一种老人用防跌倒助行器
文献发布时间:2023-06-19 13:27:45
技术领域
本发明属于助行器技术领域,尤其是涉及一种老人用防跌倒助行器。
背景技术
助行器即辅助人体支撑体重、保持平衡和行走的器具称为助行器。助行器:辅助人体支撑体重、保持平衡和行走的器具称为助行器;助行架支撑面积较大稳定、安全;适用于下肢功能损伤严重的患者站立和行走;
现有的助行器在使用的时候,老人锻炼行径的地面上可能会存有一些石块,助行器经过时,助行器上的走轮容易轧上这些石块,导致助行器向一侧倾斜,致使助行器以及老人倾倒,造成老人被摔伤,老人摔倒之后助行器无法很好的对其进行制止,之后老人速度过快助行器也不会进行制止,从而容易发生危险,老人在使用时会出现劳累的情况,将助行器停下之后没办法及时得到休息,且现有的助行器功能较为单一。
发明内容
本发明为了克服现有技术的不足,提供一种可以更好的保证老人安全和防止老人摔倒的老人用防跌倒助行器。
为了实现上述目的,本发明采用以下技术方案:一种老人用防跌倒助行器,包括第一支架、设于第一支架下方用于支撑第一支架进行移动的支撑件、设于第一支架上方用于支撑老人身体的第二支架、连接于第一支架和第二支架用于带动第二支架进行升降的电动杆、设于第二支架中间用于支撑第二支架的第一伸缩杆、设于支撑件上方用于保证助行器不会倾倒的防倒组件、设于后方支撑件上用于制动的制动组件、设于制动组件上方并与第一支架连接用于坐下休息的座椅组件、设于第一伸缩杆内部并连接于支撑件和座椅组件用于控制支撑件和座椅组件的控制组件;所述支撑件有多个,前后各两个;所述支撑件主要是可以转动的轮子;其特征在于:所述控制组件包括设于第二支架内部可用于按压的按压块、固定设于按压块下方的第二伸缩杆、设于第二伸缩杆下方的连接板、连接于连接板用于使按压块位移放大的绳索控制组件、固定设于第一伸缩杆内部的第二导向板、设于第二导向板上方的控制组件第一转轴、固定设于第二伸缩杆上并滑动设于第一伸缩杆内部的第三固定板、连接于绳索控制组件的第三绳索、设于第三绳索下方的第二配重块、设于第二配重块下方的升降板、连接于第二配重块用于锁住支撑件的锁轮组件;所述防倒组件包括固定连接于第二支架的第一圆盘、连接于第一圆盘的第一绳索、固定设于第一支架上的第二圆盘、铰接于第二圆盘的第一连杆、铰接于第一连杆中间位置并与第一绳索固定连接的驱动圆盘、固定设于支撑件上方用于连接支撑件的第三圆盘、滑动设于第三圆盘下方并与第一连杆铰接用于防止第一支架倾斜的支撑脚;所述支撑脚有多个成圆形设于支撑件的周围;在使用该设备时,支撑件是被锁轮组件卡住位置无法进行旋转的,支撑件通过滚轮架进行支撑,之后老人将手搭在第二支架上,之后也就是将身体的重量放在第二支架上,之后按压块会受到来自第二支架的重力被压缩,之后按压块回通过第二伸缩杆带动锁轮组件运动,使锁轮组件不再卡住支撑件,从而支撑件可以进行自由的运动,这时老人可以推动该助行器进行运动,当老人的手离开时,可以使其快速卡住位置,不再进行运动,从而可以更好的保证老人的安全,避免由于地形以及由于惯性,当老人的手离开助行器不想继续行走时助行器不能立刻停止的问题,从而可以更好的根据老人的意愿使其进行停止和移动,之后当助行器的速度过快,会影响到老人的人身安全时,制动组件回根据速度的快慢进行制动,从而使该助行器的运动速度不会太快,进一步的保证了老人使用时的安全,之后通过电动杆可以根据老人的身高对其进行调解高度,石老人可以根据自己的需求更好的进行使用,并且老人使用助行器时会出现跌倒的现象,跌倒可能会向前和向后跌倒,当跌倒时,会使助行器快速进行运动,从而通过制动组件对其进行制动,使助行器可以对老人进行支撑,防止老人跌倒,更好的保证了老人的安全,之后当老人由于地形带动助行器一起跌倒,使助行器倾斜时,可以通过支撑脚支撑住底面,从而增加了与底面的支撑范围,使助行器可以更加的平稳,从而可以防止助行器会发生侧翻的现象,从而可以更好的保证老人的安全,当老人走路累了,可以通过手离开助行器的方式使其进行停止,并在停止之后座椅组件回提供座椅,使老人可以坐下休息,更好的提高了使用效果和健康安全的效果。
