飞机噪声的自动监测方法
文献发布时间:2023-06-19 13:46:35
技术领域
本申请涉及噪声监测技术领域,特别是涉及一种飞机噪声的自动监测方法。
背景技术
飞机在起飞或者降落过程中,会产生噪声。传统的飞机噪声识别方法,是通过人工手持声级计在机场定点测量噪音,并人工记录飞机的飞行时间,最终通过人工记录下的飞行时间查找飞行噪声事件。这种方法一方面需要消耗大量人力成本,效率低下,另一方面只能知晓飞机在哪个时间节点产生了噪声,无法获知飞机具体使用了哪一条机场跑道,更无法获知飞机处于起飞状态还是降落状态。
发明内容
基于此,有必要针对传统飞机噪声的监测方法只能知晓飞机在哪个时间节点产生了噪声,无法获知飞机具体使用了哪一条机场跑道,更无法获知飞机处于起飞状态还是降落状态的问题,提供一种飞机噪声的自动监测方法。
本申请提供一种飞机噪声的自动监测方法,所述方法包括:
每隔预设时间获取一次环境噪声信号,将所述环境噪声信号转换为数字信号序列;
利用噪声特征提取滤波器提取所述数字信号序列的噪声特征信息,并在所述数字信号序列中显示;
依据所述显示噪声特征信息的数字信号序列判断在预设时间内是否产生飞行噪声事件;
若确定在预设时间内产生飞行噪声事件,则获取在三维空间坐标系中每一架进入机场的飞机的飞机当前坐标,以及获取机场中每一条机场跑道的起点坐标和终点坐标,并依据每一架飞机的飞机当前坐标,以及机场中每一条机场跑道的起点坐标和终点坐标,确定进入机场的飞机的唯一标识码;
依据每一架进入机场的飞机的飞机当前坐标,以及机场中每一条机场跑道的起点坐标和终点坐标,进一步确定每一架进入机场的飞机具体处于哪一条机场跑道内,以及每一架进入机场的飞机与该飞机所处机场跑道的相对方位;
返回所述每隔预设时间获取一次机场的环境噪声信号的步骤。
本申请涉及一种飞机噪声的自动监测方法,通过在机场设置能够自动监测环境噪声的噪声监测设备,每隔预设时间获取一次机场的环境噪声信号并转换为数字信号序列,并通过提取数字信号序列的噪声特征信息自动查找飞行噪声事件,最后通过据每一架进入机场的飞机的飞机当前坐标,以及机场中每一条机场跑道的起点坐标和终点坐标,计算出每一架进入机场的飞机具体是进入哪条机场跑道、飞机在机场跑道中的方位,为飞行噪声事件的判断提供了充足的证据,实现机场周围飞机噪声的自动监测和飞机状态的实时全面的分析。
附图说明
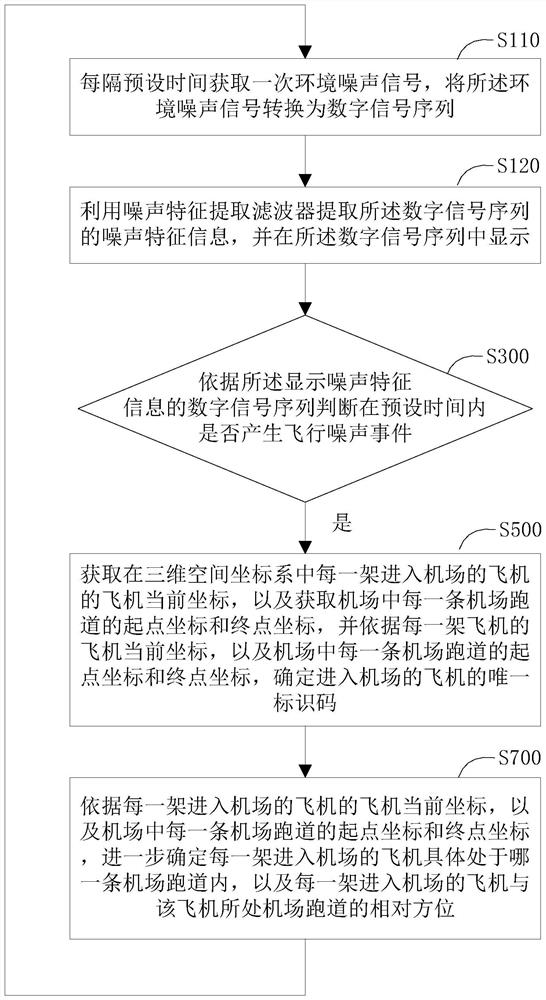
图1为本申请一实施例提供的飞机噪声的自动监测方法的流程示意图;
图2为本申请一实施例提供的时间-噪声特征声压级曲线图。
具体实施方式
为了使本申请的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本申请进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本申请,并不用于限定本申请。
本申请提供一种飞机噪声的自动监测方法。需要说明的是,本申请提供的飞机噪声的自动监测方法应用于任何型号,种类的飞机。
此外,本申请提供的飞机噪声的自动监测方法不限制其执行主体。可选地,本申请提供的飞机噪声的自动监测方法的执行主体的可以为一种飞机噪声的自动监测系统中的噪声监测设备。具体地,本申请提供的飞机噪声的自动监测方法的执行主体的可以为所述噪声监测设备中的一个或多个处理器。
