一种低锚系拉力的气室浮式防波堤
文献发布时间:2023-06-19 19:38:38
技术领域
本发明涉及防波堤领域,具体涉及一种低锚系拉力的气室浮式防波堤。
背景技术
浮式防波堤是由浮体和锚泊系统组成的防波堤,可以消减表面波能,常用铁锚系在沉块上。现有的浮式防波堤在波浪作用一段时间后容易走锚(锚泊系统可靠性和耐久性差),箱体或浮排因相互碰撞而发生损坏。这是因为现有的浮式防波堤的锚泊系统通过施加预张力来减小浮体的运动幅度,当锚泊系统的锚链受到周期性拉力的峰值过大时,不仅容易造成抛锚,而且会影响整个浮式防波堤的防浪效果。
发明内容
本发明的目的在于提供一种低锚系拉力的气室浮式防波堤,该气室浮式防波堤能减小浮式防波堤的橫移和横摇的幅度,从而减小锚链受力,提高锚泊系统可靠性和耐久性,提高浮式防波堤的防波效果。
本发明所采用的技术方案是:
一种低锚系拉力的气室浮式防波堤,其包括箱体、发电模块、减摇模块、传动模块、控制模块、减振模块、锚泊系统;
所述发电模块用于吸收太阳能发电和吸收波浪能发电并存储于蓄电池中,为传动模块、控制模块和减振模块提供电能;
所述减摇模块包括位于箱体两侧的气动腔室;2个气动腔室分别位于低锚系拉力的气室浮式防波堤上部的入射波一侧和透射波一侧,用于减小浮式防波堤的摇动幅度、降低波的传输,减小锚系拉力并提高防波效果;
所述传动模块与减振模块连接,用于带动减振模块旋转;
所述控制模块置于箱体内,减振模块置于箱体下方,且控制模块控制减振模块、传动模块工作;控制模块根据低锚系拉力的气室浮式防波堤的运动状态调整传动方向,从而控制减振模块的伞骨架式串列桨的左右叶片的张开与闭合以及伞骨架式串列桨的旋转速度,从而减小低锚系拉力的气室浮式防波堤的横移运动幅度和锚系拉力;
所述锚泊系统与箱体连接。
按上述方案,所述减振模块包括多个平行设置的减振单元;
每个减振单元包括空心管道、中心轴、环形支架、伞骨架式串列桨、固定轴套、花键、可移动轴套;所述空心管道置于箱体下方,与箱体连接;所述中心轴置于空心管道的中心,其两端分别与传动模块的涡轮连接,涡轮带动中心轴旋转,从而带动整个减振单元旋转;所述环形支架有两个,分别通过轴承安设在中心轴两端,用于固定中心轴在空心管道的中轴线上并限制其轴向运动;所述伞骨架式串列桨有2个,为左侧伞骨架式串列桨和右侧伞骨架式串列桨,用于转动产生与低锚系拉力的气室浮式防波堤运动状态相反的力,减小低锚系拉力的气室浮式防波堤横移运动幅度,从而减小锚系拉力并提高防波效果;左侧伞骨架式串列桨和右侧伞骨架式串列桨的外侧通过固定轴套(轴承)和中心轴铰接,固定轴套用于连接伞骨架式串列桨与中心轴;花键安设在中心轴上,用于传递转矩并帮助可移动轴套在中心轴上进行轴向运动;可移动轴套安设在花键上,花键两端安装限位弹簧,限制可移动轴套的运动范围;左侧伞骨架式串列桨和右侧伞骨架式串列桨的内侧与所述可移动轴套两端相接;可移动轴套通过其在中心轴上的轴向运动控制伞骨架式串列桨的工作状态。
按上述方案,所述左侧伞骨架式串列桨和右侧伞骨架式串列桨分别包括多个外侧叶片和多个内侧叶片,外侧叶片与内侧叶片呈对应关系;
外侧叶片的一端与内侧叶片的一端铰接;外侧叶片的另一端与固定轴套(轴承)铰接;内侧叶片的另一端与可移动轴套铰接,用于转动产生与浮式防波堤运动状态相反的力,减小浮式防波堤的橫移和横摇的幅度,从而减小低锚系拉力的气室浮式防波堤的锚链受力。