具体的,所述第一绳索固接于第一圆盘;所述第一绳索穿过第二圆盘与第二圆盘滑动连接;所述驱动圆盘固接于第一绳索;所述防倒组件还包括固定设于第二圆盘下方的第四支撑板、转动设于第四支撑板中的第一销轴、所述第一连杆固接于第一销轴、固定设于驱动圆盘上的第五支撑板;设于第三圆盘中的第三滑槽、固定设于第五支撑板上的第二销轴、第二销轴滑动设于第二滑槽中、设于支撑脚中的第四滑槽、固定设于第一连杆上的第三销轴、固定设于第三圆盘下方的防倒组件第一绳索、固定连接于支撑脚并滑动设于防倒组件第一绳索中的防倒组件第二圆盘;所述第三销轴滑动连接于第四滑槽;所述第三滑槽与所述第一连杆配合;所述支撑脚下方设有支脚;所述支脚的高度会高于支撑件;在使用时,当助行器发生侧翻时,支撑脚上的支脚会接触到地面,之后使助行器受到支撑力,避免助行器会倾斜之后发生侧翻,从而更好的保证了老人在使用时的安全性,之后老人的身高发生变化时,需要对第二支架的高度进行调节,之后第二支架的高度升高时就会导致助行器的重心升高,从而同样发生倾斜时,需要在倾斜角度更小的时候对其进行支撑,防止侧翻力过大,但是在不使用时支撑脚如果去适应助行器最大高度进行设置又会占用很大的空间,不利于放在家中,之后第二支架的高度进行调节,会带动第一圆盘向上运动,之后通过第二圆盘和第一连杆回带动多个支撑脚朝着第三圆盘离心的方向进行运动,之后会使支撑脚向外展开,也就是使支撑脚支撑的面积增加,从而可以更好的保证不同身高的人群进行使用的同时还可以在不进行使用时可以将第二支架的高度调到最低,从而使支撑脚收回来,更好的减少占地的空间,利于收纳。
具体的,所述锁轮组件包括固定设于升降板下方的第六连杆、固定设于滚轮架的第四导向杆、滑动设于第四导向杆上的第三滑动块、铰接于第六连杆和第三滑动块的第七连杆、固定设于第三滑动块上的摩擦板、固定设于第三滑动块下方的延伸板件、滑动设于延伸板件中的第五导向杆、固定设于第五导向杆上的卡位杆、设于卡位杆和延伸板件之间的第三弹簧、设于第五导向杆另一端用于卡住位置的卡位板、设于支撑件上的多个卡位槽;当不进行使用该助行器时,卡位杆嵌入在卡位槽中,摩擦板压在支撑件上,从而使支撑件进行固定住位置,防止助行器发生移动,也就是在老人行走到一半累了之后可以使助行器可停下,更好的保证老人安全,之后老人使用时,只需要手放在第二支架上,之后摩擦板和卡位杆都会远离支撑件进行运动,从而可以更好的保证助行器在使用时可以正常运行,在不想使用时可以立刻停止,更好的保证老人使用的安全性。
具体的,所述制动组件包括固定设于第一转轴上的第四圆盘、设于第四圆盘中的多个第一滑槽、设于第四圆盘上并与第一滑槽配合的多个离心部件、连接于离心部件的驱动部件、固定设于第一转轴上的摩擦盘、连接于驱动部件并与摩擦盘配合用于对摩擦盘进行制动的制动部件;第四圆盘转速变快会使与第一滑槽配合的离心部件由于重力的原因使离心力增加,之后会通过离心部件与驱动部件配合带动制动部件运动,制动部件对摩擦盘进行制动,从而实现了支撑件的转速过快对其进行制动减速,使助行器的速度可以更好地慢下来,不会任由老人快速推动,从而可以更好的保证了老人的行走的稳定性和安全性,通过制动使老人慢速行走,之后当老人摔倒时,老人会由于害怕紧握住第二支架,从而会导致锁轮组件无法对支撑件进行制动,之后老人摔倒助行器的运行速度必然会增加,从而也就是第一转轴的转速增加,从而可以通过制动部件对摩擦盘的制动使支撑件进行减速,从而可以使助行器无论什么情况都不会进行快速移动,从而可以更好的防止老人摔倒,更好的保护老人的安全。
