一种测量虚拟显示设备的虚拟场景视场角的方法
文献发布时间:2023-06-19 09:27:35
技术领域
本发明属于光学测量技术领域,尤其涉及一种测量虚拟显示设备的虚拟场景视场角的方法。
背景技术
目前的虚拟显示设备主要以头戴显示器为主,头戴显示器是根据人眼特点来进行设计的,人眼可以通过头戴显示器看到虚拟场景,但却只能通过自己的主观感受去大致的评估虚拟显示设备(头戴显示器)的显示性能,而无法对虚拟场景的深度与视场角做精确的测量。
发明内容
有鉴于此,本发明提供了一种测量虚拟显示设备的虚拟场景视场角的方法,能实现对虚拟场景视场角的量化测量。
为实现上述目的,本发明提供了9种测量虚拟显示设备的虚拟场景视场角的方法的技术方案,具体如下:
一种测量虚拟显示设备的虚拟场景视场角的方法,包括如下步骤:
步骤1,依次放置虚拟显示设备显示屏、虚拟显示设备光学系统、虚拟显示设备出瞳光阑、仿人眼光学系统入瞳光阑、仿人眼光学系统以及仿人眼光学系统传感器;
其中,虚拟显示设备显示屏位于虚拟显示设备光学系统一倍焦距以内,虚拟显示设备显示屏上显示的场景经过虚拟显示设备光学系统成像,形成正立放大的场景虚像;场景虚像经过仿人眼光学系统成像到仿人眼光学系统传感器上;
步骤2,将虚拟显示设备的出瞳光阑中心与仿人眼光学系统入瞳光阑中心重合,仿人眼光学系统位于水平视场角测量旋转起始位置;其中,在所述水平视场角测量旋转起始位置处,仿人眼光学系统传感器上出现一半虚拟场景,一半非虚拟场景,且二者的分界线位于仿人眼光学系统水平视场的中心位置;
将仿人眼光学系统围绕其光阑中心进行水平旋转,仿人眼光学系统传感器上刚好全是虚拟场景时,记录此时的旋转角△h1;虚拟场景的水平视场角为θh=αh/2+△h1,其中αh为仿人眼光学系统的水平视场角;
将仿人眼光学系统位于垂直视场角测量旋转起始位置;其中,在所述垂直视场角测量旋转起始位置处,仿人眼光学系统传感器上会现一半虚拟场景,一半非虚拟场景,且二者的分界线位于仿人眼光学系统垂直视场的中心位置;
将仿人眼光学系统围绕其光阑中心进行垂直旋转,仿人眼光学系统传感器上刚好全是虚拟场景时,记录此时的旋转角△v1;虚拟场景的垂直视场角为θv=αv/2+△v1,其中αv为仿人眼光学系统的垂直视场角。
一种测量虚拟显示设备的虚拟场景视场角的方法,包括如下步骤:
步骤1,依次放置虚拟显示设备显示屏、虚拟显示设备光学系统、虚拟显示设备出瞳光阑、仿人眼光学系统入瞳光阑、仿人眼光学系统以及仿人眼光学系统传感器;
其中,虚拟显示设备显示屏位于虚拟显示设备光学系统一倍焦距以内,虚拟显示设备显示屏上显示的场景经过虚拟显示设备光学系统成像,形成正立放大的场景虚像;场景虚像经过仿人眼光学系统成像到仿人眼光学系统传感器上;
步骤2,将虚拟显示设备的出瞳光阑中心与仿人眼光学系统的入瞳光阑中心重合,将仿人眼光学系统位于水平视场角测量旋转起始位置;其中,在所述水平视场角测量旋转起始位置处,仿人眼光学系统传感器上出现一半虚拟场景,一半非虚拟场景,且二者的分界线位于仿人眼光学系统水平视场的中心位置;
