一种车辆异常停留监控方法及系统
文献发布时间:2023-06-19 13:49:36
技术领域
本发明属于车辆监控技术领域,尤其涉及一种车辆异常停留监控方法及系统。
背景技术
农业生产物资从配送站运输到田间地头,运输过程需要内部或者外部车队保障时效,需要指派司机及车辆去完成整个配送过程。但是实操过程中,会出现车辆因为各种原因出现异常停留的情况。例如肥料配送过程,从肥料生产订单开始,指派的司机车辆到配送站仓库装配完成后,按照就近原则,一般会有几公里到几十公里不等的运输过程,才能到达田间地头,这个过程可能持续几个小时到十几个小时。这个过程中,车辆异常停留可能带来的问题和风险有:
1、时效性得不到保障,配送不能及时到达;
2、车辆出现故障,不能及时发现,人货车出现安全隐患;
3、物资存在跑冒滴漏风险。
结合以上情况,需要对物资配送过程进行异常停留监控,及时预警并尽早进行干预。
发明内容
本发明的主要目的在于克服现有技术的缺点与不足,提供一种车辆异常停留监控方法及系统,通过车载设备上报的实时数据形成车辆行驶轨迹数据,在车辆速度小于速度阈值达第一时长时进行车辆异常停留判断,准确度高,符合业务场景需求,在车辆异常停留时进行实时预警提示,能够及时干预,避免运输途中的“跑冒滴漏”等行为风险。
根据本发明的一个方面,本发明提供了一种车辆异常停留监控方法,所述方法包括以下步骤:
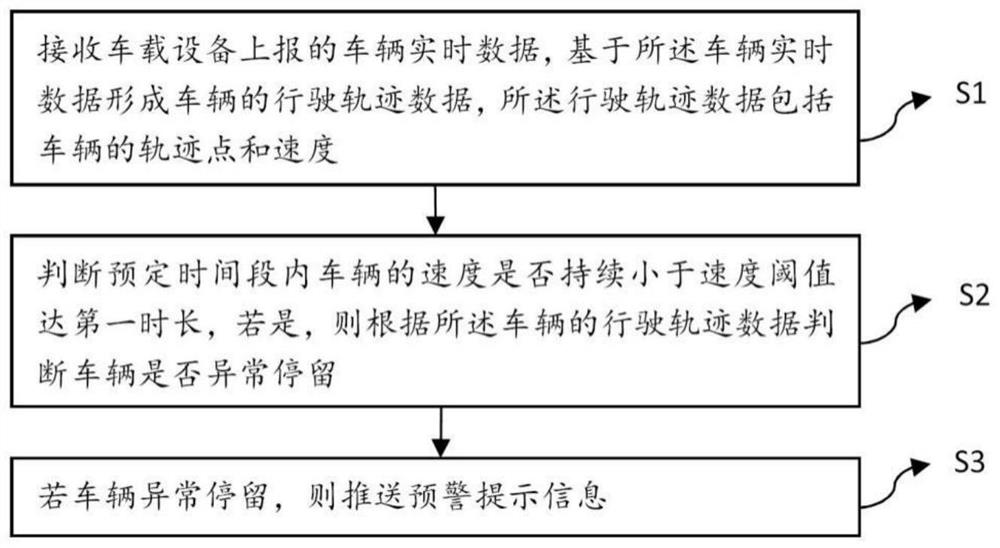
S1:接收车载设备上报的车辆实时数据,基于所述车辆实时数据形成车辆的行驶轨迹数据,所述行驶轨迹数据包括车辆的轨迹点和速度;
S2:判断预定时间段内车辆的速度是否持续小于速度阈值达第一时长,若是,则根据所述车辆的行驶轨迹数据判断车辆是否异常停留;
S3:若车辆异常停留,则推送预警提示信息。
优选地,所述根据所述车辆的行驶轨迹数据判断车辆是否异常停留,包括:
确定第一区域,当所述预定时间段内的轨迹点落入所述第一区域内的比例大于比例阈值时,则确定车辆异常停留。
优选地,所述确定第一区域,包括:
获取所述预定时间段内满足预设条件的预设数量的轨迹点,计算所述预设数量的轨迹点的中心点,以所述中心点为圆心,以预设距离为半径画圆,形成第一区域。
优选地,所述预设数量为4个,所述预设条件包括:经度最大、经度最小、维度最大、维度最小。
优选地,在所述根据所述车辆的行驶轨迹数据判断车辆是否异常停留之前,配置所述预定时间段、所述速度阈值、所述第一时长、所述预设距离和所述比例阈值。
根据本发明的另一个方面,本发明还提供了一种车辆异常停留监控系统,所述系统包括:
接收模块,接收车载设备上报的车辆实时数据,基于所述车辆实时数据形成车辆的行驶轨迹数据,所述行驶轨迹数据包括车辆的轨迹点和速度;
判断模块,判断预定时间段内车辆的速度是否持续小于速度阈值达第一时长,若是,则根据所述车辆的行驶轨迹数据判断车辆是否异常停留;
提示模块,若车辆异常停留,则推送预警提示信息。
优选地,所述根据所述车辆的行驶轨迹数据判断车辆是否异常停留包括:
确定第一区域,当所述预定时间段内的轨迹点落入所述第一区域内的比例大于比例阈值时,则确定车辆异常停留。
优选地,所述确定第一区域,包括:
获取所述预定时间段内满足预设条件的预设数量的轨迹点,计算所述预设数量的轨迹点的中心点,以所述中心点为圆心,以预设距离为半径画圆,形成第一区域。
优选地,所述预设数量为4个,所述预设条件包括:经度最大、经度最小、维度最大、维度最小。
优选地,在所述根据所述车辆的行驶轨迹数据判断车辆是否异常停留之前,配置所述预定时间段、所述速度阈值、所述第一时长、所述预设距离和所述比例阈值。
有益效果:本发明通过车载设备上报的实时数据形成车辆行驶轨迹数据,在车辆速度小于速度阈值达第一时长时进行车辆异常停留判断,准确度高,符合业务场景需求,在车辆异常停留时进行实时预警提示,能够及时干预,避免运输途中的“跑冒滴漏”等行为风险。
通过参照以下附图及对本发明的具体实施方式的详细描述,本发明的特征及优点将会变得清楚。
附图说明
图1是车辆异常停留监控方法流程图;
图2是中心点计算逻辑示意图;
图3是车辆异常停留监控系统示意图。
具体实施方式
下面结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1
图1是车辆异常停留监控方法流程图。如图1所示,本发明提供了一种车辆异常停留监控方法,所述方法包括以下步骤:
S1:接收车载设备上报的车辆实时数据,基于所述车辆实时数据形成车辆的行驶轨迹数据,所述行驶轨迹数据包括车辆的轨迹点和速度。
其中,车辆实时数据包括车辆的定位时间、经度、维度、速度等,行驶轨迹数据包括车辆的轨迹点、速度、起点经纬度,终点经纬度、车辆ACC状态等。车辆的实时位置和轨迹信息通过kafka消息队列传递到设备中台,作为异常停留算法的核心数据输入。
对人、车、定位设备、轨迹数据预处理,形成车辆轨迹数据,通过物联网平台,对人、车、定位设备数据进行绑定,Kafka轨迹数据解析,入时序数据库。
S2:判断预定时间段内车辆的速度是否持续小于速度阈值达第一时长,若是,则根据所述车辆的行驶轨迹数据判断车辆是否异常停留。
所述根据所述车辆的行驶轨迹数据判断车辆是否异常停留包括:
确定第一区域,当所述预定时间段内的轨迹点落入所述第一区域内的比例大于比例阈值时,则确定车辆异常停留。
所述确定第一区域,包括:
获取所述预定时间段内满足预设条件的预设数量的轨迹点,计算所述预设数量的轨迹点的中心点,以所述中心点为圆心,以预设距离为半径画圆,形成第一区域。
优选地,所述预设数量为4个,所述预设条件包括:经度最大、经度最小、维度最大、维度最小。
参考图2,图2是中心点计算逻辑示意图。异常停留核心算法:以tsn(农机机载设备编码)为单位,结合物料运输状态,遍历运输过程中所有轨迹点,速度持续小于速度阈值达第一时长时触发计算,获取预定时间段内满足预设条件的4个轨迹点,所述预设条件为轨迹点的经度最大、或经度最小、或维度最大、或维度最小。通过4个点计算出中心点,以中心点为圆心画圆,预设距离为半径画圆,形成第一区域,在这个时间段内一定比例的轨迹点落在圆内,认为是异常停留。