所述飞机噪声的自动监测系统可以包括多个噪声监测设备和服务器。
所述多个噪声监测设备分部可以设置于机场的不同位置。所述服务器与每一个噪声监测设备通信连接。所述服务器用于存储所述监测设备发送的监测数据。
如图1所示,在本申请的一实施例中,飞机噪声的自动监测方法包括如下S110至S900:
S110,每隔预设时间获取一次环境噪声信号,将所述环境噪声信号转换为数字信号序列。
具体地,噪声监测设备可以设置于机场的各条机场跑道的附近,而不是远离机场跑道的位置,例如,不能设置于机场的边缘,如果设置于机场的边缘,距离飞机太远,无法检测到环境噪声信号。
预设时间可以为1秒至10秒之间的一个时间数值。预设时间可以为1秒。预设时间可以为5秒。预设时间也可以为10秒。
环境噪声信号是一个声信号,本步骤还包括把声信号转化为数字信号的步骤。
S120,利用噪声特征提取滤波器提取所述数字信号序列的噪声特征信息,并在所述数字信号序列中显示。
具体地,环境噪声掺杂了飞机噪声和非飞机噪声。飞机噪声即飞机经过噪声监测设备产生的噪声。非飞机噪声包括例如机场的风声,砂石的滚动声等等杂声。飞机噪声是一个宽频带噪声,它与非飞机噪声在频域上有明显的区别。因此,本步骤可以通过噪声特征提取滤波器提取所述数字信号序列的噪声特征信息,从而可以将飞机噪声的特征提取出来,便于后续是否存在飞行噪声事件的判定。
S300,依据所述显示噪声特征信息的数字信号序列判断在预设时间内是否产生飞行噪声事件。
具体地,通过显示噪声特征信息的数字信号序列,可以识别噪声监测设备周围是否产生飞行噪声事件。
S500,若确定在预设时间内产生飞行噪声事件,则获取在三维空间坐标系中每一架进入机场的飞机的飞机当前坐标,以及获取机场中每一条机场跑道的起点坐标和终点坐标。依据每一架飞机的飞机当前坐标,以及机场中每一条机场跑道的起点坐标和终点坐标,确定进入机场的飞机的唯一标识码。
具体地,如果确定在预设时间内产生了飞行噪声事件,则在本步骤中进一步调取特定算法确定具体是哪些飞机进入了机场。每一架飞机都具有一个唯一标识码,可以通过记录唯一识别码,记录所有进入机场的飞机。
S700,依据每一架进入机场的飞机的飞机当前坐标,以及机场中每一条机场跑道的起点坐标和终点坐标,进一步确定每一架进入机场的飞机具体处于哪一条机场跑道内,以及每一架进入机场的飞机与该飞机所处机场跑道的相对方位。
具体地,本步骤还进一步定每一架进入机场的飞机具体处于哪一条机场跑道内,以及每一架进入机场的飞机与该飞机所处机场跑道的相对方位。
S900,返回所述S110。
具体地,每隔预设时间执行一次S100至S900。
本实施例中,通过在机场设置能够自动监测环境噪声的噪声监测设备,每隔预设时间获取一次机场的环境噪声信号并转换为数字信号序列,并通过提取数字信号序列的噪声特征信息自动查找飞行噪声事件,最后通过据每一架进入机场的飞机的飞机当前坐标,以及机场中每一条机场跑道的起点坐标和终点坐标,计算出进入机场的飞机具体是进入哪条机场跑道、飞机在机场跑道中的方位,为飞行噪声事件的判断提供了充足的证据,实现机场周围飞机噪声的自动监测和飞机状态的实时全面的分析。
在本申请的一实施例中,在S110之前,所述飞机噪声的自动监测方法包括如下S010至S020:
S010,设置噪声特征提取滤波器的传递函数,并生成传递函数的表达式。
所述噪声特征提取滤波器的传递函数的表达式如公式1所示。
其中,Z为预设复数。a
