基于柔性导轨的空间相机偏心轴调焦机构
文献发布时间:2023-06-19 09:24:30
技术领域
本发明涉及空间光学遥感技术领域,具体涉及一种基于柔性导轨的空间相机偏心轴调焦机构。
背景技术
空间相机受到复杂环境因素影响后会产生离焦现象,尤其是空间相机进入工作轨道后,微重力环境、真空环境及复杂温度环境会使空间相机主要光学元件产生位移和变形。因此,需要采用调焦机构来补偿空间相机的离焦量,以保证其在轨成像质量,调焦机构也成为了空间相机的重要组成部分。同时,调焦机构随着空间相机在火箭发射过程中会承受极为严格的振动载荷作用,且在轨工作时也会面对真空和大温差等环境,因此保证调焦机构的可靠性也是重中之重。一方面,调焦机构需要执行机构来驱动焦面组件产生位移,执行机构往往可以根据焦面组件的不同可采用丝杠螺母、凸轮和偏心轴等传动方式。其中,丝杠螺母容易在真空和大温差环境下出现卡滞情况;凸轮结构加工难度大且易磨损;偏心轴结构加工简单且可靠性高,但是需要额外机构进行导向,以避免破坏调焦机构或者使焦面组件产生不必要的运动。另一方面,调焦机构也需要导向机构来约束焦面组件的运动方向以实现焦平面高精度移动,传统方法往往利用移动副结构来实现这个功能。
与本发明最为接近的已有技术是发明专利《一种偏心轴焦面调焦机构》(申请号:201010585900.9)。该机构包括焦面组件、调焦组件、基座、导轨滑块和修研垫,焦面组件的两端通过导轨滑块和修研垫连接在基座上,调焦组件装在基座的上端,通过连杆与焦面组件相连。上述调焦组件包括基板、编码器、编码器座、电磁制动器、偏心轴、联轴器、电机座、电机、连杆、第一套筒、第二套筒和铰链座;编码器通过编码器座安装在基板上,偏心轴通过联轴器安装在基板上,电机通过电机座安装在基板上,电磁制动器安装在编码器前段的偏心轴上,偏心轴的偏心部分与连杆上端孔配合。连杆的下端孔通过第一套筒、第二套筒与铰链座相连,焦面组件移动座通过导轨滑块和修研垫与基座连接。
该发明一种偏心轴焦面调焦机构的缺点在于:
a)该发明采用连杆、第一套筒、第二套筒、铰链座、销轴和轴承等结构形成一种曲柄滑块运动机构来抵消偏心轮非调焦方向的运动。该方法额外增加了零件参与焦面调焦运动,冗余的结构不仅降低了调焦机构整体的运行可靠性,且装配过程繁琐,增加了调焦机构的研制难度。
b)该发明采用直线导轨机构作为焦面组件的导向机构。直线导轨机构的滑块与导轨组成的直线移动副之间存在“间隙”,不仅抗振动载荷能力差,且在严苛的在轨工作条件下容易产生“冷焊”和“爬行”现象,会降低调焦机构的调焦精度和调焦分辨率,甚至是使整个调焦机构失效。
发明内容
为了解决现有调焦机构存在的问题,本发明提供了一种基于柔性导轨的空间相机偏心轴调焦机构,满足了空间相机对调焦机构高精度、高分辨率和高可靠性的焦面组件调焦需求。
基于柔性导轨的空间相机偏心轴调焦机构,包括偏心轴、基座、步进电机、联轴器、制动器和编码器;还包括柔性焦面组件驱动座、柔性导轨、偏心轴支撑Ⅰ和偏心轴支撑Ⅱ;
