一种轴承故障检测方法、装置及设备
文献发布时间:2023-06-19 18:30:43
技术领域
本发明涉及机械设备故障检测技术领域,尤其是指一种轴承故障检测方法、装置及设备。
背景技术
机械系统在国民经济发展中发挥着重要的作用,而轴承在机械系统的动力传输中又起着关键的作用,其健康状态会关系到整个设备的运行性能与安全。由于长期运行在复杂工况及环境下,轴承容易受到损坏,从而造成设备故障,由此可能引起重大的经济损失甚至人员伤亡。因此,对轴承进行准确、及时的故障诊断对于机械系统运行的可靠性具有重要意义。由于机械故障容易带来其振动信号上的变化,所以基于振动信号分析机械设备状态的方式已广泛应用于机械故障诊断领域。当轴承发生故障时,振动信号会激发脉冲响应,呈现周期性和非平稳性;但与此同时,复杂的工作环境也可能会引入大量的噪声,导致故障相关分量被噪声淹没,使故障特征不易被识别。
稀疏低秩矩阵估计是一种常用于图像识别与视频监控的去噪方法,其在这两方面的优异性能受到了广泛关注。从低秩矩阵的角度来看,信号矩阵的秩是矩阵行和列之间相关性的度量,对信号矩阵的秩优化可以有限地去除信号中的冗余信息,从而挖掘出信号中包含的更深层次的信息。由轴承故障引起的瞬态脉冲不仅在时域具有稀疏性,相应的,其时频域系数同样具有稀疏性,同时时频域系数的奇异值分布显示其具有低秩特性,而噪声信号的时频域系数不具备这两种特性。因此,稀疏低秩矩阵估计的方法同样适用于故障特征提取,其基本思想是:将一维含有噪声的信号通过短时傅里叶变换得到其时频域的系数矩阵,将从一维含噪信号中提取轴承故障脉冲信号的问题转化为一个从二维时频域系数矩阵中估计一个稀疏低秩矩阵的问题,再通过对所得到的稀疏低秩矩阵进行短时傅里叶逆变换,从而得到想要的故障瞬态脉冲。然而,由于核范数不能准确的逼近矩阵的秩,稀疏诱导范数不能准确地逼近L0范数,稀疏低秩矩阵估计的方法在故障诊断领域中的应用未取得广泛的发展。
传统稀疏低秩矩阵估计方法通过L1范数诱导时频系数矩阵的稀疏性,通过核范数来逼近矩阵的秩。由于L1范数本身的缺点,其保留信号幅值的能力差,使得最终得到的故障瞬态信号被明显低估。并且,核范数难以非常准确的逼近矩阵的秩,这导致其对于大的奇异值的保留结果会有较大的低估,小的奇异值没有及时的被舍去,由此也会影响最终得到的故障瞬态信号的幅值以及去噪效果。因此,现有的稀疏低秩矩阵估计方法稀疏诱导范数不能准确地逼近L0范数,容易引起故障瞬态脉冲的幅值低估;核范数不能准确地逼近矩阵的秩,奇异值保留效果差,影响故障瞬态脉冲的恢复效果;所得到的恢复信号幅值低估较为严重,平方包络谱幅值低,故障特征频率不明显。
发明内容
为此,本发明所要解决的技术问题在于克服现有技术中对轴承故障瞬态脉冲的重构时域信号幅值低估严重的问题。
为解决上述技术问题,本发明提供了一种轴承故障检测方法,包括:
S1:获取测试轴承的振动加速度时域信号,利用短时傅里叶变换生成时频域系数矩阵Y;
S2:利用广义极小极大凹罚函数与截断核范数构建稀疏低秩优化模型的目标函数,并根据其凸性条件转换为凸性目标函数;利用交替方向乘子法将所述凸性目标函数拆分成关于广义极小极大凹罚函数的第一子目标函数、关于截断核范数的第二子目标函数与辅助迭代函数;
S3:利用前向后向分裂算法,求解所述第一子目标函数,得到关于X
S4:根据所述关于X
S5:利用关于X
S6:对所述时频域稀疏低秩矩阵X
S7:对所述轴承故障瞬态脉冲的重构时域信号进行平方包络谱分析,得到轴承故障特征频率。