具体的,所述制动部件包括连接于驱动部件的横梁板、固定设于滚轮架上的两个第三支撑板、固定设于两个第三支撑板之间的第二导向杆、横梁板滑动连接于第二导向杆、固定设于横梁板下方的第一支撑杆、固定设于第一支撑杆下方的连接块、固定设于连接块下方的摩擦弧块、固定设于摩擦弧块中间的摩擦凸起;支撑件的转速变快会在离心部件和座位控制部件的作用下使横梁板向下运动,之后横梁板在第二导向杆上进行滑动,通过第一支撑杆带动连接块向下运动,只会摩擦弧块会压在摩擦盘上,摩擦弧块是弧形的,会有更多的表面面积与摩擦盘接触,从而可以通过增加摩擦弧块和摩擦盘的接触面积增加摩擦力,从而可以更好的增加使支撑件停止转动的力,之后摩擦弧块向下运动与摩擦盘接触之后摩擦凸起还会与摩擦盘接触,从而可以更好的利用两侧的摩擦弧块对摩擦盘进行摩擦减速,具体解释如下,摩擦弧块的弧度是略小于摩擦盘的,从而摩擦弧块接触到摩擦盘会发生变形,之后摩擦弧块中间部发生弯曲并不会与摩擦盘接触,之后摩擦弧块的两侧会与摩擦盘进行接触,之后由于摩擦的作用,使摩擦盘转动受阻,从而使其停下来,之后当第一转轴带动摩擦盘的转速过快时,会通过离心部件和座位控制部件使摩擦弧块向下运动的距离更多,从而摩擦弧块向下运动的距离是由支撑件的转速来决定的,之后摩擦弧块两侧会与摩擦盘摩擦减速,时间久了容易磨损,使摩擦弧块的两侧会变薄,之后两侧在摩擦时是会向上进行运动的,从而使两侧更多的与摩擦盘接触,所以摩擦弧块的中间部是需要支撑两侧进行变形的,并且要保证两侧变形的疲劳强度和韧性足够高,之后也就是摩擦弧块中间部不能受到磨损,从而更好的保证中间部的厚度不会发生变化,从而当摩擦弧块向下运动,摩擦弧块中间部需要接触到摩擦盘时会有摩擦弧块中间位置的摩擦凸起压在摩擦盘上,之后摩擦凸起对摩擦盘进行摩擦减速,增加制动的效果,从而可以当支撑件转速过快可以对其进行更好的制动的同时更好的保证了制动效果的使用寿命,更好的保证了助行器使用的安全性。
具体的,所述离心部件包括固定设于第四圆盘上的第一支撑板、固定设于第一支撑板上的第三伸缩杆、固定设于第三伸缩杆上并滑动设于第一滑槽中的第一配重块、设于第一配重块和第一支撑板之间的第一弹簧;所述驱动部件包括固定设于滚轮架上的第二支撑板、固定设于两个第二支撑板之间的第一导向杆、滑动设于第一导向杆上的第一滑动块、固接于第一滑动块的第一滑动板、设于第二支撑板和第一滑动块之间的第二弹簧、铰接于第一滑动板的第二连杆、铰接于第二连杆的升降块;所述升降块固接于横梁板;所述第二弹簧和所述第一弹簧分别用于使第一滑动块和第一配重块进行复位;当支撑件转速过快会带动第四圆盘转速增加,之后第四圆盘上的第一配重块会受到离心力的作用进行离心方向的运动,从而第一滑槽上的第一配重块会向四周展开,之后第一配重块是设置了四个的,从而四个第一配重块展开后所在的位置形成的圆的直径增加,之后第一配重块会通过第一滑动块带动横梁板向下运动,从而摩擦弧块会对摩擦盘进行制动,之后当摩擦弧块对摩擦盘制动使摩擦盘减速,从而会使第一转轴减速,第一滑槽减速,第一滑槽减速之后第一配重块受到的离心力变小,就会从展开的状态开始复原,回到原位后不会与第一滑动块配合,从而第一滑动块通过第二连杆使摩擦弧块复位,之后不再对摩擦盘进行制动,之后助行器在摩擦盘速度降低时也会降低速度,但是助行器会有惯性,从而会在惯性的作用下使助行器的速度再次提高,之后支撑件的转速再次提高,之后再通过同样的方法对助行器进行制动,如此往复直到消除助行器的惯性并使助行器速度降低为止,从而可以通过多次制动的形式形成点刹,使助行器停止的过程是每次减速一点,分多次进行减速,从而不会使老人由于助行器突然停止,之后老人在自身惯性的作用下与助行器发生碰撞,从而更好的表面老人与助行器发生磕碰,从而更好的保护了老人,提高了助行器防跌倒的安全性。
具体的,所述座椅组件包括转动设于第一支架上的挡板、设于挡板中的第一凹腔、转动设于第一凹腔中的第二转轴、固定设于第二转轴上的座椅支撑板、设于座椅支撑板上的缺口,设于缺口中用于使座椅支撑板进行复位的扭动件、连接于绳索控制组件的第二绳索、连接于第二绳索和座椅支撑板用于驱动座椅支撑板向下翻转的座位控制部件;当第二支架没有被按压时,支撑件是被锁住的,并且座椅支撑板是与挡板保持垂直的,从而可以使座椅支撑板提供座椅的作用供老人进行休息,之后当第二支架被按压,老人需要使用助行器时,第二绳索会在绳索控制组件的作用下带动座位控制部件进行运动,从而通过座位控制部件使座椅支撑板进行翻转,从而会使座椅支撑板嵌入进第一凹腔中,之后座椅支撑板不会影响老人使用助行器时正常走路的步伐,从而也就是不会挡住老人走路,之后使老人可以停下休息的同时还不会影响老人的正常使用,之后挡板是转动连接于第一支架的,挡板中设有电磁铁,可以使挡板位置固定住,当老人需要打开挡板离开助行器时,按压按钮使挡板打开,从而通过挡板的关闭提供对老人的保护作用。
