一种火星气动辅助降轨走廊边界分析确定方法
文献发布时间:2024-01-17 01:26:37
技术领域
本发明涉及一种火星气动辅助降轨走廊边界分析确定方法,尤其涉及适用于无推力协同的火星气动辅助降轨走廊边界分析确定方法,属于航空航天技术领域。
背景技术
气动辅助轨道机动是空间和行星探测任务中重要的低燃耗轨道机动策略,该策略可使得航天器在一定燃料消耗下具有更大的机动范围和更强的机动能力。对于气动捕获任务,相应的大气进入走廊即为气动捕获走廊。气动捕获走廊是指飞行器能够安全进入大气并在一定大气飞行航程后可以被行星捕获为环绕轨道的进入角(或再入角)的范围,如图1所示。对于气动降轨任务,气动降轨走廊为飞行器进入大气后可实现经过一段大气飞行能够冲出大气,到达新的环绕轨道对应的进入角的范围。由于气动捕获技术和气动辅助降轨技术在目标上没有本质区别,故统称为气动辅助降轨技术。在火星场景下,由于火星大气稀薄,大气密度和高度较小,一般的无推力协同的飞行器进行气动辅助变轨大气飞行时,单纯通过倾侧角控制飞行器状态的控制能力有限。特别是对于小升阻比飞行器,飞行器进入大气时的航迹角很大程度上决定了飞行器能否降轨成功。目前尚无针对火星气动辅助降轨走廊的求解的直接的方法,针对此问题若考虑一般的采用积分遍历的方法则面临计算时间长,精度低的问题。因此,本专利提出的火星气动辅助降轨走廊边界分析确定方法不仅能通过打靶迅速计算边界,而且精度高,适用范围广,进而满足火星气动辅助机动任务设计的工程计算需要。
已发展的关于火星气动辅助降轨走廊边界分析确定方法中在先技术[1](参见林西强,张育林.气动力辅助异面变轨可达范围的判别方法[J].国防科技大学学报,2000,22(2):7-10.)通过坐标变换法,推导出了包含某种飞行器相对于初始轨道(假设初始轨道倾角为0进行计算的轨道)的倾角改变量范围的计算公式,得到任意初始倾角时气动辅助异面可达范围,并同时给定了其它轨道根数在异面气动辅助过程的变化范围。该方法主要针对异面的轨道面机动的情况,且计算工况并不能直接应用于气动辅助降轨场景,所以不能适用于气动辅助的一般情况。
在先技术[2](参见:Guelman M.Planar Aeroassisted Attainability Domain[J].Journal of Guidance,Control,and Dynamics,1997,20(3):422-427.)研究了平面气动辅助变轨的可达范围,将攻角作为气动辅助的控制变量,通过推导,得到气动辅助可达域的边界取决于初始攻角的结论,从而将问题转化为单变量优化问题,最终给出大气内的可达范围轨迹边界和出大气位置的终端可达域。该方法研究局限于平面气动辅助变轨的可达范围,无法直接推广应用于实际工程中面临的三维气动辅助轨道的任务设计。
上述两种在先技术均非直接面向气动辅助降轨走廊的求解,实际上公开资料中鲜有关于气动辅助降轨走廊的论述或技术。因此对于火星气动辅助降轨走廊的求解,通过逐点精确打靶的方法,可高精度快速求解气动降轨走廊的边界范围,其方法在工程应用上有明显的优势。
发明内容
本发明主要目的提供一种火星气动辅助降轨走廊边界分析确定方法,通过逐点精确打靶的方法,快速求解确定气动降轨走廊的边界范围;具有如下优点:(1)鲁棒性强、可重复性高;(2)精度高,且方便调节;(3)计算速度快,收敛性强;(4)飞行器飞行动力学可根据实际需要更换,适用范围广。
本发明的目的是通过下述技术方案实现的:
本发明公开的一种火星气动辅助降轨走廊边界分析确定方法,在给定初始轨道根数或入口状态的基础之上,建立飞行器在大气中的动力学方程。通过大步长遍历打靶的方法确定气动辅助变轨机动的下界和上界的大致范围。通过建立大气入口、控制量、出口状态的映射关系,得到关于入口边界航迹角的单变量非线性方程。利用基于信赖域的共轭梯度法逐点精确求解给定的飞行器结构参数的走廊上下界值,得到完整的关于飞行器结构参数的气动走廊。
本发明公开的一种火星气动辅助降轨走廊边界分析确定方法,包括如下步骤:
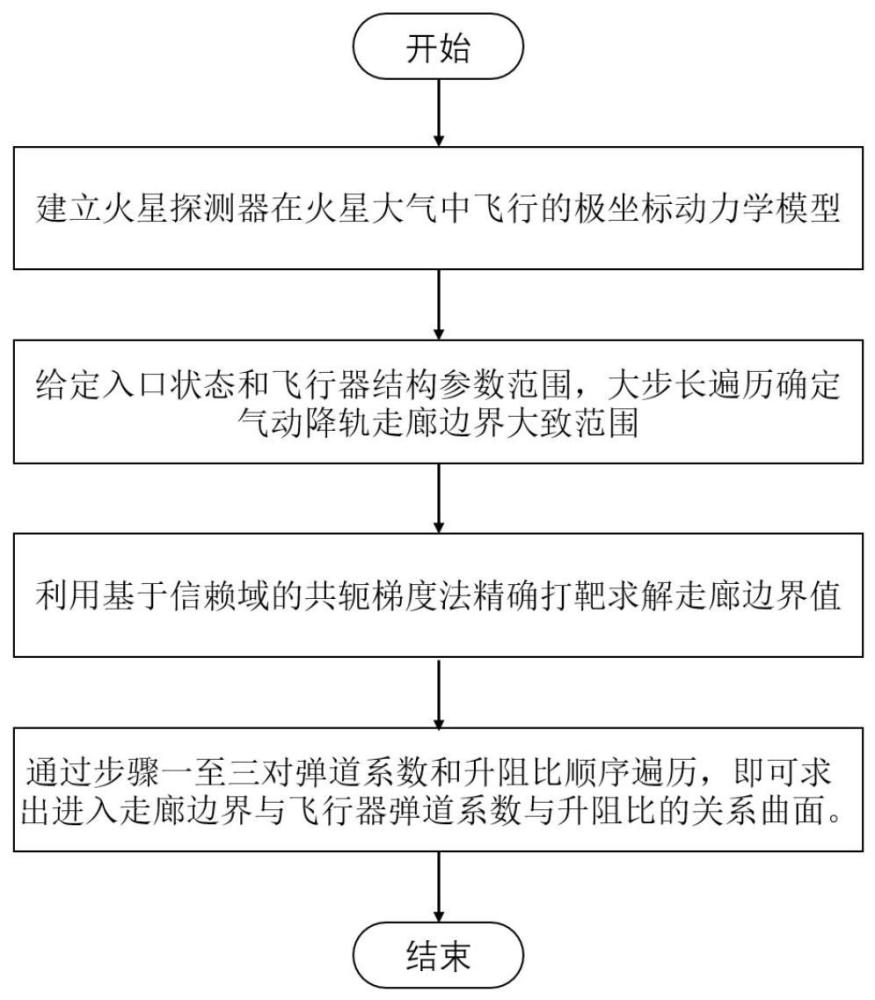
步骤一:建立飞行器大气飞行动力学方程;
火星探测器在火星大气中飞行的极坐标动力学为:
其中:
其中,r为飞行器质心与行星球心的距离;θ为经度;φ为纬度;V为速度大小;γ为飞行器的飞行路径角或航迹角。飞行器处于大气入口处的航迹角记为γ
步骤二:给定入口状态和需要解算的飞行器结构参数范围;大步长遍历积分确定气动降轨走廊边界初选范围;
步骤二中大步长遍历积分确定气动降轨走廊边界初选范围,作为优选,所述大步长指步长范围为1°~5°。
气动辅助降轨走廊是火星探测器可施加控制得以通过穿越火星大气降低轨道能量的大气进入角区间。区间的上下界称为走廊的上下界,或者进入角的上下界。当探测器的大气进入角位于在此走廊外时,一定会导致气动辅助降轨任务的失败。
对于一个给定的火星探测器,设其弹道系数为β,升阻比为L/D。对于给定初始状态x
x
其中x
在气动辅助降轨条件下求解走廊下界的初选范围时,σ=σ
根据式(9)建立入口状态到出口航迹角大小的映射:
γ
若通过对飞行器大气飞行动力学方程积分达到最大积分时限t
当倾侧角取常值σ=σ
e
e
根据式(9)~(11),遍历进入角0~90°,遍历节点对应的积分结果中最接近走廊上下边界的进入角分别记为γ
步骤三:利用基于信赖域的共轭梯度法精确打靶得到走廊边界值,即求解非线性方程得到在给定的弹道系数和升阻比下的气动辅助降轨走廊边界。
根据(10)建立关于走廊下界γ
g
此时x
根据(11)建立关于走廊上界γ
g
此时x
采用基于信赖域的共轭梯度法,求解非线性方程(12)和(13),得到在给定的弹道系数和升阻比下的气动辅助降轨走廊边界。
步骤四、基于步骤一至三对弹道系数和升阻比顺序遍历,求出进入走廊边界、飞行器弹道系数与升阻比的关系曲面。
步骤二中对进入角的遍历积分确定气动降轨走廊边界初选范围只需在对弹道系数和升阻比遍历的首次计算中使用,后续遍历的初值取上一次求解得到的走廊边界值。
对于火星场景下飞行器的气动辅助降轨走廊的求解,通过基于信赖域的共轭梯度法进行逐点精确打靶,提高对气动降轨走廊的边界范围求解确定效率,得到完整的关于飞行器结构参数的气动走廊。确定的走廊给出火星探测器进行气动辅助降轨任务时的进入角选择区间,在此区间外,无法完成降轨任务,在区间内,通过控制倾侧角完成火星气动辅助降轨,提高火星气动降轨效率、鲁棒性和安全性。
有益效果:
1、本发明公开的一种火星气动辅助降轨走廊边界分析确定方法,通过基于信赖域的共轭梯度法进行逐点精确打靶的策略替代在控制量参数域的大范围小步长遍历,且对动力学的形式,大气模型等强非线性约束没有要求,适用范围广。
2、本发明公开的一种火星气动辅助降轨走廊边界分析确定方法,通过在典型参数下遍历的方式准确划定打靶初值,收敛速度很快,鲁棒性强、可重复性高。
3、本发明公开的一种火星气动辅助降轨走廊边界分析确定方法,通过利用基于信赖域的共轭梯度法求解边界,能够根据实际工程计算需要灵活调整精度。