具体地,对飞机上升及下降过程的飞机噪声进行频谱分析,同时也对非飞机噪声的频谱进行分析,对比可以得出飞机噪声是一个宽频带噪声,在高频处与非飞机噪声相比有明显差别。本实施例可以设计一个噪声特征提取滤波器,将环境噪声信号的高频部分加强,增强飞机噪声部分的特征量。
噪声特征提取滤波器的传递函数的表达式可以设计为公式1所示。公式1也同时揭示了环境噪声信号的频率特征。
Z为一个预设复数。所述预设复数的值为re
a
S020,将噪声特征提取滤波器的传递函数的表达式转化为差分方程公式,如公式2所示。
其中,n为时间,Xn为第n时刻的输入电压值。Yn为第n时刻的输出电压值。a
具体地,a
本实施例中,通过在整个方法执行之前,通过设置噪声特征提取滤波器的传递函数的表达式,以及将其转化为差分方程公式,便于后续提取环境噪声信号中与飞机噪声相关的噪声特征。
在本申请的一实施例中,所述S110包括如下步骤:
S111,每隔预设时间获取一次环境噪声信号,将所述环境噪声信号转换为数字信号序列Xt。
具体地,环境噪声信号是一个声信号,本步骤还包括把声信号转化为数字信号的步骤。S111可以包括如下S111a至S111b:
S111a,每隔预设时间获取一次机场的环境噪声信号,将所述环境噪声信号通过传声器转化为电信号。
S111b,将电信号通过A/D转换器转换为数字信号序列。
所述数字信号序列是电压信号,可以绘制成一条横坐标为时间,纵坐标为电压值的曲线。
本实施例中,每隔预设时间获取一次环境噪声信号,将所述环境噪声信号转换为数字信号序列Xt,实现了将声信号转化为可以进行处理与计算的数字信号序列。
在本申请的一实施例中,所述S120包括如下S121至S122:
S121,将数字信号序列Xt代入公式2中,得到噪声特征增强后的数字信号序列Yt。
具体地,数字信号序列Xt和噪声特征增强后的数字信号序列Yt都是由多个时间-电压值的数值点组成的序列,代入公式2时,是通过每次最多代入12个数值点,得到转化后数字信号序列Yt的一个数值点。
例如,Y
同理,n=8时,Y
当n=7时,X
因此X
S122,将噪声特征增强后的数字信号序列Yt代入公式3中,得到噪声特征声压级序列Lt。
其中,Lt为t时刻对应的噪声特征声压级。N为0.5秒时间长度内的噪声数据个数。Yt为噪声特征增强后的数字信号序列。
具体地,噪声特征声压级是一种评判噪声等级的参数,单位为分贝(dB)。可选地,噪声特征声压级可以采用A计权声级来计算。
可选地,在S122之后,所述S120还包括:
S123,依据噪声特征声压级序列Lt绘制时间-噪声特征声压级曲线图。时间-噪声特征声压级曲线图如图2所示,横坐标为时间,纵坐标为噪声特征声压级。
本实施例中,通过将数字信号序列Xt代入公式2,将数字信号序列Xt转化为噪声特征增强后的数字信号序列Yt,通过将噪声特征增强后的数字信号序列Yt代入公式3中,得到噪声特征声压级序列Lt,从而得到噪声特征声压级随时间历程的变化情况,为后续判断是否产生飞行噪声事件提供数据基础。
在本申请的一实施例中,所述S300包括如下S310至S350:
S310,获取噪声特征声压级序列Lt中的噪声特征声压级最大值,记为Lmax。获取与噪声特征声压级最大值对应的时刻,记为噪声最大时刻tmax。
具体地,如图2所示,Lmax为图2中的最大纵坐标。tmax为图2中的最大横坐标,本步骤需要找到这两个坐标。