将仿人眼光学系统围绕其光阑中心进行水平旋转,仿人眼光学系统传感器上刚好全是虚拟场景时,记录此时的旋转角△h1;虚拟场景的水平视场角为θh=αh/2+△h1,其中αh为仿人眼光学系统的水平视场角;
将仿人眼光学系统位于垂直视场角测量旋转起始位置;其中,在所述垂直视场角测量旋转起始位置处,仿人眼光学系统传感器上出现一半虚拟场景,一半非虚拟场景,且二者的分界线位于仿人眼光学系统垂直视场的中心位置;
将仿人眼光学系统围绕其光阑中心进行垂直旋转,仿人眼光学系统传感器上再次出现一半虚拟场景,一半非虚拟场景时,记录此时的旋转角△v2;虚拟场景的垂直视场角为θv=△v2。
一种测量虚拟显示设备的虚拟场景视场角的方法,包括如下步骤:
步骤1,依次放置虚拟显示设备显示屏、虚拟显示设备光学系统、虚拟显示设备出瞳光阑、仿人眼光学系统入瞳光阑、仿人眼光学系统以及仿人眼光学系统传感器;
其中,虚拟显示设备显示屏位于虚拟显示设备光学系统一倍焦距以内,虚拟显示设备显示屏上显示的场景经过虚拟显示设备光学系统成像,形成正立放大的场景虚像;场景虚像经过仿人眼光学系统成像到仿人眼光学系统传感器上;
步骤2,将虚拟显示设备的出瞳光阑中心与仿人眼光学系统的入瞳光阑中心重合,将仿人眼光学系统位于水平视场角测量旋转起始位置;其中,在所述水平视场角测量旋转起始位置处,仿人眼光学系统传感器上出现一半虚拟场景,一半非虚拟场景,且二者的分界线位于仿人眼光学系统水平视场的中心位置;
将仿人眼光学系统围绕其光阑中心进行水平旋转,仿人眼光学系统传感器上刚好全是虚拟场景时,记录此时的旋转角△h1;虚拟场景的水平视场角为θh=αh/2+△h1,其中αh为仿人眼光学系统的水平视场角;
将仿人眼光学系统位于垂直视场角测量旋转起始位置;其中,在所述垂直视场角测量旋转起始位置处,仿人眼光学系统传感器上出现一半虚拟场景,一半非虚拟场景,且二者的分界线位于仿人眼光学系统垂直视场的中心位置;
将仿人眼光学系统围绕其光阑中心进行垂直旋转,仿人眼光学系统传感器上刚好全是非虚拟场景时,记录此时的旋转角△v3;虚拟场景的垂直视场角为θv=△v3-αv/2,其中αv为仿人眼光学系统的垂直视场角。
一种测量虚拟显示设备的虚拟场景视场角的方法,包括如下步骤:
步骤1,依次放置虚拟显示设备显示屏、虚拟显示设备光学系统、虚拟显示设备出瞳光阑、仿人眼光学系统入瞳光阑、仿人眼光学系统以及仿人眼光学系统传感器;
其中,虚拟显示设备显示屏位于虚拟显示设备光学系统一倍焦距以内,虚拟显示设备显示屏上显示的场景经过虚拟显示设备光学系统成像,形成正立放大的场景虚像;场景虚像经过仿人眼光学系统成像到仿人眼光学系统传感器上;
步骤2,将虚拟显示设备的出瞳光阑中心与仿人眼光学系统的入瞳光阑中心重合,将仿人眼光学系统位于水平视场角测量旋转起始位置;其中,在所述水平视场角测量旋转起始位置处,仿人眼光学系统传感器上出现一半虚拟场景,一半非虚拟场景,且二者的分界线位于仿人眼光学系统水平视场的中心位置;