具体的,所述座位控制部件包括固定设于第一凹腔上的第二固定板、铰接于第二固定板的第三连杆、铰接于第三连杆的第二滑动块、固定设于座椅支撑板下方的第一固定板、固定宁设于第一固定板上的第三导向杆、固定连接于第三连杆的旋转盘;所述旋转盘连接于第二绳索、所述第二滑动块滑动连接于第三导向杆;所述第二绳索绕于旋转盘上;当第二支架被按压时,第二绳索会拉动旋转盘进行逆时针旋转,通过第三连杆带动座椅支撑板翻转,嵌入进第一凹腔中,之后第二支架不被按压时,会通过扭动件的作用使座椅支撑板进行复位,座椅支撑板与第一凹腔垂直时,第二滑动块会抵在第一固定板上,之后第二滑动块无法在座椅组件凹槽上进行滑动,从而也就对座椅支撑板进行固定,从而可以使座椅支撑板更好的支撑住老人的重量,通过第三连杆、第一凹腔、座椅支撑板之间的三角形,提高支撑的稳定性。
具体的,所述绳索控制组件包括铰接于连接板的第四连杆、转动连接于第四连杆的第一滚轮、固定连接于第一滚轮的齿轮、固定设于第一支架内部并啮合于齿轮的齿条、铰接于第四连杆的第五连杆、铰接于第五连杆的第二滚轮、固定设于第二滚轮上的绳索绕盘、绕在第一滚轮和第二滚轮上的传动带;连接板向下运动会通过第四连杆带动第一滚轮进行运动,之后齿轮和齿条的配合会使第一滚轮进行旋转,之后第一滚轮通过第五连杆带动第二滚轮和第一滚轮一起进行运动,之后第一滚轮通过传动带使第二滚轮也进行转动,传动带传动比为第一支架:第一支架,之后第二绳索是绕在第二滚轮上的,第三绳索也是绕在第二滚轮上的,齿轮旋转和运动会使第三绳索倍松开,第二绳索被拉紧,从而实现支撑件法人制动和座椅支撑板的收起,之后通过第二滚轮法人移动增加拉拉紧和松开的程度,之后第二滚轮的直径大于第一滚轮的直径进一步增加拉紧和松开的程度,从而更好的使助行器运行更加稳定。
具体的,所述控制组件还包括设于第一伸缩杆上的第一伸缩部第一支架、设于第二伸缩杆上的第二伸缩部、固接于第二伸缩杆和第一伸缩杆的固定圆环块;所述第一伸缩部和所述第二伸缩部处于同一高度;所述第二支架上设有橡胶套;所述橡胶套是软材质的;所述橡胶套中设有容纳按压块的凹槽;所述橡胶套可以通过软材质使老人的手可以更加舒服,之后电动杆会带动第二支架的位置进行调节,之后第一伸缩杆的长度也会发生变化,通过第一伸缩部处实现变化,之后第二伸缩杆也会变化,通过第二伸缩部实现,之后第一伸缩部上方被拉伸,会通过第二伸缩杆电动杆带动第二伸缩杆长度也被拉伸,之后第二伸缩部处设有电磁铁,当需要第二伸缩部处对第二伸缩杆进行伸长时,电磁铁不会工作,伸长之后电磁铁会使第二伸缩部卡住位置,所述第一伸缩杆和所述第二伸缩杆都是两段伸缩杆;所述第一伸缩部和所述第二伸缩部使两段的交接处使其进行伸缩的位置。
综上所述,本发明通过设置了制动组件可以对助行器进行过快制动,更好的保证了老人使用时的安全性;设置了电动杆和第一伸缩杆、可以根据老人的不同需求对助行器的高度进行调解;设置了防倒组件,可以根据助行器不同的高度对助行器进行不同程度的防侧翻;设置了座椅组件可以在老人劳累时为老人提供休息;设置了第二支架和控制组件,可以在助行器不使用时进行制动;本发明通过对助行器防止过快的发生来预防老人的摔倒。
附图说明
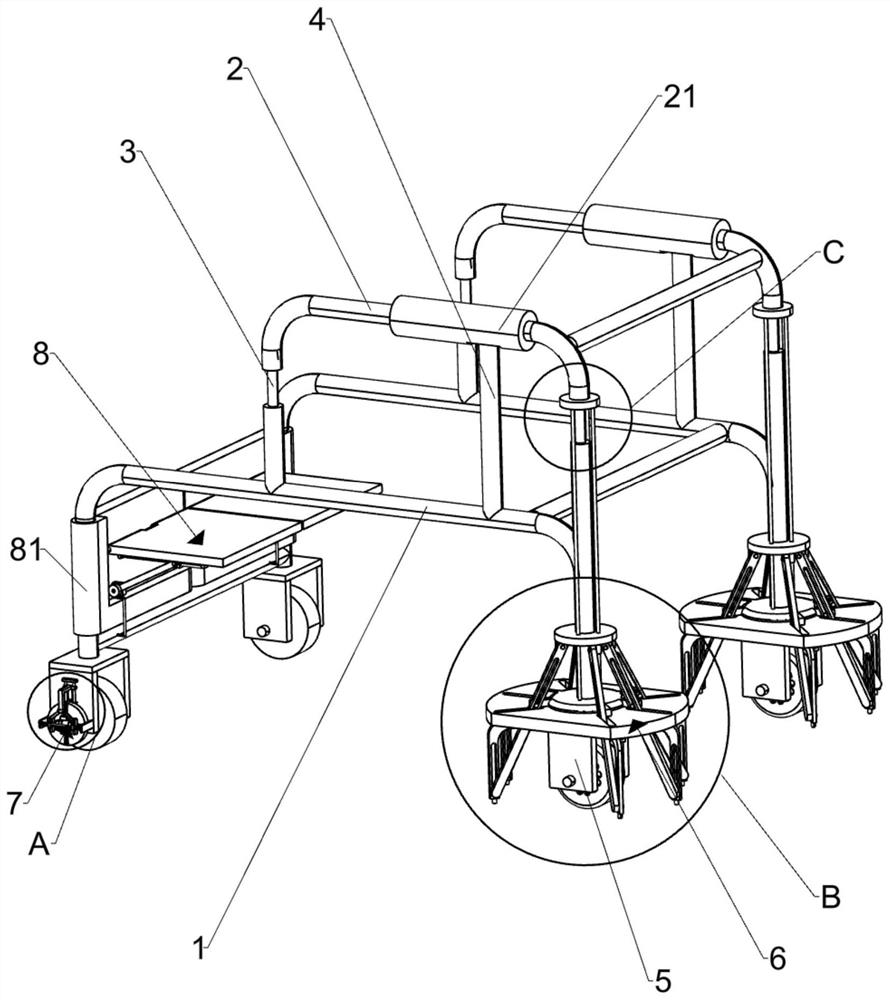
图1为本发明的结构示意图;
图2为本发明图1中A的放大图;
图3为本发明图1中B的放大图;
图4为本发明图1中C的放大图;
图5为本发明中防倒组件的结构示意图;
图6为本发明中座椅组件的结构示意图;