按上述方案,所述左侧伞骨架式串列桨和右侧伞骨架式串列桨的叶片具有相反的螺距角,使力的方向会随串列桨运动方向的改变而改变。
按上述方案,外侧叶片与内侧叶片采用NACA2412叶型,螺距角为6.2°,用于转动产生与浮式防波堤运动状态相反的力,减小浮式防波堤的橫移和横摇的幅度,从而减小锚链受力。
按上述方案,所述环形支架包括环形架和位于环形架内的支撑,可防止水中的杂质进入减振单元。
按上述方案,所述控制模块包括控制器和多个控制单元,一个控制单元控制一个减振单元;控制器控制传动模块、减振模块的减振单元运动;
每个控制单元包括加速度传感器、正反传送带、开关;所述加速度传感器有两个,分别位于箱体的两端,用于测试感知低锚系拉力的气室浮式防波堤的运动状态并调整正反传送带;所述正反传送带置于箱体内,且位于2个加速度传感器之间;正反传送带位于低锚系拉力的气室浮式防波堤下部空心管道的上方,用于根据低锚系拉力的气室浮式防波堤的运动状态调整传动方向,控制伞骨架式串列桨达到不同的工作状态;所述开关位于减振单元的可移动轴套中部,与正反传送带通过腹板耦合连接,用于调控可移动轴套的轴向运动和伞骨架式串列桨的工作状态;加速度传感器将采集的数据传递给控制器,控制器根据该数据调整正反传送带的工作状态和控制开关工作;
当左侧有波浪作用,加速度传感器检测低锚系拉力的气室浮式防波堤运动状态有向右的正加速度,控制器根据加速度传感器传来的数据调整正反传送带的传动方向和传动模块的蜗轮转动速率,正反传送带通过腹板带动开关控制可移动轴套向右进行轴向运动,减振单元的左侧伞骨架式串列桨叶片闭合,右侧伞骨架式串列桨叶片打开,减振单元的中心轴在传动模块的蜗轮作用下转动,带动减振单元的左侧伞骨架式串列桨和右侧伞骨架式串列桨旋转,使其产生与低锚系拉力的气室浮式防波堤运动状态相反的力,从而减小低锚系拉力的气室浮式防波堤横移运动幅度;
当右侧有波浪作用时,加速度传感器检测低锚系拉力的气室浮式防波堤运动状态有向左的正加速度,控制器根据加速度传感器传来的数据调整正反传送带的传动方向和传动模块的蜗轮转动速率,正反传送带通过腹板带动开关控制可移动轴套向左进行轴向运动,减振单元的右侧伞骨架式串列桨叶片闭合,左侧伞骨架式串列桨叶片打开,减振单元的中心轴在传动模块的蜗轮作用下转动,带动减振单元的左侧伞骨架式串列桨和右侧伞骨架式串列桨旋转,使其产生与低锚系拉力的气室浮式防波堤运动状态相反的力,从而减小低锚系拉力的气室浮式防波堤横移运动幅度。
按上述方案,所述传动模块包括多个传动单元,一个传动单元对应一个减振单元;每个传动单元包括分别设置于箱体两侧的传动机构;
所述传动机构包括电动机、蜗杆和蜗轮;所述电动机置于箱体外侧的蓄电室内,位于低锚系拉力的气室浮式防波堤上部Wells透平发电模组的内侧,用于带动蜗轮旋转;所述蜗杆用于传动蜗轮,其一端与电动机连接,另一端与涡轮连接,涡轮与减振单元的中心轴连接,用于带动减振模块的中心轴旋转;控制模块的控制器控制电动机带动涡轮旋转,进而带动中心轴旋转。
按上述方案,所述发电模块包括太阳能发电模组、Wells透平发电模组和蓄电池;