所述偏心轴由轴体和偏心轮构成且为一体加工制造成型,所述偏心轮的中心轴与轴体的中心轴具有一定的偏心量;
所述步进电机安装在基座上;所述偏心轴支撑Ⅰ和偏心轴支撑Ⅱ安装在基座上用于支撑轴体的两端;所述制动器固定在偏心轴支撑Ⅱ上,所述编码器安装在基座上;所述轴体、步进电机、联轴器、偏心轴支撑Ⅰ、偏心轴支撑Ⅱ、制动器和编码器均同轴装配;所述偏心轮与柔性焦面组件驱动座同轴装配;
所述柔性焦面组件驱动座由焦面组件安装座、偏心轮安装座、柔性导轨连接框和偏心轮柔性导向结构构成且为一体加工制造成型;
所述焦面组件安装座用于安装空间相机的焦面组件,所述偏心轮安装座通过偏心轮螺母和偏心轮轴承与偏心轮进行装配固定;所述柔性导轨连接框的两侧分别连接柔性导轨,所述偏心轮柔性导向结构由两个柔性铰链构成,所述两个柔性铰链分别安装在偏心轮安装座两端且均位于偏心轮安装座和柔性导轨连接框之间。
本发明的有益效果:
本发明所述的基于柔性导轨的空间相机偏心轴调焦机构,应用偏心轮柔性导向结构替代传统的曲柄滑块机构来卸载偏心轮非调焦方向的运动。本发明的偏心轮柔性导向结构采用柔性铰链释放偏心轮的运动以避免破坏调焦机构或者使焦面组件产生不必要的运动,该方法更加简单有效,不存在任何运动机构,具备更高的可靠性,精简了装配过程。
本发明所述的基于柔性导轨的空间相机偏心轴调焦机构,应用柔性导轨替代传统的直线导轨机构作为焦面组件的导向机构。本发明的柔性导轨由柔性铰链的弹性变形替代传统采移动副的导向机构,因此不存在“间隙”,所以抵抗振动载荷能力更强,且不会发生“冷焊”和“爬行”现象,能够为焦面组件提供高精度、高分辨率和高可靠性的位移导向。
附图说明
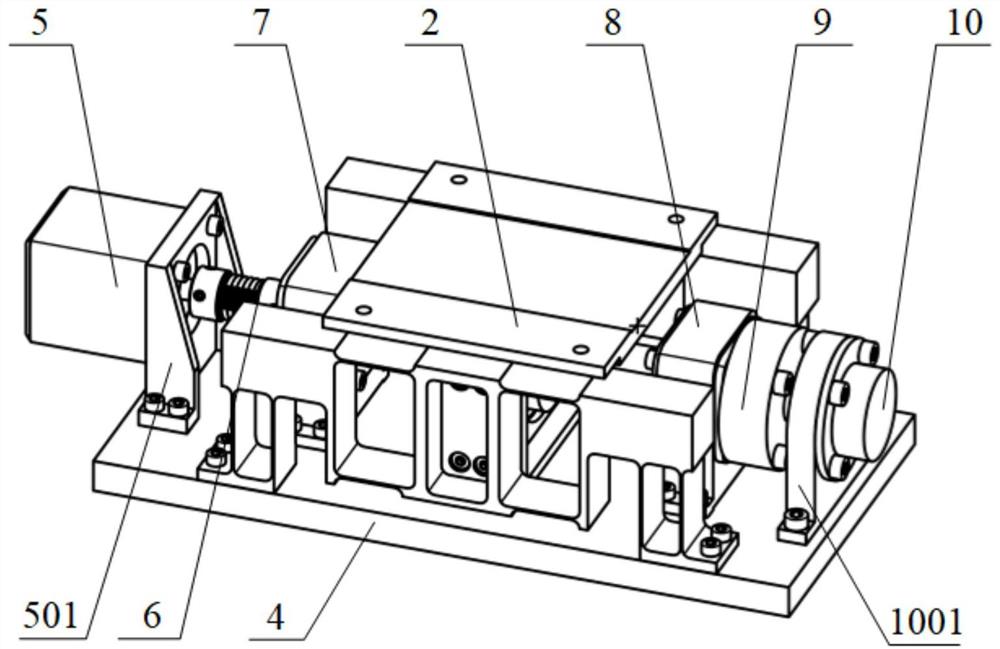
图1为本发明所述的基于柔性导轨的空间相机偏心轴调焦机构的轴侧示意图;
图2为本发明所述的基于柔性导轨的空间相机偏心轴调焦机构的爆炸示意图;
图3为本发明所述的基于柔性导轨的空间相机偏心轴调焦机构的局部剖切示意图;
图4为本发明所述的基于柔性导轨的空间相机偏心轴调焦机构的柔性焦面组件驱动座示意图;
图5为本发明所述的基于柔性导轨的空间相机偏心轴调焦机构的柔性导轨示意图。
图中:1、偏心轴,2、柔性焦面组件驱动座,3、柔性导轨,4、基座,5、步进电机,6、联轴器,7、偏心轴支撑Ⅰ,8、偏心轴支撑Ⅱ,9、制动器,10、编码器;101、轴体,102、偏心轮,201、焦面组件安装座,202、偏心轮安装座,203、柔性导轨连接框,204、偏心轮柔性导向结构,205、偏心轮螺母,206、偏心轮轴承,301、平行四边形柔性铰链Ⅰ,302,、平行四边形柔性铰链Ⅱ,303、柔性导轨固定接口,304、柔性导轨连接接口,501、步进电机安装座,701、轴承Ⅰ,801、轴承Ⅱ,1001、编码器安装座。
具体实施方式