图7为本发明中制动组件的结构示意图;
图8为本发明图7中D的放大图;
图9为本发明中座位控制部件的结构示意图;
图10为本发明中绳索控制组件的结构示意图;
图11为本发明中锁轮组件的正视结构示意图;
图12为本发明中锁轮组件的侧视结构示意图;
图13为本发明中卡位杆的结构示意图;
图14为本发明中传动带的结构示意图;
图15为本发明中M-M的位置示意图;
图16为本发明中M-M的剖视结构示意图;
图17为本发明图16中E的放大图;
图18为本发明图16中F的放大图;
图19为本发明图16中G的放大图;
图20为本发明图16中H的放大图;
图21为本发明图16中J的放大图;
具体实施方式
为了使本技术领域的人员更好的理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述。
实施例一
如图所示,一种老人用防跌倒助行器包括第一支架1、设于第一支架1下方用于支撑第一支架1进行移动的支撑件5、设于第一支架1上方用于支撑老人身体的第二支架2、连接于第一支架1和第二支架2用于带动第二支架2进行升降的电动杆3、设于第二支架2中间用于支撑第二支架2的第一伸缩杆4、设于支撑件5上方用于保证助行器不会倾倒的防倒组件6、设于后方支撑件5上用于制动的制动组件7、设于制动组件7上方并与第一支架1连接用于坐下休息的座椅组件8、设于第一伸缩杆4内部并连接于支撑件5和座椅组件8用于控制支撑件5和座椅组件8的控制组件9;所述支撑件5有多个,前后各两个;所述支撑件5主要是可以转动的轮子;其特征在于:所述控制组件9包括设于第二支架2内部可用于按压的按压块91、固定设于按压块91下方的第二伸缩杆92、设于第二伸缩杆92下方的连接板921、连接于连接板921用于使按压块91位移放大的绳索控制组件96、固定设于第一伸缩杆4内部的第二导向板95、设于第二导向板95上方的控制组件9第一转轴51、固定设于第二伸缩杆92上并滑动设于第一伸缩杆4内部的第三固定板94、连接于绳索控制组件96的第三绳索97、设于第三绳索97下方的第二配重块98、设于第二配重块98下方的升降板981、连接于第二配重块98用于锁住支撑件5的锁轮组件99;所述防倒组件6包括固定连接于第二支架2的第一圆盘61、连接于第一圆盘61的第一绳索62、固定设于第一支架1上的第二圆盘63、铰接于第二圆盘63的第一连杆64、铰接于第一连杆64中间位置并与第一绳索62固定连接的驱动圆盘67、固定设于支撑件5上方用于连接支撑件5的第三圆盘65、滑动设于第三圆盘65下方并与第一连杆64铰接用于防止第一支架1倾斜的支撑脚66;所述支撑脚66有多个成圆形设于支撑件5的周围;在使用该设备时,支撑件5是被锁轮组件99卡住位置无法进行旋转的,支撑件5通过滚轮架进行支撑,之后老人将手搭在第二支架2上,之后也就是将身体的重量放在第二支架2上,之后按压块91会受到来自第二支架2的重力被压缩,之后按压块91回通过第二伸缩杆92带动锁轮组件99运动,使锁轮组件99不再卡住支撑件5,从而支撑件5可以进行自由的运动,这时老人可以推动该助行器进行运动,当老人的手离开时,可以使其快速卡住位置,不再进行运动,从而可以更好的保证老人的安全,避免由于地形以及由于惯性,当老人的手离开助行器不想继续行走时助行器不能立刻停止的问题,从而可以更好的根据老人的意愿使其进行停止和移动,之后当助行器的速度过快,会影响到老人的人身安全时,制动组件7回根据速度的快慢进行制动,从而使该助行器的运动速度不会太快,进一步的保证了老人使用时的安全,之后通过电动杆3可以根据老人的身高对其进行调解高度,石老人可以根据自己的需求更好的进行使用,并且老人使用助行器时会出现跌倒的现象,跌倒可能会向前和向后跌倒,当跌倒时,会使助行器快速进行运动,从而通过制动组件7对其进行制动,使助行器可以对老人进行支撑,防止老人跌倒,更好的保证了老人的安全,之后当老人由于地形带动助行器一起跌倒,使助行器倾斜时,可以通过支撑脚66支撑住底面,从而增加了与底面的支撑范围,使助行器可以更加的平稳,从而可以防止助行器会发生侧翻的现象,从而可以更好的保证老人的安全,当老人走路累了,可以通过手离开助行器的方式使其进行停止,并在停止之后座椅组件8回提供座椅,使老人可以坐下休息,更好的提高了使用效果和健康安全的效果。