所述太阳能发电模组置于箱体的顶部;通过铺设的太阳能板吸收太阳能传化为电能,并存储于蓄电池中;
所述Wells透平发电模组位于箱体两侧的气动腔室的气孔处,利用振荡水柱的原理,通过空气的流动带动Wells透平板旋转进行发电,将波浪能转化为电能并将电能存储于蓄电池中;
所述蓄电池置于蓄电室内,位于电动机上方,用于存储电能以及为传动模块、控制模块和减振模块提供电能。
浮式防波堤的防波运动过程主要分为左右横移和横摇,本发明通过传动模块、控制模块和减振模块共同作用产生与浮式防波堤运动方向相反的力来减小浮式防波堤的橫移和横摇的幅度,从而减小锚链受力,提高锚固系统可靠性和耐久性,并且进一步提高浮式防波堤的防波效果。
本发明的有益效果在于:
通过设置减摇模块、传动模块、控制模块和减振模块,减小浮式防波堤的橫移和横摇的幅度,从而减小锚链受力,提高锚泊系统可靠性和耐久性,提高浮式防波堤的防波效果;
通过控制伞骨架式串列桨的工作状态,包括左右叶片的张开与闭合以及伞骨架式串列桨的旋转速度,产生与低锚系拉力的气室浮式防波堤运动状态相反的力,且两端叶片设置相反的螺距角使力的方向随串列桨运动方向的改变而改变,从而减小浮式防波堤的横移运动幅度以及锚系拉力,从而提高锚固系统的可靠性、耐久性和防波效果;
通过气动腔室内的水质量和惯性动量的增加而减轻浮式防波堤对波浪的响应,采用被动减摇的方式减小浮式防波堤的摇动幅度,并降低所有周期的波的传输,从而提高防波效果,减小锚系拉力,提高锚固系统的可靠性和耐久性;
通过加速度传感器和正反传送带形成双向运动控制系统,检测浮式防波堤水平运动状态,并控制伞骨架式串列桨轴向运动,修正叶片工作状态,达到不同的工作状态且改变产生力的方向,消除相位差的影响;
通过设置在浮式防波堤表面的太阳能发电模组和气动腔室气孔处的Wells透平发电模组,吸收太阳能和波浪能发电存储于蓄电池中,为电动机以及控制模块和减振模块的工作供能,节能又环保。
附图说明
下面将结合附图及实施例对本发明作进一步说明,附图中:
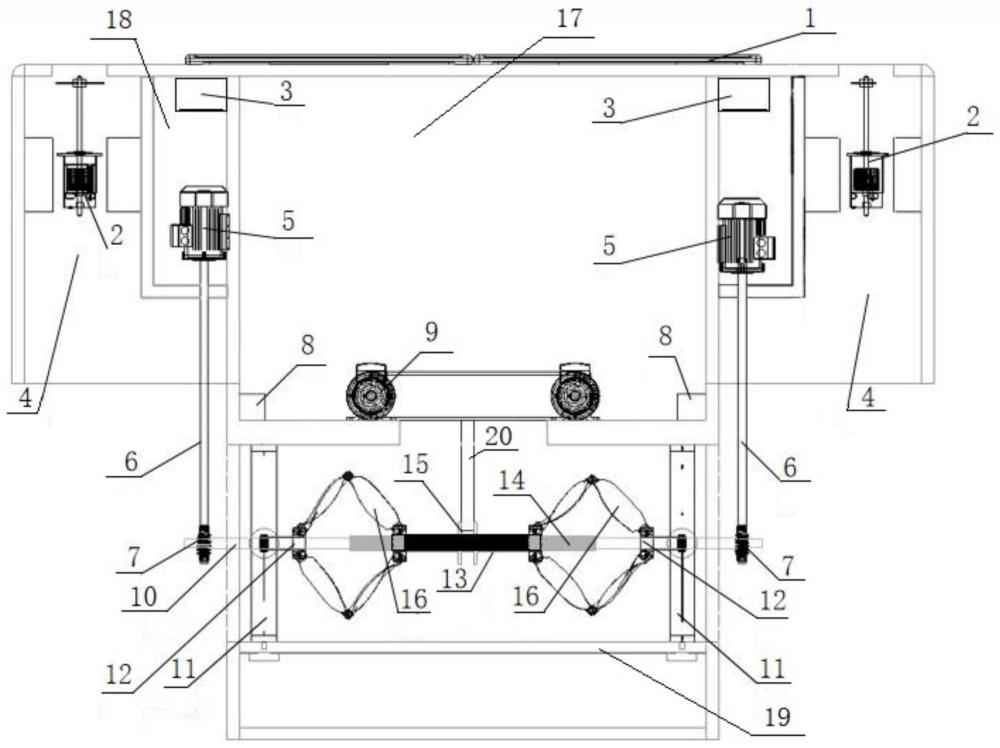
图1是低锚系拉力的气室浮式防波堤的正视示意图;
图2是低锚系拉力的气室浮式防波堤的侧视示意图;
图3是减振模块的结构示意图;
图4是传动模块的线架图;
图5是正反传送带的线架图;
图中:1、太阳能发电模组,2、Wells透平发电模组,3、蓄电池,4、气动腔室,5、电动机,6、蜗杆,7、蜗轮,8、加速度传感器,9、正反传送带,10、中心轴,11、环形支架,11.1、环形架,11.2、支撑,12、固定轴套,13、可移动轴套,14、花键,15、开关,16、伞骨架式串列桨,16.1、左侧伞骨架式串列桨,16.2、右侧伞骨架式串列桨,16.3、外侧叶片,16.4、内侧叶片,17、箱体,18、蓄电室,19、空心管道,20、腹板。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
参见图1-图5,一种低锚系拉力的气室浮式防波堤,其包括箱体17、发电模块、减摇模块、传动模块、减振模块、控制模块、与箱体17连接的锚泊系统。