将仿人眼光学系统围绕其光阑中心进行水平旋转,仿人眼光学系统传感器上再次出现一半虚拟场景,一半非虚拟场景时,记录此时的旋转角△h2;虚拟场景的水平视场角为θh=△h2;
将仿人眼光学系统位于垂直视场角测量旋转起始位置;其中,在所述垂直视场角测量旋转起始位置处,仿人眼光学系统传感器上出现一半虚拟场景,一半非虚拟场景,且二者的分界线位于仿人眼光学系统垂直视场的中心位置;
将仿人眼光学系统围绕其光阑中心进行垂直旋转,仿人眼光学系统传感器上刚好全是虚拟场景时,记录此时的旋转角△v1;虚拟场景的垂直视场角为θv=αv/2+△v1,其中αv为仿人眼光学系统的垂直视场角。
一种测量虚拟显示设备的虚拟场景视场角的方法,包括如下步骤:
步骤1,依次放置虚拟显示设备显示屏、虚拟显示设备光学系统、虚拟显示设备出瞳光阑、仿人眼光学系统入瞳光阑、仿人眼光学系统以及仿人眼光学系统传感器;
其中,虚拟显示设备显示屏位于虚拟显示设备光学系统一倍焦距以内,虚拟显示设备显示屏上显示的场景经过虚拟显示设备光学系统成像,形成正立放大的场景虚像;场景虚像经过仿人眼光学系统成像到仿人眼光学系统传感器上;
步骤2,将虚拟显示设备的出瞳光阑中心与仿人眼光学系统的入瞳光阑中心重合,将仿人眼光学系统位于水平视场角测量旋转起始位置;其中,在所述水平视场角测量旋转起始位置处,仿人眼光学系统传感器上出现一半虚拟场景,一半非虚拟场景,且二者的分界线位于仿人眼光学系统水平视场的中心位置;
将仿人眼光学系统围绕其光阑中心进行水平旋转,仿人眼光学系统传感器上再次出现一半虚拟场景,一半非虚拟场景时,记录此时的旋转角△h2;虚拟场景的水平视场角为θh=△h2;
将仿人眼光学系统位于垂直视场角测量旋转起始位置;其中,在所述垂直视场角测量旋转起始位置处,仿人眼光学系统传感器上出现一半虚拟场景,一半非虚拟场景,且二者的分界线位于仿人眼光学系统垂直视场的中心位置;
将仿人眼光学系统围绕其光阑中心进行垂直旋转,仿人眼光学系统传感器上再次出现一半虚拟场景,一半非虚拟场景时,记录此时的旋转角△v2;虚拟场景的垂直视场角为θv=△v2。
一种测量虚拟显示设备的虚拟场景视场角的方法,包括如下步骤:
步骤1,依次放置虚拟显示设备显示屏、虚拟显示设备光学系统、虚拟显示设备出瞳光阑、仿人眼光学系统入瞳光阑、仿人眼光学系统以及仿人眼光学系统传感器;
其中,虚拟显示设备显示屏位于虚拟显示设备光学系统一倍焦距以内,虚拟显示设备显示屏上显示的场景经过虚拟显示设备光学系统成像,形成正立放大的场景虚像;场景虚像经过仿人眼光学系统成像到仿人眼光学系统传感器上;
步骤2,将虚拟显示设备的出瞳光阑中心与仿人眼光学系统的入瞳光阑中心重合,将仿人眼光学系统位于水平视场角测量旋转起始位置;其中,在所述水平视场角测量旋转起始位置处,仿人眼光学系统传感器上出现一半虚拟场景,一半非虚拟场景,且二者的分界线位于仿人眼光学系统水平视场的中心位置;
将仿人眼光学系统围绕其光阑中心进行水平旋转,仿人眼光学系统传感器上再次出现一半虚拟场景,一半非虚拟场景时,记录此时的旋转角△h2;虚拟场景的水平视场角为θh=△h2;