4、本发明公开的一种火星气动辅助降轨走廊边界分析确定方法,对飞行器初始轨道参数没有要求,适用于火星场景下的绝大部分气动捕获和降轨场景的工程计算,所以对初始轨道的适用范围广。
5、本发明公开的一种火星气动辅助降轨走廊边界分析确定方法,由于计算时初值与方程实际解很接近,打靶收敛速度快、计算效率高。
6、本发明公开的一种火星气动辅助降轨走廊边界分析确定方法,在实现上述有益效果基础上,能够得到完整的关于飞行器结构参数的气动走廊,确定的走廊给出火星探测器进行气动辅助降轨任务时的进入角选择区间,在此区间外,无法完成降轨任务,在区间内,通过控制倾侧角完成火星气动辅助降轨,提高火星气动降轨效率、鲁棒性和安全性。
附图说明
图1是本发明提出的火星场景下气动辅助降轨走廊概念示意图;
图2是本发明的一种火星气动辅助降轨走廊边界分析确定方法的流程图;
图3是本实施例中气动辅助降轨走廊上界曲面图;
图4是本实施例中气动辅助降轨走廊三维区域图。
具体实施方式
为了更好地说明本发明的目的和优点,下面通过对一个气动辅助降轨场景下的关于飞行器结构参数的进入走廊进行仿真分析,对本发明做出详细解释。
实施例1:
已知在某次火星气动辅助降轨任务的设计中,火星探测器可供设计的弹道系数可选择的范围为β∈[100,800]kg/m
下面利用本发明内容为此次任务设计分析确定气动辅助降轨的走廊。
本实施例公开的一种火星气动辅助降轨走廊边界分析确定方法,具体实现步骤如下:
步骤一:建立飞行器大气飞行动力学方程;
火星探测器在火星大气中飞行的极坐标动力学为:
其中:
其中,r为飞行器质心与行星球心的距离;θ为经度;φ为纬度;V为速度大小;γ为飞行器的飞行路径角或航迹角。飞行器处于大气入口处的航迹角记为γ
步骤二:给定入口状态和需要解算的飞行器结构参数范围;大步长遍历积分确定气动降轨走廊边界初选范围;
对于一个给定的火星探测器,设其弹道系数为β,升阻比为L/D。对于给定初始状态x
x
其中x
在气动辅助降轨条件下求解走廊下界的初选范围时,σ=σ
根据式(22)建立入口状态到出口航迹角大小的映射:
γ
若通过对飞行器大气飞行动力学方程积分仍达到最大积分时限t
当倾侧角取常值σ=σ
e
e
根据式(23)和(24),在选取升阻比和弹道系数的下边界L/D=0.2,β=100kg/m
步骤三:利用基于信赖域的共轭梯度法精确打靶得到走廊边界值;
根据(10)建立关于走廊下界γ
g
此时x
根据(11)建立关于走廊上界γ
g
此时x
采用基于信赖域的共轭梯度法,求解非线性方程(25)和(26),得到在给定的弹道系数和升阻比下的气动辅助降轨走廊边界;此处使用matlab工具中的fsolve函数实现。
步骤四、通过步骤一至三对弹道系数和升阻比顺序遍历,即可求出进入走廊边界与飞行器弹道系数与升阻比的关系曲面。需要说明的是,步骤二中对进入角的遍历只需在对弹道系数和升阻比遍历的首次计算中使用,后续遍历的初值取上一次求解得到的走廊边界值即可。
在步骤三中求解时设置求解器的相对误差为10
为进一步说明验证本发明的意义,此处在飞行器弹道系数为β=381kg/m
表1:典型进入角和常倾侧角取值下出口状态
以上所述的具体描述,对发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例,用于解释本发明,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种基于气动力不确定降阶的机翼结构气动弹性稳定性分析方法
- 一种基于气动力不确定降阶的机翼结构气动弹性稳定性分析方法