发电模块包括太阳能发电模组1、Wells透平发电模组2和蓄电池3。太阳能发电模组1置于箱体17的顶部,通过铺设的太阳能板吸收太阳能传化为电能,并存储于蓄电池3中。Wells透平发电模组2位于箱体17两侧的气动腔室4的气孔处,利用振荡水柱的原理,通过空气的流动带动Wells透平板旋转进行发电,将波浪能转化为电能并将电能存储于蓄电池3中。蓄电池3置于箱体外侧的蓄电室18内,位于传动模块的电动机5上方,用于存储电能以及为传动模块、控制模块和减振模块提供电能。
减摇模块包括位于箱体17两侧的气动腔室4;2个气动腔室4分别位于低锚系拉力的气室浮式防波堤上部的入射波一侧和透射波一侧,其中的水质量和惯性动量的增加会减轻浮式防波堤对波浪的响应,这种被动减摇的方式减小了浮式防波堤的摇动幅度,并降低波的传输,减小了锚系拉力以及提高了防波效果。
传动模块用于带动减振模块旋转,其包括4个传动单元,一个传动单元对应一个减振单元;每个传动单元包括分别设置于箱体17两侧的传动机构。每个传动机构包括电动机5、蜗杆6和蜗轮7。电动机6置于箱体17外侧的蓄电室18内,位于低锚系拉力的气室浮式防波堤上部Wells透平发电模组2的内侧,用于带动蜗轮7旋转。蜗杆6用于传动蜗轮7,其一端与电动机5连接,另一端与涡轮7连接;涡轮7与减振单元的中心轴10连接,用于带动减振模块的中心轴10旋转;控制模块的控制器控制电动机5带动涡轮旋转,进而带动中心轴10旋转,从而使伞骨架式串列桨16产生与浮式防波堤运动状态相反的力。
减振模块置于箱体17下方,其包括4个平行设置的减振单元。每个减振单元包括空心管道19、中心轴10、环形支架11、伞骨架式串列桨16、固定轴套12、花键14、可移动轴套13。空心管道19置于箱体17下方,与箱体17连接。中心轴10置于空心管道19的中心,其两端分别与传动模块的涡轮7连接,涡轮7带动中心轴10旋转,从而带动整个减振单元旋转。环形支架11有两个,分别通过轴承安设在中心轴10两端,用于固定中心轴在空心管道19的中轴线上,并限制其轴向运动。本实施例中,环形支架11包括环形架11.1和位于环形架11.1内的支撑11.2,可防止水中的杂质进入减振单元。伞骨架式串列桨16有2个,为左侧伞骨架式串列桨16.1和右侧伞骨架式串列桨16.2,用于转动产生与低锚系拉力的气室浮式防波堤运动状态相反的力,减小低锚系拉力的气室浮式防波堤横移运动幅度,从而减小锚系拉力并提高防波效果。左侧伞骨架式串列桨16.1和右侧伞骨架式串列桨16.2的外侧通过固定轴套12和中心轴10铰接,固定轴套12用于连接伞骨架式串列桨16与中心轴10。花键14安设在中心轴10上,可移动轴套13安设在花键14上,花键14两端安装限位弹簧,限制可移动轴套13的运动范围;花键14用于传递转矩并帮助可移动轴套13在中心轴10上进行轴向运动。左侧伞骨架式串列桨16.1和右侧伞骨架式串列桨16.2的内侧与可移动轴套13两端相接,可移动轴套13通过其在中心轴10上的轴向运动控制伞骨架式串列桨16的工作状态。