将仿人眼光学系统位于垂直视场角测量旋转起始位置;其中,在所述垂直视场角测量旋转起始位置处,仿人眼光学系统传感器上出现一半虚拟场景,一半非虚拟场景,且二者的分界线位于仿人眼光学系统垂直视场的中心位置;
将仿人眼光学系统围绕其光阑中心进行垂直旋转,仿人眼光学系统传感器上刚好全是非虚拟场景时,记录此时的旋转角△v3;虚拟场景的垂直视场角为θv=△v3-αv/2,其中αv为仿人眼光学系统的垂直视场角。
一种测量虚拟显示设备的虚拟场景视场角的方法,包括如下步骤:
步骤1,依次放置虚拟显示设备显示屏、虚拟显示设备光学系统、虚拟显示设备出瞳光阑、仿人眼光学系统入瞳光阑、仿人眼光学系统以及仿人眼光学系统传感器;
其中,虚拟显示设备显示屏位于虚拟显示设备光学系统一倍焦距以内,虚拟显示设备显示屏上显示的场景经过虚拟显示设备光学系统成像,形成正立放大的场景虚像;场景虚像经过仿人眼光学系统成像到仿人眼光学系统传感器上;
步骤2,将虚拟显示设备的出瞳光阑中心与仿人眼光学系统的入瞳光阑中心重合,将仿人眼光学系统位于水平视场角测量旋转起始位置;其中,在所述水平视场角测量旋转起始位置处,仿人眼光学系统传感器上出现一半虚拟场景,一半非虚拟场景,且二者的分界线位于仿人眼光学系统水平视场的中心位置;
将仿人眼光学系统围绕其光阑中心进行水平旋转,仿人眼光学系统传感器仿人眼光学系统传感器上全是非虚拟场景时,记录此时的旋转角△h3;虚拟场景的水平视场角为θh=△h3-αh/2,其中αh为仿人眼光学系统的水平视场角;
将仿人眼光学系统位于垂直视场角测量旋转起始位置;其中,在所述垂直视场角测量旋转起始位置处,仿人眼光学系统传感器上出现一半虚拟场景,一半非虚拟场景,且二者的分界线位于仿人眼光学系统垂直视场的中心位置;
将仿人眼光学系统围绕其光阑中心进行垂直旋转,仿人眼光学系统传感器上刚好全是虚拟场景时,记录此时的旋转角△v1;虚拟场景的垂直视场角为θv=αv/2+△v1,其中αv为仿人眼光学系统的垂直视场角。
一种测量虚拟显示设备的虚拟场景视场角的方法,包括如下步骤:
步骤1,依次放置虚拟显示设备显示屏、虚拟显示设备光学系统、虚拟显示设备出瞳光阑、仿人眼光学系统入瞳光阑、仿人眼光学系统以及仿人眼光学系统传感器;
其中,虚拟显示设备显示屏位于虚拟显示设备光学系统一倍焦距以内,虚拟显示设备显示屏上显示的场景经过虚拟显示设备光学系统成像,形成正立放大的场景虚像;场景虚像经过仿人眼光学系统成像到仿人眼光学系统传感器上;
步骤2,将虚拟显示设备的出瞳光阑中心与仿人眼光学系统的入瞳光阑中心重合,将仿人眼光学系统位于水平视场角测量旋转起始位置;其中,在所述水平视场角测量旋转起始位置处,仿人眼光学系统传感器上出现一半虚拟场景,一半非虚拟场景,且二者的分界线位于仿人眼光学系统水平视场的中心位置;
将仿人眼光学系统围绕其光阑中心进行水平旋转,仿人眼光学系统传感器仿人眼光学系统传感器上全是非虚拟场景时,记录此时的旋转角△h3;虚拟场景的水平视场角为θh=△h3-αh/2,其中αh为仿人眼光学系统的水平视场角;