结合附图1至图5说明本实施方式,基于柔性导轨的空间相机偏心轴调焦机构,包括偏心轴1、柔性焦面组件驱动座2、柔性导轨3、基座4、步进电机5、联轴器6、偏心轴支撑Ⅰ7、偏心轴支撑Ⅱ8、制动器9和编码器10。
所述偏心轴1由轴体101和偏心轮102构成且为一体加工制造成型,偏心轮102的中心轴与轴体101的中心轴具有一定的偏心量。
本实施方式中,本发明基于柔性导轨的空间相机偏心轴调焦机构的调焦范围为±2mm,因此偏心轮102的中心轴与轴体101的中心轴偏心量为2mm。
结合图1和图2说明本实施方式,所述偏心轴1自左至右具备装配关系的部分为步进电机5、联轴器6、偏心轴支撑Ⅰ7、柔性焦面组件驱动座2、偏心轴支撑Ⅱ8、制动器9和编码器10。所述步进电机5通过步进电机安装座501安装在基座4上;所述偏心轴支撑Ⅰ7和偏心轴支撑Ⅱ8安装在基座4上;所述制动器9固定在偏心轴支撑Ⅱ8上;所述编码器10通过编码器安装座1001安装在基座4上。
所述轴体101、步进电机5、联轴器6、偏心轴支撑Ⅰ7、偏心轴支撑Ⅱ8、制动器9和编码器10均同轴装配;所述偏心轮102与柔性焦面组件驱动座2同轴装配。
结合图3说明本实施方式,所述偏心轴支撑Ⅰ7和偏心轴支撑Ⅱ8中分别安装有轴承Ⅰ701和轴承Ⅱ801,用于支撑轴体101两端;步进电机5用于提供本发明调焦机构所需要的动力来源;所述联轴器6一端连接步进电机5一端连接轴体101,用于传递步进电机5提供的扭矩;所述制动器9用于制动并锁死轴体101从而可以制动并锁死偏心轴1;所述编码器10用于反馈轴体101转动的角度;
本实施方式中,所述步进电机5通过联轴器6驱动轴体101转动时,偏心轴支撑Ⅰ7和偏心轴支撑Ⅱ8可保持轴体101回转中心轴的稳定;由于偏心轮102的中心轴与轴体101的中心轴具有2mm的偏心量,因此偏心轮102带动柔性焦面组件驱动座2做以偏心轮102中心轴的转动。
本实施方式中,所述制动器9具备如下功能:其一、在火箭发射过程中,本实施方式的调焦机构通过制动器9锁死偏心轴1的转动以抵抗振动载荷;其二、当调焦机构完成在轨调焦任务后制动并锁死偏心轴1以保证焦面组件位置不会发生变化。
本实施方式中,可以通过所述编码器10反馈的轴体101转动角度与偏心轮102与轴体101的偏心量,计算出柔性焦面组件驱动座2的位移量,从而得到焦面组件所在的位置。
结合图4说明本实施方式,所述柔性焦面组件驱动座2由焦面组件安装座201、偏心轮安装座202、柔性导轨连接框203和偏心轮柔性导向结构204构成且为一体加工制造成型。
所述焦面组件安装座201用于安装空间相机的焦面组件;所述偏心轮安装座202通过偏心轮螺母205和偏心轮轴承206与偏心轮102进行装配固定;所述柔性导轨连接框203的两侧用于连接两个柔性导轨3。所述偏心轮柔性导向结构204由两个柔性铰链构成,二者分列偏心轮安装座202两端且分别位于偏心轮安装座202和柔性导轨连接框203之间。
本实施方式中,所述偏心轮柔性导向结构204在非调焦方向上具有一定柔性,可以通过柔性铰链的柔性来卸载偏心轮102在这个方向的运动产生的力,以避免破坏调焦机构或者使焦面组件产生不必要的运动。