在本发明的一个实施例中,所述利用广义极小极大凹罚函数与截断核范数构建稀疏低秩优化模型的目标函数,并根据其凸性条件转换为凸性目标函数包括:
所述稀疏低秩优化模型的目标函数:
所述凸性条件为I
所述凸性目标函数:
其中,X初始化为与矩阵Y规格一致的零矩阵;L表示矩阵X的近似矩阵,X=R
其中,将矩阵X的奇异值分解定义为X=UΣV
U=(u
在本发明的一个实施例中,所述利用交替方向乘子法将所述凸性目标函数拆分成关于广义极小极大凹罚函数的第一子目标函数与关于截断核范数的第二子目标函数包括:
引入变量Z,Z满足Z=X,带入所述凸性目标函数中得:
所述关于广义极小极大凹罚函数的第一子目标函数:
所述关于截断核范数的第二子目标函数:
辅助迭代函数:R=R-(X-Z);
其中,μ表示迭代步长,辅助矩阵R初始化为与所述时频域系数矩阵Y规格一致的零矩阵。
在本发明的一个实施例中,所述利用前向后向分裂算法,求解所述第一子目标函数,得到关于X
分别对X和L求偏导得到:
其中,符号函数
将对X和L求偏导得到的公式带入前向后向分裂算法中得关于X
Q
X
T
L
其中,辅助矩阵R是初始化为与所述时频域系数矩阵Y规格一致的零矩阵,第一矩阵Q
在本发明的一个实施例中,所述根据所述关于X
将
利用奇异值阈值算法求解,得关于Z
其中,A
在本发明的一个实施例中,所述利用奇异值阈值算法求解所述第二目标子函数,得到关于Z
构建权值向量W与所述奇异值阈值算法中的阈值
其中,权值向量W中的元素定义为:
将权值向量W引入所述Z的迭代公式中,更新的关于Z
在本发明的一个实施例中,所述利用关于X
S51:利用关于X
S52:设置迭代次数k=0,1,2,3,…,Nit,输入时频域系数矩阵Y,初始化迭代步长μ、步长ξ、第一正则化参数λ
S53:初始化迭代次数k=0,初始化矩阵X
对X
S54:对于k=1,2,3,…,Nit;
根据X
根据X
利用奇异值算法,根据R
根据R
利用X
S55:令k=k+1,重复S54,直至k+1=Nit,停止迭代,输出X
本发明还提供了一种轴承故障检测装置,包括:
轴承故障信号预处理模块,用于获取测试轴承的振动加速度时域信号,利用短时傅里叶变换生成时频域系数矩阵;
稀疏低秩优化处理模块,用于利用广义极小极大凹罚函数与截断核范数构建稀疏低秩优化模型的目标函数,并利用交替方向乘子法求解获取目标函数迭代公式,将所述时频域系数矩阵输入所述目标函数迭代公式,迭代获取对应的时频域稀疏低秩矩阵;
时域信号重构模块,用于对所述时频域稀疏低秩矩阵进行短时傅里叶逆变换得到轴承故障瞬态脉冲的重构时域信号;
包络谱分析模块,用于对所述轴承故障瞬态脉冲的重构时域信号进行平方包络谱分析,得到轴承故障特征频率。
本发明还提供了一种轴承故障检测设备,包括:
采集装置,用于利用加速度传感器采集测试轴承的加速度时域信号;
轴承故障检测装置,与所述采集装置通讯连接,用于执行计算机程序实现如上述所述的轴承故障检测方法;
显示装置,与所述轴承故障检测装置通讯连接,用于显示所述重构时域信号的平方包络谱图。
在本发明的一个实施例中,所述采集装置包括:
驱动电机;
转动轴,一端通过联轴器连接所述驱动电机;
测试轴承安装座,套设于所述转动轴上,用于固定测试轴承;
加速度传感器,设置于所述转动轴的另一端,用于连接所述测试轴承并测量其振动加速度;
负载装置,用于添加可调节的负载至所述转动轴。
本发明的上述技术方案相比现有技术具有以下优点:
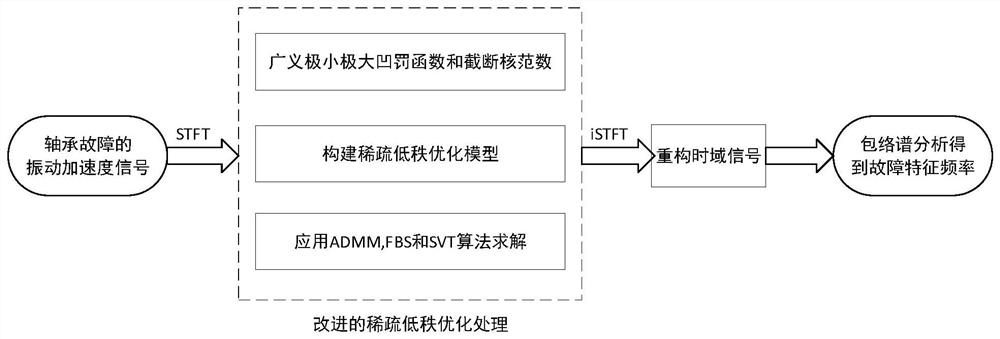