S320,依据Lmax设定噪声特征声压级阈值。所述噪声特征声压级阈值比Lmax小。
具体地,噪声特征声压级阈值可以设置为比Lmax小10分贝的数值。如图2所示,Lmax为90分贝,那么噪声特征声压级阈值就为80分贝。
S330,获取噪声特征声压级序列Lt中,与噪声特征声压级阈值对应的两个时刻。将数值小的时刻记为第一时刻。将数值大的时刻记为第二时刻。
具体地,如图2示出的例子,第一时刻为图2中的t1,第二时刻为图2中的t2。
S340,计算第二时刻和第一时刻的差值。判断第二时刻和第一时刻的差值是否处于预设噪声事件时间范围之内。所述预设噪声事件时间范围为大于3秒且小于60秒的时间范围。
具体地,预设噪声事件时间范围设置为一个相对高数值噪声特征声压级对应的时间范围内。本步骤中设置的是大于3秒且小于60秒的时间范围。
S350,若第二时刻和第一时刻的差值处于预设噪声事件时间范围之内,则确定在预设时间内产生飞行噪声事件。
具体地,如果在预设时间内产生飞行噪声事件,则表明监测设备附近有飞机噪声,也即确定至少有一架进入机场的飞机。
反之,若第二时刻和第一时刻的差值处于预设噪声事件时间范围之外,则确定在预设时间内未产生飞行噪声事件,需要返回初始步骤S110开始新一轮的噪声监测。
本实施例中,通过设定设定噪声特征声压级阈值,获取噪声特征声压级序列Lt中,与噪声特征声压级阈值对应的两个时刻的差值,并判断差值是否处于预设噪声事件时间范围之内,实现自动监测飞行噪声事件的目的,无需人工参与,大大节省人力成本。
在本申请的一实施例中,所述S500包括如下S510至S530:
S510,设置机场参考坐标,所述机场参考坐标用于概括所述机场在所述三维空间坐标系中的位置。
具体地,通过设置机场参考坐标也可以方便定位每一架飞机,以及每一条机场跑道的位置。
S520,筛选飞机当前坐标与机场参考坐标之间直线距离小于或等于10千米的飞机,记为目标飞机。且每筛选出一架目标飞机时,将总航班数在原有数值的基础上加1。所述目标飞机为所述进入机场的飞机。
具体地,飞机当前坐标可以通过设置在飞机中的ADS-B系统来获取。ADS-B是一种基于卫星的系统,可以自动地从飞机中的相关机载设备获取飞机参数,进而实时向其他飞机或地面监测设备广播飞机参数。噪声监测设备就是一种地面监测设备。飞机参数包括但不限于飞机的位置坐标、飞机高度、航行速度、飞机的唯一识别码等参数。
S530,获取每一架目标飞机的唯一标识码并存储。
具体地,唯一识别码相当于飞机的ID号,用于区分不同的飞机。
本实施例中,通过引入机场参考坐标来在三维空间坐标系中定义和概率机场的位置,通过筛选飞机当前坐标与机场参考坐标之间直线距离小于或等于10千米的飞机作为进入机场的飞机,实现了进入机场的飞机的自动化筛选。
其中,所述S520可以包括如下S521至S525:
S521,在服务器的数据库中设置第一计数器并初始化所述计数器的数值为0,所述计数器用于记录总航班数。
S522,选取一架飞机的飞机当前坐标。
S523,判断所述飞机当前坐标与所述机场参考坐标之间的直线距离是否小于或等于10千米。
S524,若所述飞机当前坐标与所述机场参考坐标之间的直线距离小于或等于10千米,则将总航班数在原有数值的基础上加1,并将所述飞机记为记为目标飞机。
S525,若所述飞机当前坐标与所述机场参考坐标之间的直线距离大于10千米,则返回所述S522直至所有的飞机都经过筛选为止,执行后续S530。
