一种基于非均匀线阵的比幅测向方法
文献发布时间:2023-06-19 09:24:30
技术领域
本发明属于信号处理领域,具体涉及一种测向方法。
背景技术
声纳系统的重要任务之一就是测定目标的位置,目标测向是目标参数估计中的重要研究内容。目标方位估计有基于常规波束形成的多波束定向技术与现代高分辨方位估计等多种方法。考虑算法实现的复杂性,在实际应用中比较普遍的测向方法是波束比幅测向法。
测向方法与声学系统的结构有关,由不同数量阵元及排布方式构成的基阵则有不同的测向方法和效果。线阵的结构简单,易于在工程技术中实现。
阵列信号处理将一组传感器按一定的方式布置在空间不同位置上,形成传感器阵列,用传感器阵列来接收空间信号。现有技术一般都采用均匀线阵,但当均匀线阵阵元间距大于半波长时,会出现测向模糊,即对一个方向会有多个谱峰,不能形成规整的多波束,从而影响测向精度。非均匀线阵作为接收基阵,与均匀线阵相比,其相邻阵元间距不受半波长的限制,能得到更大的阵列孔径。
发明内容
为了克服现有技术的不足,本发明提供了一种基于非均匀线阵的比幅测向方法,首先设置非均匀传感器线阵,传感器线阵再利用常规波束形成方法间隔生成多个波束,每一个波束对应一个方向;当声源信号以任意角度入射非均匀传感器线阵时,非均匀传感器线阵的波束方向与声源信号入射方向最接近的波束的输出幅值最大,相邻左右两个波束幅值次之,最后利用三波束插值法计算目标方位。本方法的非均匀线阵相邻阵元间距不受半波长的限制,能得到更大的阵列孔径,同时提高测向精度。
本发明解决其技术问题所采用的技术方案包括以下步骤:
步骤1:传感器线阵设置;
传感器线阵中阵元总数为N,阵元最大相邻间距P
根据P
步骤2:非均匀传感器线阵在-60°到60°内利用常规波束形成方法间隔生成多个波束,所有波束在-3db相交,每一个波束对应一个方向;
将两个非均匀线阵以120°夹角放置,用于航行器前端测向,能够覆盖航行器正前方0°到180°的测向范围;
步骤3:当声源产生的信号以任意角度入射非均匀传感器线阵时,非均匀传感器线阵的波束输出方向与声源信号入射方向最接近的波束在所有非均匀传感器线阵的波束中输出幅值最大;定义非均匀传感器线阵输出的幅值最大的波束为λ
若波束λ
若波束λ
步骤4:三波束比幅插值法计算目标方位;
假设声源信号与波束λ
已知a1、b1、c1三点等间距分布,a1、b1、c1三点的坐标分别为(x
二次插值多项式y=mx
解方程组(1)得到系数m,n,k;
对于虚拟波束λ
本发明的一种基于非均匀线阵的比幅测向方法具有以下有益效果:
1、选择非均匀线阵作为接收基阵,非均匀线阵与均匀线阵相比,其相邻阵元间距不受半波长的限制,能得到更大的阵列孔径。
2、线阵阵元间距大于半波长时,会出现测向模糊,即对一个方向会有多个谱峰,不能形成规整的多波束,从而影响测向精度,非均匀线阵可以改善上述问题。
3、长度一定的非均匀线阵与均匀线阵相比较,基于非均匀线阵的比幅测向方法测向的频率范围更广,精确度更高。
附图说明
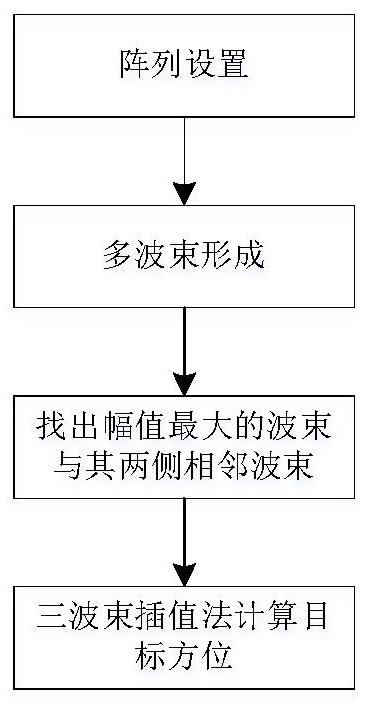
图1是本发明方法的系统框图。
图2是本发明实施例非均匀线阵构成。
图3是本发明实施例阵列布置方式。
图4是本发明实施例非均匀线阵与均匀线阵的波束对比图。
图5是本发明方法三波束比幅测向原理图。
图6是本发明实施例多波束形成图。
图7是本发明实施例测向结果图。
具体实施方式