本发明所述的轴承故障检测方法将一维测试轴承振动加速度的时域信号进行短时傅里叶变换得到二维时频域系数矩阵;对二维时频域系数矩阵进行稀疏低秩优化处理生成稀疏低秩矩阵;对稀疏低秩矩阵进行短时傅里叶逆变换得到轴承故障瞬态脉冲的重构时域信号;对重构时域信号进行包络谱分析,得到故障特征频率。在进行稀疏低秩优化处理时,对于时频域系数矩阵的稀疏性,设计广义极小极大凹罚函数逼近L0范数,提升稀疏低秩优化模型的保幅值能力与去噪效果;对于时频域系数矩阵的低秩性,利用截断核范数逼近时频域系数矩阵的秩,并对传统奇异值阈值算法进行改进,设计了与奇异值大小呈负相关的权值向量,利用权值向量对奇异值阈值进行加权处理,提升了奇异值保留效果,从而提升了轴承故障检测的准确性,可信度高。
附图说明
为了使本发明的内容更容易被清楚的理解,下面根据本发明的具体实施例并结合附图,对本发明作进一步详细的说明,其中
图1是本发明实施例所提供的轴承故障检测方法流程图;
图2是本发明实施例所提供的轴承故障检测设备的采集装置示意图;
图3是本发明实施例所提供的故障轴承振动加速度的时域信号图;
图4是本发明实施例所提供的故障轴承振动加速度时域信号经过短时傅里叶变换得到的时频图;
图5是本发明实施例所提供的故障轴承振动加速度时域信号的时频图;
图6是本发明实施例所提供的轴承故障瞬态脉冲的重构时域信号的时频图;
图7是本发明实施例所提供的故障轴承振动加速度的时频域系数矩阵与轴承故障瞬态脉冲的重构时域信号的时频系数矩阵的奇异值分布对比图;
图8是本发明实施例所提供的轴承故障瞬态脉冲的重构时域信号图;
图9的(a)为本发明实施例所提供的轴承故障瞬态脉冲信号的平方包络谱图,图9的(b)为本发明实施例所提供的轴承故障瞬态脉冲信号的平方包络谱局部图。
具体实施方式
下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好地理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
参照图1所示,本发明的轴承故障检测方法包括:
S1:获取测试轴承的振动加速度时域信号,利用短时傅里叶变换生成时频域系数矩阵Y:Y=S(y);
其中,Y表示时频域系数矩阵;y表示振动加速度时域信号;S表示短时傅里叶变换,其具体参数设计可根据使用需求进行调节;
S2:利用广义极小极大凹罚函数与截断核范数构建稀疏低秩优化模型的目标函数,并根据其凸性条件转换为凸性目标函数;利用交替方向乘子法将所述凸性目标函数拆分成关于广义极小极大凹罚函数的第一子目标函数、关于截断核范数的第二子目标函数与辅助迭代函数;
S21:利用广义极小极大凹罚函数与截断核范数构建稀疏低秩优化模型的目标函数,并根据其凸性条件转换为凸性目标函数:
广义极小极大凹罚函数:
截断核范数:
矩阵X的奇异值分解定义为X=UΣV
构建的目标函数:
根据凸性条件I
其中,X初始化为与矩阵Y规格一致的零矩阵;L表示矩阵X的近似矩阵,X=R
将矩阵X的奇异值分解定义为X=UΣV
其中,U=(u
S22:利用交替方向乘子法将所述凸性目标函数拆分成关于广义极小极大凹罚函数的第一子目标函数、关于截断核范数的第二子目标函数与辅助迭代函数:
引入变量Z,Z满足Z=X,带入所述凸性目标函数中得:
所述关于广义极小极大凹罚函数的第一子目标函数:
所述关于截断核范数的第二子目标函数:
辅助迭代函数:R=R-(X-Z);
其中,μ表示迭代步长,辅助矩阵R初始化为与所述时频域系数矩阵Y规格一致的零矩阵。