可见,本实施例是认定距离机场参考坐标小于或等于10千米的飞机为进入机场的飞机,即目标飞机,而放弃了大于10千米的飞机。目标飞机即进入机场的飞机,命名为目标飞机是为了便于行文。
在本申请的另一实施例中,所述S520包括如下S521至S S529:
S521,在服务器的数据库中设置第一计数器并初始化所述计数器的数值为0,所述计数器用于记录总航班数。
S522,选取一架飞机的飞机当前坐标。
S523,判断所述飞机当前坐标与所述机场参考坐标之间的直线距离是否小于或等于10千米。
S525,若所述飞机当前坐标与所述机场参考坐标之间的直线距离大于10千米,则返回所述S522直至所有的飞机都经过筛选为止,执行后续S530。
S526,若所述飞机当前坐标与所述机场参考坐标之间的直线距离小于或等于10千米,则进一步计算所述飞机当前坐标与所述机场参考坐标的纵坐标差值,判断所述纵坐标差值是否小于或等于200米。
S527,若飞机当前坐标与机场参考坐标的纵坐标差值小于或等于200米,则总航班数在原有数值的基础上加1,并将所述飞机记为记为目标飞机。
S528,若飞机当前坐标与机场参考坐标的纵坐标差值大于200米,则总航班数在原有数值的基础上加1,并将所述飞机记为记为目标飞机,同时向服务器发送报警信息。
具体地,本实施例和前一实施例的S521至S523是一致的,且两个实施例的S525也是一致的,不同之处在于本实施例的S526,若所述飞机当前坐标与所述机场参考坐标之间的直线距离小于或等于10千米,进一步计算所述飞机当前坐标与所述机场参考坐标的纵坐标差值,判断所述纵坐标差值是否小于或等于200米。
如果直线距离是否小于或等于10千米,且纵坐标差值小于或等于200米,表明确定飞机进入了机场。
如果直线距离是否小于或等于10千米,但是纵坐标差值大于200米,表明确定飞机进入了机场但是可能出现了飞机距离机场很近,但是高度很高的情况,这是一种较为特殊的情况,虽然仍然定义飞机为目标飞机,但是这时候需要同时向服务器发送报警信息。
在本申请的一实施例中,所述S700包括如下S710至S730:
S710,依据公式4计算每一架目标飞机的飞机当前坐标到各条机场跑道的垂直距离,记为飞机-跑道距离,得到与每一架目标飞机对应的多个飞机-跑道距离。
其中,V
S720,选取一架目标飞机,将与该目标飞机对应的多个飞机-跑道距离依照从大到小的顺序排序。选取与最小飞机-跑道距离对应的机场跑道作为该目标飞机的飞机所处机场跑道。
S730,返回所述S720,直至得出每一架目标飞机对应的飞机所处机场跑道。
具体地,本步骤定义了每一架目标飞机对应的飞机所处机场跑道,实现了自动判断出目标飞机使用的机场跑道。
机场跑道的位置都是固定不动的,因此各条机场跑道的的起点坐标和终点坐标可以预先计算出来,存储到服务器的数据库中。当执行S710需要计算时,可以从服务器提取各条机场跑道的的起点坐标和终点坐标。
在本申请的一实施例中,在所述S730之后,所述S700还包括如下S741至S748:
S741,选取一架目标飞机,以及与所述目标飞机对应的飞机所处机场跑道。
S742,计算所述目标飞机的飞机当前坐标与飞机所处机场跑道的起点坐标之间的直线距离,记为第一距离。
S743,计算所述目标飞机的飞机当前坐标与飞机所处机场跑道的终点坐标之间的直线距离,记为第二距离。
S744,判断第一距离是否大于第二距离。