具体的,所述第一绳索62固接于第一圆盘61;所述第一绳索62穿过第二圆盘63与第二圆盘63滑动连接;所述驱动圆盘67固接于第一绳索62;所述防倒组件6还包括固定设于第二圆盘63下方的第四支撑板641、转动设于第四支撑板641中的第一销轴642、所述第一连杆64固接于第一销轴642、固定设于驱动圆盘67上的第五支撑板671;设于第三圆盘65中的第三滑槽651、固定设于第五支撑板671上的第二销轴644、第二销轴644滑动设于第二滑槽643中、设于支撑脚66中的第四滑槽661、固定设于第一连杆64上的第三销轴645、固定设于第三圆盘65下方的防倒组件6第一绳索62、固定连接于支撑脚66并滑动设于防倒组件6第一绳索62中的防倒组件6第二圆盘63;所述第三销轴645滑动连接于第四滑槽661;所述第三滑槽651与所述第一连杆64配合;所述支撑脚66下方设有支脚;所述支脚的高度会高于支撑件5。
具体的,所述锁轮组件99包括固定设于升降板981下方的第六连杆991、固定设于滚轮架的第四导向杆992、滑动设于第四导向杆992上的第三滑动块993、铰接于第六连杆991和第三滑动块993的第七连杆994、固定设于第三滑动块993上的摩擦板997、固定设于第三滑动块993下方的延伸板件996、滑动设于延伸板件996中的第五导向杆9981、固定设于第五导向杆9981上的卡位杆998、设于卡位杆998和延伸板件996之间的第三弹簧9983、设于第五导向杆9981另一端用于卡住位置的卡位板9982、设于支撑件5上的多个卡位槽995。
具体的,所述制动组件7包括固定设于第一转轴51上的第四圆盘71、设于第四圆盘71中的多个第一滑槽711、设于第四圆盘71上并与第一滑槽711配合的多个离心部件72、连接于离心部件72的驱动部件73、固定设于第一转轴51上的摩擦盘75、连接于驱动部件73并与摩擦盘75配合用于对摩擦盘75进行制动的制动部件74。
具体的,所述制动部件74包括连接于驱动部件73的横梁板741、固定设于滚轮架上的两个第三支撑板742、固定设于两个第三支撑板742之间的第二导向杆743、横梁板741滑动连接于第二导向杆743、固定设于横梁板741下方的第一支撑杆744、固定设于第一支撑杆744下方的连接块745、固定设于连接块745下方的摩擦弧块746、固定设于摩擦弧块746中间的摩擦凸起747。
具体的,所述离心部件72包括固定设于第四圆盘71上的第一支撑板721、固定设于第一支撑板721上的第三伸缩杆722、固定设于第三伸缩杆722上并滑动设于第一滑槽711中的第一配重块724、设于第一配重块724和第一支撑板721之间的第一弹簧723;所述驱动部件73包括固定设于滚轮架上的第二支撑板731、固定设于两个第二支撑板731之间的第一导向杆732、滑动设于第一导向杆732上的第一滑动块734、固接于第一滑动块734的第一滑动板735、设于第二支撑板731和第一滑动块734之间的第二弹簧733、铰接于第一滑动板735的第二连杆736、铰接于第二连杆736的升降块737;所述升降块737固接于横梁板741;所述第二弹簧733和所述第一弹簧723分别用于使第一滑动块734和第一配重块724进行复位。
具体的,所述座椅组件8包括转动设于第一支架1上的挡板81、设于挡板81中的第一凹腔811、转动设于第一凹腔811中的第二转轴821、固定设于第二转轴821上的座椅支撑板82、设于座椅支撑板82上的缺口,设于缺口中用于使座椅支撑板82进行复位的扭动件、连接于绳索控制组件96的第二绳索84、连接于第二绳索84和座椅支撑板82用于驱动座椅支撑板82向下翻转的座位控制部件83。