将仿人眼光学系统位于垂直视场角测量旋转起始位置;其中,在所述垂直视场角测量旋转起始位置处,仿人眼光学系统传感器上出现一半虚拟场景,一半非虚拟场景,且二者的分界线位于仿人眼光学系统垂直视场的中心位置;
将仿人眼光学系统围绕其光阑中心进行垂直旋转,仿人眼光学系统传感器上再次出现一半虚拟场景,一半非虚拟场景时,记录此时的旋转角△v2;虚拟场景的垂直视场角为θv=△v2。
一种测量虚拟显示设备的虚拟场景视场角的方法,包括如下步骤:
步骤1,依次放置虚拟显示设备显示屏、虚拟显示设备光学系统、虚拟显示设备出瞳光阑、仿人眼光学系统入瞳光阑、仿人眼光学系统以及仿人眼光学系统传感器;
其中,虚拟显示设备显示屏位于虚拟显示设备光学系统一倍焦距以内,虚拟显示设备显示屏上显示的场景经过虚拟显示设备光学系统成像,形成正立放大的场景虚像;场景虚像经过仿人眼光学系统成像到仿人眼光学系统传感器上;
步骤2,将虚拟显示设备的出瞳光阑中心与仿人眼光学系统的入瞳光阑中心重合,将仿人眼光学系统位于水平视场角测量旋转起始位置;其中,在所述水平视场角测量旋转起始位置处,仿人眼光学系统传感器上出现一半虚拟场景,一半非虚拟场景,且二者的分界线位于仿人眼光学系统水平视场的中心位置;
将仿人眼光学系统围绕其光阑中心进行水平旋转,仿人眼光学系统传感器上全是非虚拟场景时,记录此时的旋转角△h3;虚拟场景的水平视场角为θh=△ h3-αh/2,其中αh为仿人眼光学系统的水平视场角;
将仿人眼光学系统位于垂直视场角测量旋转起始位置;其中,在所述垂直视场角测量旋转起始位置处,仿人眼光学系统传感器上出现一半虚拟场景,一半非虚拟场景,且二者的分界线位于仿人眼光学系统垂直视场的中心位置;
将仿人眼光学系统围绕其光阑中心进行垂直旋转,仿人眼光学系统传感器上刚好全是非虚拟场景时,记录此时的旋转角△v3;虚拟场景的垂直视场角为θv=△v3-αv/2,其中αv为仿人眼光学系统的垂直视场角。
有益效果:
本发明通过仿人眼光学系统绕光阑中心水平和垂直旋转来测量虚拟场景的水平视场角和垂直视场角,采用仿人眼光学系统代替实际的人眼去观察虚拟场景,能实现对虚拟场景视场角的量化测量。
附图说明
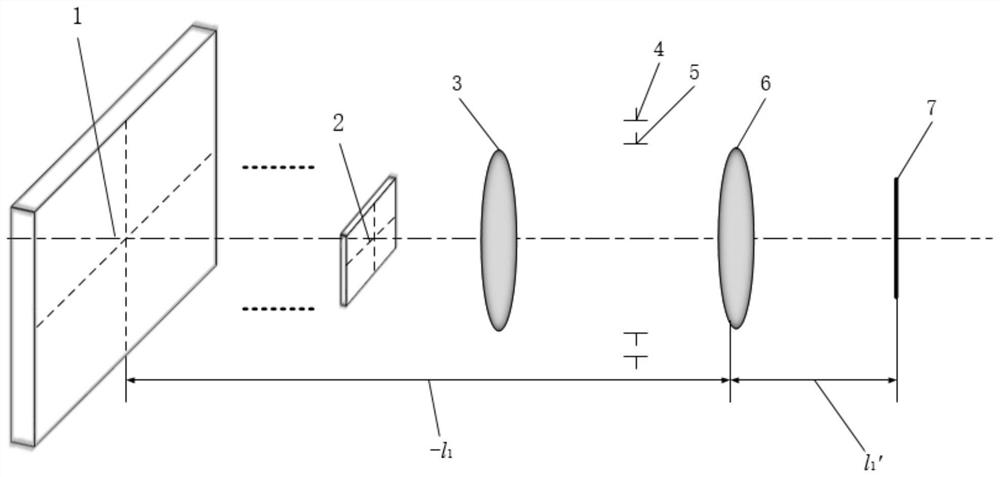
图1为本发明虚拟场景深度测量原理示意图。
图2为本发明虚拟场景水平视场角测量旋转起始位置示意图。
图3为本发明虚拟场景水平视场角测量旋转终点位置1示意图。
图4为本发明虚拟场景水平视场角测量旋转终点位置2示意图。
图5为本发明虚拟场景水平视场角测量旋转终点位置3示意图。
图6为本发明虚拟场景垂直视场角测量旋转起始位置示意图。
图7为本发明虚拟场景垂直视场角测量旋转终点位置1示意图。
图8为本发明虚拟场景垂直视场角测量旋转终点位置2示意图。
图9为本发明虚拟场景垂直视场角测量旋转终点位置3示意图。
具体实施方式
下面结合附图并举实施例,对本发明进行详细描述。
