆球形,枪头大都为PTFE材质交软末端有凹槽,使用时只需将移液枪下端往枪头末端向下压即可安装,排枪时移液枪头外围有金属推环,移液枪内部电机带动推环,推出枪头即做的了排枪。
所述电动夹爪8的结构可以有多种,如图9所示,本实施例中,所述电动夹爪8包括平行电爪81、夹爪座82及夹爪83,所述平行电爪81的底部设有并排设置的两电爪滑块84,两电爪滑块84可沿平行电爪81上设置的滑轨相互展开或者靠合,两电爪滑块84的底部分别连接一夹爪座82,电爪座82的底部设有所述夹爪83。使用时,通过平行电爪81控制两夹爪座82及夹爪83相对展开以松开采血管或顶空瓶,两平行电爪81控制两夹爪座82及夹爪83相对靠合可夹紧采血管或顶空瓶。
本发明还揭示了一种全自动液体处理方法,其包括以下步骤:
步骤A:启动机台及程序,在控制面板上设置移液枪需要取血及取液的容量;
步骤B:摆放采血管及顶空瓶;
步骤C:三轴运动模组2带动电动夹爪8抓取采血管;
步骤D:三轴运动模组2带动夹有采血管的电动夹爪8至扫码区15,扫码模组3对采血管进行扫码;
步骤E:三轴运动模组2带动夹有采血管的电动夹爪8至摇匀模组4后松开采血管,摇匀模组4对采血管进行摇晃,使静止的血液混匀;
步骤F:三轴运动模组2带动电动夹爪8抓取顶空瓶至钳盖区17;
步骤G:钳盖模组5的两轴移动模组51带动钳盖机构52移动至钳盖区17 钳住顶空瓶的瓶盖后,带动瓶盖移动至钳盖区17的一侧;
步骤H:摇匀模组4停止摇匀,三轴运动模组2带动电动夹爪8至摇匀模组4上抓取采血管;
步骤I:三轴运动模组2带动夹有采血管的电动夹爪8至装拔盖模组6,装拔盖模组6夹紧采血管;
步骤J:三轴运动模组2带动移液枪7至枪头放置区13取采血枪头;
步骤K:三轴运动模组2带动电动夹爪8至装拔盖模组6并拔出采血管盖;
步骤L:三轴运动模组2带动移液枪7至采血管上方,移液枪7的枪头对采血管进行取液;
步骤M:三轴运动模组2带动电动夹爪8盖上采血管盖;
步骤N:三轴运动模组2带动移液枪7移动至钳盖区17的顶空瓶上方,并将枪头71内的血液排放到顶空瓶;
步骤O:三轴运动模组2带动移液枪7移动至排枪区14,将废枪头排放至排枪口;
步骤P:三轴运动模组2带动移液枪7移动至枪头放置区13取溶液枪头;
步骤Q:三轴运动模组2带动移液枪7移动至溶液放置区16取预设容量的溶液;
步骤R:三轴运动模组2带动移液枪7移动至钳盖区17的顶空瓶上方,并将枪头71内的溶液排放到顶空瓶;
步骤S:三轴运动模组2带动移液枪7移动至排枪区14,将废枪头排放至排枪口;
步骤T:钳盖模组5的两轴移动模组51带动钳盖机构52移动至钳盖区17,钳盖机构52下压对顶空瓶钳盖;
步骤U:三轴运动模组2带动电动夹爪8抓取顶空瓶并移动至顶空瓶放置区11。
重复步骤C至步骤U。
上述实施例和图示并非限定本发明的产品形态和式样,任何所属技术领域的普通技术人员对其所做的适当变化或修饰,皆应视为不脱离本发明的专利范畴。
- 一种全自动液体样本处理系统及处理方法
- 一种样本前处理系统及样本前处理方法