具体的,所述座位控制部件83包括固定设于第一凹腔811上的第二固定板835、铰接于第二固定板835的第三连杆834、铰接于第三连杆834的第二滑动块833、固定设于座椅支撑板82下方的第一固定板831、固定宁设于第一固定板831上的第三导向杆832、固定连接于第三连杆834的旋转盘836;所述旋转盘836连接于第二绳索84、所述第二滑动块833滑动连接于第三导向杆832;所述第二绳索84绕于旋转盘836上。
具体的,所述绳索控制组件96包括铰接于连接板921的第四连杆961、转动连接于第四连杆961的第一滚轮962、固定连接于第一滚轮962的齿轮966、固定设于第一支架1内部并啮合于齿轮966的齿条963、铰接于第四连杆961的第五连杆967、铰接于第五连杆967的第二滚轮964、固定设于第二滚轮964上的绳索绕盘965、绕在第一滚轮962和第二滚轮964上的传动带。
具体的,所述控制组件9还包括设于第一伸缩杆4上的第一伸缩部41第一支架1、设于第二伸缩杆92上的第二伸缩部922、固接于第二伸缩杆92和第一伸缩杆4的固定圆环块93;所述第一伸缩部41和所述第二伸缩部922处于同一高度;所述第二支架2上设有橡胶套21;所述橡胶套21是软材质的;所述橡胶套21中设有容纳按压块91的凹槽22;所述橡胶套21可以通过软材质使老人的手可以更加舒服,之后电动杆3会带动第二支架2的位置进行调节,之后第一伸缩杆4的长度也会发生变化,通过第一伸缩部41处实现变化,之后第二伸缩杆92也会变化,通过第二伸缩部922实现,之后第一伸缩部41上方被拉伸,会通过第二伸缩杆92电动杆3带动第二伸缩杆92长度也被拉伸,之后第二伸缩部922处设有电磁铁,当需要第二伸缩部922处对第二伸缩杆92进行伸长时,电磁铁不会工作,伸长之后电磁铁会使第二伸缩部922卡住位置,所述第一伸缩杆4和所述第二伸缩杆92都是两段伸缩杆;所述第一伸缩部41和所述第二伸缩部922使两段的交接处使其进行伸缩的位置。
实施例二
当老人需要使用助行器进行运动时:
老人的手搭在橡胶套21傻瓜,之后身体的重力会压在橡胶套21上,之后橡胶套21回带动按压块91向下进行运动,按压块91带动第二伸缩杆92向下进行运动,之后第二伸缩杆92带动第三固定板94向下运动,第二导向板95会压缩控制组件9第一转轴51,控制组件9第一转轴51在橡胶套21失去压力之后使按压块91进行复位,第二伸缩杆92带动连接板921向下,连接板921回带动第四连杆961,之后第四连杆961回带动第一滚轮962进行运动,第一滚轮962通过第五连杆967带动第二滚轮964一起进行运动,之后第一滚轮962在运动时齿轮966会与齿条963配合,从而齿轮966旋转带动第一滚轮962旋转,第一滚轮962通过绕在第一滚轮962和第二滚轮964转轴上的传动带带动第二滚轮964进行运动,之后第二滚轮964带动绳索绕盘965进行旋转,绳索绕盘965会通过旋转将绕在绳索绕盘965上的第三绳索97进行向外放,之后第二配重块98不再受到第三绳索97的拉力,会在重力的作用下向下运动,带动升降板981向下运动,升降板981带动第六连杆991向下运动,第六连杆991通过第七连杆994带动第三滑动块993在第四导向杆992上进行滑动,使两个第三滑动块993相互远离,从而摩擦板997不再压在支撑件5上,之后第三滑动块993带动延伸板件996一起进行运动,延伸板件996通过卡位板9982带动第五导向杆9981向外侧运动,第五导向杆9981带动卡位杆998不再卡住卡位槽995,从而这时支撑件5可以正常旋转,可以正常进行使用该助行器;
实施例三:
当老人不需要使用助行器进行运动时:老人的手离开橡胶套21,之后第二伸缩杆92会在控制组件9第一转轴51推动第三固定板94的作用下使按压块91进行复位,也就是会使第二伸缩杆92复位,第二伸缩杆92通过绳索控制组件96,与实施例二中相同的运动原理,相反的运动方式,是的第二配重块98向上运动,之后会通过第六连杆991带动第七连杆994运动使卡位槽995压在支撑件5上,对支撑件5进行制动,之后第三滑动块993也会运动,会带动延伸板件996通过第三弹簧9983使卡位杆998进行运动,之后卡位杆998贴在支撑件5上,当支撑件5上的卡位槽995转动过来卡位杆998会在第三弹簧9983的作用下卡进去,对其进行固定,使支撑件5无法进行旋转;