结合图5说明本实施方式,所述柔性导轨3由平行四边形柔性铰链Ⅰ301、平行四边形柔性铰链Ⅱ302、柔性导轨固定接口303和柔性导轨连接接口304构成且一体加工制造成型;所述柔性导轨3具有两组,对称分布并通过柔性导轨连接接口304连接在柔性导轨连接框203的两侧,且通过柔性导轨固定接口303固定在基座4上。
本实施方式中,所述平行四边形柔性铰链Ⅰ301提供沿调焦方向的柔性,所述平行四边形柔性铰链Ⅱ302提供沿偏心轴1方向的柔性,平行四边形柔性铰链Ⅰ301与平行四边形柔性铰链Ⅱ302能够同时产生弹性变形释放沿调焦方向的自由度,且二者具有足够的刚度限制非调焦方向的运动。
本实施方式所述的基于柔性导轨的空间相机偏心轴调焦机构的工作过程为:
当轴体101由步进电机5通过联轴器6驱动沿其中心轴做回转运动时,轴体101带动偏心轮102也带沿其中心轴做回转运动,由于偏心轮102的中心轴与轴体101的中心轴存在2mm的偏心量,柔性焦面组件驱动座2可以在偏心轮102的带动下做±2mm范围内的运动。为了保证柔性焦面组件驱动座2的运动能够精准的沿着调焦方向运动,本发明采用偏心轮柔性导向结构204和柔性导轨3实现这一功能。
当偏心轮102带动柔性焦面组件驱动座2产生非调焦方向运动时,偏心轮柔性导向结构204产生弹性变形,从而卸载了这一运动产生的力,同时柔性导轨3中的平行四边形柔性铰链Ⅰ301与平行四边形柔性铰链Ⅱ302在这个方向具有足够的刚度,进一步保证了焦面组件不会在这一方向发生运动;当偏心轮102带动柔性焦面组件驱动座2产生调焦方向运动时,柔性导轨3中的平行四边形柔性铰链Ⅰ301与平行四边形柔性铰链Ⅱ302在沿调焦方向产生弹性变形同时在非调焦方向具有足够的刚度,从而对柔性焦面组件驱动座2形成了精确的导向。
本实施方式通过编码器10反馈轴体101的转动角度,从而计算出柔性焦面组件驱动座2的实时位置,即焦面组件的实时位置。当焦面组件运动到符合空间相机要求的位置时,可通过制动器9制动并锁死轴体101,从而将焦面组件固定在该位置。此时,柔性导向结构204、平行四边形柔性铰链Ⅰ301与平行四边形柔性铰链Ⅱ304均保持当前弹性变形量且不会发生变化。
本实施方式中,所述柔性焦面组件驱动座2与柔性导轨3均为一体加工制造成型,相对于传动的运动机构而言,不存在冗余的传动结构和繁琐的装配过程,因此具有更高的可靠性。同时,本发明采用采用的柔性导向结构204、平行四边形柔性铰链Ⅰ301与平行四边形柔性铰链Ⅱ302均为柔性铰链结构,柔性铰链结构受到环境因素影响小,不易发生精度和分辨率降低和破坏失效等情况,因此具备更高的分辨率和精度。
显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。
- 基于柔性导轨的空间相机偏心轴调焦机构
- 基于柔性导轨的空间相机偏心轴调焦机构