下面结合附图和实施例对本发明进一步说明。
如图1所示,一种基于非均匀线阵的比幅测向方法,包括以下步骤:
步骤1:传感器线阵设置;
传感器线阵中阵元总数为N,阵元最大相邻间距P
根据P
步骤2:非均匀传感器线阵在-60°到60°内利用常规波束形成方法间隔生成多个波束,所有波束在-3db相交,每一个波束对应一个方向;
将两个非均匀线阵以120°夹角放置,用于航行器前端测向,能够覆盖航行器正前方0°到180°的测向范围;
步骤3:当声源产生的信号以任意角度入射非均匀传感器线阵时,非均匀传感器线阵的波束输出方向与声源信号入射方向最接近的波束在所有非均匀传感器线阵的波束中输出幅值最大;定义非均匀传感器线阵输出的幅值最大的波束为λ
若波束λ
若波束λ
步骤4:三波束比幅插值法计算目标方位;
假设声源信号与波束λ
已知a1、b1、c1三点等间距分布,a1、b1、c1三点的坐标分别为(x
二次插值多项式y=mx
解方程组(1)得到系数m,n,k;
对于虚拟波束λ
具体实施例:
1、最大相邻阵元间距非均匀线阵根据阵元数N按照一定的数学规则关系尽可能地扩大最大相邻间距P
实施例中阵列设计的具体思路:最大相邻间距P
图4是阵列孔径为7.75m的非均匀线阵与均匀线阵的波束对比图,非均匀线阵的主瓣较宽,旁瓣级相对较低,在频率范围增大一定程度内未出现栅瓣,更符合多波束形成的条件,进行测向的频域范围更宽。
非均匀线阵阵元间距集合:d=[0.35,1,2,2,0.7,1,0.7]。
均匀线阵阵元间距:d=7.75/7。
2、在-60°到60°内利用常规波束形成间隔生成多个波束,多个波束在-3db相交,各个波束的曲线几乎相同,每一个波束对应于一个方向。
当声源或信号回波以一定角度入射时,各个波束都有输出,但大小必然有所不同,其中波束指向与入射信号方向最接近的波束的输出幅值最大,与其相邻的两个波束次之,其他波束输出较小;在多波束边缘入射时,若只有一个相邻波束则取幅值最大波束中心方位值为测向结果;
3、如图5所示,利用步骤3中得到的最大输出波束和相邻两波束的幅值进行二次插值,所得的二次多项式的最大值的横坐标为目标方位值。因为波束的主瓣曲线与二次曲线相似,而且二次插值的实现简单且可以满足精度要求。
图5中三条实曲线表示相邻的三个波束,点a、b、c表示波达方向与各波束的交点,点a1、b1、c1是虚拟波束在各条实际波束的主极大方向上的幅值,点a、b、c,的纵坐标与点a1、b1、c1相同。虚曲线表示二次插值得出的虚拟波束,三条竖直虚线表示点a1、b1、c1与各条波束对应的位置。由图5的几何关系可以看出a1、b1、c1三点是等间距分布的。
由步骤4解出系数m,n,k,则
以8元非均匀线阵为例,频率为1000HZ,声速为1500m/s,使用常规波束形成方法在Matlab中编写波束形成应用程序,得到从-60°到60°均匀分布的9个波束(波束在-3db相交),如图6所示,x轴表示方位角,y轴表示波束幅值。从-60°开始每隔2°确定一次最大输出波束,并利用它和它两侧的波束在该角度的输出进行一次测向运算,仿真结果显示于图7中。
测向精度在2.5°以内,一定频域内单个线阵测向范围可达到120°,如图3,按照本方法进行阵列布置(两个线阵以120°夹角放置),将其运用于航行器前端测向,可以覆盖航行器正前方0°到180°的测向范围。
- 一种基于非均匀线阵的比幅测向方法
- 一种基于特殊非均匀线阵的高效压缩感知测向方法