本发明涉及的测量虚拟显示设备的虚拟场景视场角的方法,用仿人眼光学系统(CN201911385482.6)代替实际的人眼,来对虚拟场景进行成像。仿人眼光学系统的入瞳光阑中心靠近虚拟显示设备的出瞳光阑中心。通过移动仿人眼光学系统传感器的位置,对虚拟场景的深度做测量;与此同时,仿人眼光学系统的光轴还可围绕入瞳光阑的中心沿主轴进行水平和垂直旋转,从而对虚拟场景的水平视场角和垂直视场角做量化测量,实现对虚拟显示设备的显示效果做定量分析。
虚拟显示设备的显示效果定量分析分为两部分,第一部分为虚拟场景深度的测量,第二部分为虚拟场景视场角的测量。
第一部分:虚拟场景深度测量原理如图1所示,从左到右,本发明测量系统所涉及的元件虚拟显示设备显示屏2、虚拟显示设备光学系统3、虚拟显示设备出瞳光阑4、仿人眼光学系统入瞳光阑5、仿人眼光学系统6以及仿人眼光学系统传感器7(即虚拟场景的成像平面)。其中l1表示场景虚像1(即虚拟场景)到仿人眼光学系统的物方距离,l1'表示仿人眼光学系统传感器平面7到仿人眼光学系统的距离。在图1中,虚拟显示设备光学系统3和仿人眼光学系统6做了简化处理,均用一个薄透镜表示。虚拟显示设备显示屏2位于虚拟显示设备光学系统 3一倍焦距以内,虚拟显示设备显示屏2上的场景在远方形成放大的场景虚像1。虚拟显示设备出瞳光阑4的中心与仿人眼光学系统入瞳光阑5的中心接近(这里表示为重合),且仿人眼光学系统入瞳光阑5的直径可在人眼瞳孔大小范围 (2mm~10mm)内进行调节。
采用移动仿人眼光学系统传感器的方法来对虚拟场景深度做测量,根据高斯物像关系式有
轴向移动仿人眼光学系统传感器的位置,检测位于l'处像面图像的清晰度,找出像平面图像最清晰的地方,记录此时的像方距离l1',代入
第二部分:虚拟场景视场角测量的核心思想是将仿人眼光学系统围绕其光阑中心进行水平旋转和垂直旋转,通过记录水平旋转角和垂直旋转角,由几何关系求得虚拟场景平面的水平视场角和垂直视场角。具体如下:
依次放置虚拟显示设备显示屏2、虚拟显示设备光学系统3、虚拟显示设备出瞳光阑4、仿人眼光学系统入瞳光阑5、仿人眼光学系统6以及仿人眼光学系统传感器7;
其中,虚拟显示设备显示屏2位于虚拟显示设备光学系统3一倍焦距以内,虚拟显示设备显示屏2上的场景经过虚拟显示设备光学系统3成像,形成正立放大的场景虚像1(虚拟场景);场景虚像1经过仿人眼光学系统6成像到仿人眼光学系统传感器7上;
步骤2,将虚拟显示设备的出瞳光阑4中心与仿人眼光学系统6的入瞳光阑 5中心重合,在测量虚拟场景水平视场角时,仿人眼光学系统绕其光阑中心水平旋转,水平旋转的起始位置如图2所示,图2中粗线代表仿人眼光学系统的光轴,各元件的排列方式和图1一致,相同标号代表相同元件。其中αh为仿人眼光学系统的水平视场角(已知),θh为虚拟场景的水平视场角(待测量),其中αh<θh,当仿人眼光学系统位于水平视场角测量旋转起始位置时,仿人眼光学系统传感器 7上会出现一半虚拟场景,一半非虚拟场景,且二者的分界线位于仿人眼光学系统水平视场的中心位置。
在水平旋转的过程中,可以将3种临界情况作为水平旋转结束的标志,即水平旋转的终点。