S3:利用前向后向分裂算法,求解所述第一子目标函数,得到关于X
S31:
分别对X和L求偏导得到:
其中,符号函数
S32:将对X和L求偏导得到的公式带入前向后向分裂算法中得:
Q
X
T
L
其中,第一矩阵Q
S4:根据所述关于X
S41:根据所述关于X
将
利用奇异值阈值算法求解,得Z的迭代公式:
其中,A
S42:对奇异值阈值算法进行加权求解所述第二目标子函数,更新关于Z
构建权值向量W与所述奇异值阈值算法中的阈值
其中,权值向量W中的元素定义为:
将权值向量W引入所述Z的迭代公式中,更新的Z的迭代公式表示为:
S5:利用关于X
S51:利用关于X
S52:设置迭代次数k=0,1,2,3,…,Nit,输入时频域系数矩阵Y,初始化迭代步长μ、步长ξ、第一正则化参数λ
S53:初始化迭代次数k=0,初始化矩阵X
对X
S54:对于k=1,2,3,…,Nit;
根据X
根据X
利用奇异值算法,根据R
根据R
利用X
S55:令k=k+1,重复S54,直至k+1=Nit,停止迭代,输出相对应的时频域稀疏低秩矩阵X
S6:对所述时频域稀疏低秩矩阵X
其中,x
S7:对所述轴承故障瞬态脉冲的重构时域信号进行平方包络谱分析,得到轴承故障特征频率。
基于上述实施例,本发明实施例还提供了一种轴承故障检测装置,包括:轴承故障信号预处理模块,用于获取测试轴承的振动加速度时域信号,利用短时傅里叶变换生成时频域系数矩阵;稀疏低秩优化处理模块,用于利用广义极小极大凹罚函数与截断核范数构建稀疏低秩优化模型的目标函数,并利用交替方向乘子法求解获取目标函数迭代公式,将所述时频域系数矩阵输入所述目标函数迭代公式,迭代获取对应的时频域稀疏低秩矩阵;时域信号重构模块,用于对所述时频域稀疏低秩矩阵进行短时傅里叶逆变换得到轴承故障瞬态脉冲的重构时域信号;包络谱分析模块,用于对所述轴承故障瞬态脉冲的重构时域信号进行平方包络谱分析,得到轴承故障特征频率。
基于上述实施例,本发明实施例还提供了一种轴承故障检测设备,包括:采集装置,用于利用加速度传感器采集测试轴承的加速度时域信号;轴承故障检测装置,与所述采集装置通讯连接,用于执行计算机程序实现如上述所述的轴承故障检测方法;显示装置,与所述轴承故障检测装置通讯连接,用于显示所述重构时域信号的平方包络谱图。
具体地,参照图2所示,采集装置包括:驱动电机;转动轴,一端通过联轴器连接所述驱动电机;测试轴承安装座,套设于所述转动轴上,用于固定测试轴承;加速度传感器,设置于所述转动轴的另一端,用于连接所述测试轴承并测量其振动加速度;负载装置,用于添加可调节的负载至所述转动轴。采集装置还可在转动轴上设置健康轴承,支撑转动轴,平衡施加负载后转动轴的偏心问题。
基于上述实施例,在本实施例中,对本发明实施例所提供的轴承故障检测方法进行验证;本发明实施例所采用的轴承故障的振动加速度时域信号是利用上述采集装置采集的,将加速度传感器放置在测试轴承座上采集振动加速度的时域信号;轴承故障模拟实验台的实验对象是型号为SKF6205-2RS的深沟球轴承,通过线切割加工的割痕来模拟轴承外圈故障,采样频率为10kHz,该轴承外圈故障特征频率的理论值为62.5Hz;本实施例检测的处理器为i5-11400,整个程序的耗时约为2.394s,检测结果准确,论证如下:
具体地,轴承故障检测的具体步骤包括:
将故障轴承振动加速度的时域信号y载入,设置采样频率为10kHz,采样点数为4000,将这4000个点所组成的信号段进行短时傅里叶变换得到其对应的时频域系数矩阵Y:Y=S(y);