S745,若第一距离大于第二距离,则确定所述目标飞机在飞机所处机场跑道的终点侧。将终点侧航班数在原有数值的基础上加1。
S746,若第一距离小于或等于第二距离,则确定所述目标飞机在飞机所处机场跑道的起点侧。将起点侧航班数在原有数值的基础上加1。
S747,在服务器中存储所述目标飞机的飞机当前坐标和当前时间。
S748,返回所述S741,直至每一架目标飞机与所处机场跑道的相对方位均确定完毕。
具体地,在S710至S730中已经确定了每一架目标飞使用的机场跑道。在本实施例中,进一步计算出每一架目标飞机与所处机场跑道的相对方位,即判断目标飞机在飞机所处机场跑道的终点侧还是起点侧。
本实施例中,在服务器的数据库中设置第二计数器并初始化所述计数器的数值为0,所述第二计数器用于记录终点侧航班数。在服务器的数据库中设置第三计数器并初始化所述第三计数器的数值为0,所述第三计数器用于记录起点侧航班数。
本实施例中,通过据每一架进入机场的飞机的飞机当前坐标,以及机场中每一条机场跑道的起点坐标和终点坐标,计算出进入机场的飞机具体是进入哪条机场跑道、飞机在机场跑道中的方位,为飞行噪声事件的判断提供了充足的证据。
在本申请的一实施例中,在S700之后,S900之前,所述飞机噪声的自动监测方法还包括如下步骤:
S800,获取每一架进入机场的飞机在上一秒的飞机坐标,依据每一架进入机场的飞机的飞机当前坐标和在上一秒的飞机坐标确定每一架进入机场的飞机的状态是起飞状态还是降落状态。
本实施例实现了对飞机所处状态的自动分析,便于地面工作人员可以及时了解进入机场的飞机的实时状态。
在本申请的一实施例中,所述S800包括如下S810至S860:
S810,选取一架目标飞机,从服务器中提取所述目标飞机在上一秒的飞机坐标。
S820,计算所述目标飞机在上一秒的飞机坐标与飞机所处机场跑道的起点坐标之间的直线距离,记为第三距离。
S830,判断所述第一距离是否大于所述第三距离。
S840,若所述第一距离大于所述第三距离,则确定所述目标飞机处于起飞状态。
S850,若所述第一距离小于或等于所述第三距离,则确定所述目标飞机处于降落状态。
S860,返回S810,直至所有目标飞机的状态均确定完毕。
本实施例中,通过计算目标飞机在上一秒的飞机坐标与飞机所处机场跑道的起点坐标之间的直线距离,并与目标飞机的飞机当前坐标与飞机所处机场跑道的起点坐标之间的直线距离进行比较,从而实现目标飞机处于降落状态还是起飞状态的判断,实现飞机状态的实时全面的分析。
本申请还涉及一种飞机噪声的自动监测系统。
在本申请的一实施例中,所述飞机噪声的自动监测系统包括多个噪声监测设备和服务器。
所述多个噪声监测设备分部设置于机场的不同位置。所述噪声监测设备用于执行如前述任意一个实施例中提及的飞机噪声的自动监测方法。所述服务器与每一个噪声监测设备通信连接。所述服务器用于存储所述监测设备发送的监测数据。
以上所述实施例的各技术特征可以进行任意的组合,各方法步骤也并不做执行顺序的限制,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本申请的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本申请专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。因此,本申请的保护范围应以所附权利要求为准。