第1种临界情况是仿人眼光学系统传感器7上刚好全是虚拟场景,如图3所示,此时若进一步增大旋转角,仿人眼光学系统传感器7上就会出现非虚拟场景 (在此之前,因为αh<θh的缘故,仿人眼光学系统传感器7上只有虚拟场景),利用这一特点,可以通过观察仿人眼光学系统传感器7的变化,记录此时的旋转角△h1,由图3中的几何关系易知θh=αh/2+△h1。
第2种临界情况是仿人眼光学系统传感器7上再次出现一半虚拟场景,一半非虚拟场景,如图4所示,此时虚拟场景和非虚拟场景的分界线再次位于仿人眼光学系统的水平视场的中心位置,利用这一特点,可以通过观察仿人眼光学系统传感器7的变化,记录此时的旋转角△h2,由图4中的几何关系易知θh=△h2。
第3种临界情况是仿人眼光学系统传感器7上全是非虚拟场景,如图5所示,此时仿人眼光学系统传感器7上已观察不到虚拟场景,利用这一特点,人可以通过观察仿人眼光学系统传感器7的变化,记录此时的旋转角△h3,由图5中的几何关系易知θh=△h3-αh/2。
由此,以上3种旋转终点均可用来求得虚拟场景的水平视场角。
在测量虚拟场景垂直视场角时,仿人眼光学系统绕其光阑中心垂直旋转,垂直旋转的起始位置如图6所示,图6中粗线代表仿人眼光学系统的光轴,各元件的排列方式和图1一致,相同标号代表相同元件。其中αv为仿人眼光学系统的垂直视场角(已知),θv为虚拟场景的垂直视场角(待测量),其中αv<θv,当仿人眼光学系统位于垂直视场角测量旋转起始位置时,仿人眼光学系统传感器7上会出现一半虚拟场景,一半非虚拟场景,且二者的分界线位于仿人眼光学系统垂直视场的中心位置。
在垂直旋转的过程中,同样可以将3种临界情况作为垂直旋转结束的标志,即垂直旋转的终点。
第1种临界情况是仿人眼光学系统传感器7上刚好全是虚拟场景,如图7所示,此时若进一步增大旋转角,仿人眼光学系统传感器7上就会出现非虚拟场景 (在此之前,因为αv<θv的缘故,仿人眼光学系统传感器7上只有虚拟场景),利用这一特点,可以通过观察仿人眼光学系统传感器7的变化,记录此时的旋转角△v1,由图7中的几何关系易知θv=αv/2+△v1。
第2种临界情况是仿人眼光学系统传感器7上再次出现一半虚拟场景,一半非虚拟场景,如图8所示,此时虚拟场景和非虚拟场景的分界线再次位于仿人眼光学系统的垂直视场的中心位置,利用这一特点,可以通过观察仿人眼光学系统传感器7的变化,记录此时的旋转角△v2,由图8中的几何关系易知θv=△v2。
第3种临界情况是仿人眼光学系统传感器7上刚好全是非虚拟场景,如图9 所示,此时仿人眼光学系统传感器7上已观察不到虚拟场景,利用这一特点,可以通过观察仿人眼光学系统传感器7的变化,记录此时的旋转角△v3,由图9中的几何关系易知θv=△v3-αv/2。
由此,以上3种旋转终点均可用来求得虚拟场景的垂直视场角。
综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种测量虚拟显示设备的虚拟场景视场角的方法
- 一种虚拟场景下的虚拟对象准入方法和虚拟显示设备