其中,Y表示时频域系数矩阵;y表示振动加速度时域信号;S表示短时傅里叶变换,其设置的窗长为64,重合点数为窗长的50%,窗函数为余弦窗,快速傅里叶变换的点数为512;
如图3所示,为故障轴承振动加速度的时域信号图,如图4所示,为故障轴承振动加速度时域信号经过短时傅里叶变换得到的时频图;根据图3与图4可得,从故障轴承振动加速度的时域信号难以看出周期性的轴承故障瞬态脉冲,其时域信号没有明显的稀疏性,且其时频域也没有呈现稀疏性。
对所述时频域系数矩阵进行稀疏低秩优化处理,获取对应的时频域稀疏低秩矩阵;利用广义极小极大凹罚函数与截断核范数构建稀疏低秩优化模型;并利用交替方向乘子法将求解所述稀疏低秩优化模型的问题分解为利用前向后向分裂算法解决广义极小极大凹罚函数优化子问题与利用奇异值阈值算法解决截断核范数优化子问题,以获得稀疏低秩矩阵X
输入时频域系数矩阵Y,初始化变量X,V,Z,R为与时频域系数矩阵Y规格一致的零矩阵;
输入并初始化正则化参数λ
对于k=0,1,2,3,…,Nit,计算A
A
对于k=0,1,2,3,…,Nit,计算X
Q
X
对于k=0,1,2,3,…,Nit,计算V
T
L
对于k=0,1,2,3,…,Nit,计算Z
设置权值向量W
其中σ
将所述权值向量W
对于k=0,1,2,3,…,Nit,计算R
R
得到输出结果X
通过对时频域稀疏低秩矩阵X
参照图5所示,为故障轴承振动加速度时域信号的时频图;参照图6所示,为轴承故障瞬态脉冲的重构时域信号的时频图;通过对比图5与图6可知,通过稀疏低秩优化处理后成狗的轴承故障瞬态脉冲信号的时频图呈现了明显的稀疏性。参照图7所示,为故障轴承振动加速度的时频域系数矩阵与轴承故障瞬态脉冲的重构时域信号的时频系数矩阵的奇异值分布对比图,可以得知,相较于故障轴承振动加速度的时频域系数矩阵有近65个非零奇异值,轴承故障瞬态脉冲的重构时域信号的时频系数矩阵,仅有16个非零奇异值,呈现明显的低秩性,并且大的奇异值得到了较好的保留,提升了轴承故障检测的准确性。参照图8所示,为轴承故障瞬态脉冲的重构时域信号图,对比图3可知,本发明实施例所求得的轴承故障瞬态脉冲重构时域信号的特征,具有明显的稀疏性与周期性,处理效果好。
对所得轴承故障瞬态脉冲信号x
参照图9所示,图9的(a)为轴承故障瞬态脉冲信号的平方包络谱图,图9的(b)为轴承故障瞬态脉冲信号的平方包络谱局部图;根据图9可以明显观察到轴承故障特征频率及其倍频,可以得知本发明实施例所处理的轴承故障振动信号的故障特征频率为62.5Hz,与故障特征频率的理论值一致,证明了本发明所提供的方法的有效性与准确性。
本发明所提供的轴承故障检测方法,将含有噪声的一维轴承故障振动加速度的时域信号进行短时傅里叶变换得到二维时频域系数矩阵;对二维时频域系数矩阵进行改进的稀疏低秩优化处理生成稀疏低秩矩阵;对稀疏低秩矩阵进行短时傅里叶逆变换得到轴承故障瞬态脉冲的重构时域信号。在进行改进的稀疏低秩优化处理时,对于时频域系数矩阵的稀疏性,设计广义极小极大凹罚函数逼近L0范数,提升稀疏低秩优化模型的保幅值能力与去噪效果;对于时频域系数矩阵的低秩性,利用截断核范数逼近时频域系数矩阵的秩,并对传统奇异值阈值算法进行改进,设计了与奇异值大小呈负相关的权值向量,利用权值向量对奇异值阈值进行加权处理,提升了奇异值保留效果,从而提升了轴承故障检测的准确性。
显然,上述实施例仅仅是为清楚地说明所作的举例,并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。