实施例四
当助行器速度过快老人由于害怕手没有离开橡胶套21时:
四度过快也就是支撑件5的转速过快,也就是第一转轴51的转速过快,从而第一转轴51会带动第四圆盘71进行快速转动,之后会使第一滑槽711中的第一配重块724受到的离心力增加,之后第一配重块724会向四周进行甩出,第三伸缩杆722回进行收缩对第一配重块724进行导向,之后多个第一配重块724组成的圆形的直径会增加,从而会在第四圆盘71转动时撞击到第一滑动板735,使第一滑动板735进行离心方向的运动,之后第一滑动板735回通过第二连杆736带动升降块737向下进行运动,升降块737带动横梁板741向下运动,横梁板741在第二导向杆743的导向下进行运动,之后横梁板741带动第一支撑杆744向下运动,第一支撑杆744通过连接块745带动摩擦弧块746向下运动,摩擦凸起747和摩擦弧块746一起向下运动,之后摩擦凸起747和摩擦弧块746会压在摩擦盘75上,增加摩擦盘75受到的摩擦力,对摩擦盘75进行制动,之后一次制动会使摩擦盘75速度降低,之后第一配重块724在第一弹簧723的作用下进行复位,之后摩擦弧块746不再对摩擦盘75进行制动,之后摩擦盘75由于助行器的惯性会再次增加速度,之后又会重复上述的运动过程对摩擦盘75再次进行制动,从而达到点刹的效果,使助行器可以在点刹的作用下停下来,更好的保护老人
实施例五
当老人跌倒会使助行器发生侧翻时:
发生侧翻时会翻转一定角度之后支撑脚66上的脚柱与地面进行接触,从而防止助行器继续进行侧翻。
实施例六:
当老人需要对第二支架2的高度进行调解时,可以通过电动杆3控制第二支架2的上升和下降,之后当第二支架2的高度变化,会使该助行器的中心发生变化,从而需要对防倒组件6进行调解,使防倒组件6针对不同的中心都可以更好的进行防止侧翻;第二支架2的上移和下移会使第一伸缩杆4进行在第一伸缩部41处的拉伸和收缩,之后第一伸缩杆4会通过第二伸缩杆92带动第二伸缩杆92的上升和下降,之后第二伸缩杆92会在电动杆3停止运动时通过内部的电磁铁卡住位置,时第二伸缩杆92可以进行伸缩的同时还可以更好的将按压块91的位移传递下去;当第二支架2的高度变化后会带动第一圆盘61进行运动,第一圆盘61会通过第一绳索62带动驱动圆盘67进行上移动,之后驱动圆盘67回通过第一销轴642和第二滑槽643带动第一连杆64进行旋转,并且是使第一连杆64绕着第一销轴642向驱动圆盘67的离心方向进行旋转,从而会使第三销轴645通过第四滑槽661带动支撑脚66进行运动,从而会使支撑脚66向驱动圆盘67的离心方向进行运动,之后多个支撑脚66形成的支撑圆面的直径会增加,增加了支撑的角度,从而更好的防止倾斜,第二支架2的高度向下运动,同样的原理,使支撑脚66收缩。
实施例七
当老人劳累手离开橡胶套21使助行器停止想要坐下休息时:
手松开的瞬间会通过实施例三和实施例二中的绳索控制组件96拉动第二绳索84,之后第二绳索84拉动旋转盘836旋转,旋转盘836带动第三连杆834旋转,第三连杆834旋转会带动第二滑动块833运动,第二滑动块833会在第三导向杆832上进行滑动,座椅支撑板82原本是收在第一凹腔811中的,会在第二滑动块833的作用下带动座椅支撑板82向下旋转,使座椅支撑板82处于水平位置之后第二滑动块833运动到第一固定板831处,之后第二滑动块833无法继续向前进行运动,从而使座椅支撑板82位置卡住,可以让老人坐下,当再次按下橡胶套21时会在旋转盘836中设置的扭簧的作用下使座椅支撑板82进行复位。
显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。