本实施例中,左侧伞骨架式串列桨16.1和右侧伞骨架式串列桨16.2分别包括3个外侧叶片16.3和3个内侧叶片16.4,外侧叶片16.3与内侧叶片16.4呈一一对应关系,且外侧叶片16.3与内侧叶片16.4采用NACA2412叶型,螺距角为6.2°。外侧叶片16.3的一端与内侧叶片16.4的一端铰接;外侧叶片16.3的另一端与固定轴套12铰接;内侧叶片16.4的另一端与可移动轴套13铰接,用于转动产生与浮式防波堤运动状态相反的力,减小浮式防波堤的橫移和横摇的幅度,从而减小低锚系拉力的气室浮式防波堤的锚链受力。为了使力的方向随伞骨架式串列桨运动方向的改变而改变,可使左侧伞骨架式串列桨16.1和右侧伞骨架式串列桨16.2的叶片具有相反的螺距角。
控制模块置于箱体17内,包括控制器和4个控制单元,一个控制单元控制一个减振单元。控制器控制传动模块、减振模块的减振单元运动。控制模块根据低锚系拉力的气室浮式防波堤的运动状态调整传动方向,从而控制减振模块的伞骨架式串列桨16的左右叶片的张开与闭合以及伞骨架式串列桨的旋转速度,从而减小低锚系拉力的气室浮式防波堤的横移运动幅度和锚系拉力。具体为:
每个控制单元包括加速度传感器8、正反传送带9、开关15。加速度传感器8有两个,分别位于箱体17的两端,用于测试感知低锚系拉力的气室浮式防波堤的运动状态并调整正反传送带9。正反传送带9置于箱体17内,且位于2个加速度传感器8之间;正反传送带9位于低锚系拉力的气室浮式防波堤下部空心管道19的上方,用于根据低锚系拉力的气室浮式防波堤的运动状态调整传动方向,控制伞骨架式串列桨达到不同的工作状态。开关15位于减振单元的可移动轴套13中部,与正反传送带9通过腹板20耦合连接,用于调控可移动轴套13的轴向运动和伞骨架式串列桨16的工作状态。加速度传感器8将采集的数据传递给控制器,控制器根据该数据调整正反传送带9的工作状态和控制开关15工作。
当左侧有波浪作用,加速度传感器8检测低锚系拉力的气室浮式防波堤运动状态有向右的正加速度,控制器根据加速度传感器8传来的数据调整正反传送带9的传动方向和传动模块的蜗轮7转动速率,正反传送带9通过腹板20带动开关15控制可移动轴套13向右进行轴向运动,减振单元的左侧伞骨架式串列桨16.1叶片闭合,右侧伞骨架式串列桨16.2叶片打开,减振单元的中心轴10在传动模块的蜗轮7作用下转动,带动减振单元的左侧伞骨架式串列桨16.1和右侧伞骨架式串列桨16.2旋转,使其产生与低锚系拉力的气室浮式防波堤运动状态相反的力,从而减小低锚系拉力的气室浮式防波堤横移运动幅度。
当右侧有波浪作用时,加速度传感器8检测低锚系拉力的气室浮式防波堤运动状态有向左的正加速度,控制器根据加速度传感器8传来的数据调整正反传送带9的传动方向和传动模块的蜗轮7转动速率,正反传送带9通过腹板20带动开关15控制可移动轴套13向左进行轴向运动,减振单元的右侧伞骨架式串列桨16.2叶片闭合,左侧伞骨架式串列桨16.1叶片打开,减振单元的中心轴10在传动模块的蜗轮7作用下转动,带动减振单元的左侧伞骨架式串列桨16.1和右侧伞骨架式串列桨16.2旋转,使左侧伞骨架式串列桨16.1和右侧伞骨架式串列桨16.2产生与低锚系拉力的气室浮式防波堤运动状态相反的力,从而减小低锚系拉力的气室浮式防波堤横移运动幅度。
应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
- 一种极端海况下具备可沉浮功能的浮箱-轮胎型浮式防波堤单元及防波堤系统
- 一种张力腿锚系可下潜浮式防波装置及防波堤
- 一种张力腿锚系可下潜浮式防波装置及防波堤