优选地,在所述根据所述车辆的行驶轨迹数据判断车辆是否异常停留之前,配置所述预定时间段、所述速度阈值、所述第一时长、所述预设距离和所述比例阈值。
具体地,在执行判断之前,预先配置第一时长,默认为20分钟,速度阈值默认为5KM/H±浮动,预定距离即画圆半径默认为100M,预定比例即异常停留位置占比默认为75%。
在一个示例中,20分钟以内,轨迹点75%落在半径100米以内,则判断为异常停留。当车辆离开了这个100米范围后重新判断是否有异常停留。
在一个示例中,在预定的时间间隔内没有收到车载设备上报的实时数据,则判断车辆异常停留。例如,20分钟、40分钟、60分钟没接收到数据,判断为异常停留。
S3:若车辆异常停留,则推送预警提示信息。
在推送预警提示信息时,可以按照一定的时间间隔重复推送预定的次数,例如,20分钟、40分钟、60分钟各推送预警一次,后续不再推送异常停留提示信息。
本实施例结合车辆实时位置进行计算,算法精确,误差率低;采用轨迹分布落点算法,符合业务场景需求;在车辆异常停留时实时预警,能够提示管理层及执行层及时干预,避免运输途中的“跑冒滴漏”等行为风险。
实施例2
图3是车辆异常停留监控系统示意图。如图3所示,本发明还提供了一种车辆异常停留监控系统,所述系统包括:
接收模块,接收车载设备上报的车辆实时数据,基于所述车辆实时数据形成车辆的行驶轨迹数据,所述行驶轨迹数据包括车辆的轨迹点和速度;
判断模块,判断预定时间段内车辆的速度是否持续小于速度阈值达第一时长,若是,则根据所述车辆的行驶轨迹数据判断车辆是否异常停留;
提示模块,若车辆异常停留,则推送预警提示信息。
优选地,所述根据所述车辆的行驶轨迹数据判断车辆是否异常停留包括:
确定第一区域,当所述预定时间段内的轨迹点落入所述第一区域内的比例大于比例阈值时,则确定车辆异常停留。
优选地,所述确定第一区域,包括:
获取所述预定时间段内满足预设条件的预设数量的轨迹点,计算所述预设数量的轨迹点的中心点,以所述中心点为圆心,以预设距离为半径画圆,形成第一区域。
优选地,所述预设数量为4个,所述预设条件包括:经度最大、经度最小、维度最大、维度最小。
优选地,在所述根据所述车辆的行驶轨迹数据判断车辆是否异常停留之前,配置所述预定时间段、所述速度阈值、所述第一时长、所述预设距离和所述比例阈值。
本实施例2中各个模块所执行的方法步骤的具体实施过程与实施例1中的各个步骤的实施过程相同,在此不再赘述。
以上所述仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是在本发明的构思下,利用本发明说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本发明的专利保护范围内。
- 一种车辆异常停留监控方法及系统
- 一种无感知地磅车辆称重数据异常监控方法及系统