一种用于使籽晶转动的籽晶夹头的快速取放装置
文献发布时间:2023-06-19 09:27:35
【技术领域】
本发明涉及人工晶体制备技术领域,尤其涉及一种快速取放装置,具体涉及一种用于使籽晶转动的籽晶夹头的快速取放装置。
【背景技术】
已知的,现有的硅芯炉一次可同时拉制五根硅芯,一炉次拉制三组共计十五根硅芯,即在上炉室的上端面设置料盘旋转电机,所述料盘旋转电机的动力输出轴连接料盘连接轴的上端,料盘连接轴的下端连接料盘,在所述料盘的左侧设有两个取料工位,在料盘的右侧设有两个放料工位,在料盘的前部设有软轴,所述软轴的上端连接设置在上炉室上端面的升降机构,软轴的下端连接机械手,在所述机械手的下面设有籽晶夹头。具体的拉制方法为在拉制前,首先在料盘左侧的取料工位上放置待用的籽晶夹头,在机械手的下面放置籽晶夹头,然后开始对炉室进行抽真空、充氩气、加热原料棒、拉制硅芯等,硅芯在拉制过程中,需要使用籽晶进行引晶,待引晶完成后进行硅芯的拉制;在此过程中,籽晶需要通过籽晶夹头夹持,待高频线圈将原料棒的端头局部融化成液体后,籽晶夹头带动籽晶下降直至穿过高频线圈的拉制孔插入原料棒上端的熔液内,然后通过籽晶夹头带动籽晶上升,此时籽晶带动溶液上升并重新结晶,最终形成所需长度的硅芯;待一组硅芯拉制完成后,料盘旋转,将拉制好的硅芯放置在料盘右侧的放料工位上,然后料盘反转,使机械手在料盘左侧的取料工位重新抓取一个待用的籽晶夹头,开始新一组硅芯的拉制,重复上述步骤,直至多组硅芯拉制完成。
而目前本领域技术人员在拉制硅芯时,通常采用的籽晶夹头是通过在连接盘的下面固定一定数量的装有籽晶的夹持件,然后在连接盘的上面设有挂接机构,挂接机构挂接在机械手上;如中国专利、专利号为200810231413.5,公开号为CN101532170A,申请日期为2008年12月17日,专利名称为一种可调节夹头数量的籽晶夹头,其具体公开的结构就是在连接盘的下面固定一定数量的装有籽晶的夹持件,其在使用过程中无法使籽晶夹头在拉制过程中实现旋转,在拉制硅芯时无法完成对所拉制硅芯的椭圆度进行修正,也就是说通过该结构的籽晶夹头拉制出的硅芯椭圆,以直径为8mm的硅芯为例,其长轴与短轴的差值为0.6mm左右,10mm的硅芯其长轴与短轴的差值达到1.1mm左右,而12mm的硅芯其长轴与短轴的差值达到2.2mm左右,而椭圆的硅芯在还原炉内还原时不易装夹等。
为了克服上述技术问题,本领域技术人员发明了可以使籽晶转动的籽晶夹头,如中国专利、专利号为201410169006.1,公开号为CN103993353A,申请日期为2014年4月18日,专利名称为一种使籽晶转动的籽晶夹头,其具体公开的技术方案虽然可以使籽晶进行旋转,可以解决硅芯椭圆度的问题,但是该技术方案中的动力源与旋转机构直连,也就是说该结构的籽晶夹头每一个籽晶夹头上都需要配备一个动力源,动力源无法与籽晶夹头脱开,进一步,连接盘直接连接提拉装置,而每个炉室内一般都设置一套提拉装置,进而无法实现一炉次拉制多组硅芯的技术诉求,即便是在一个炉室内设置多套提拉装置实现一炉次拉制多组硅芯的技术诉求,那么就需要设置多个动力源,进而导致设备成本增加,同时还加大了设备的维保难度等。那么如何提供一种用于使籽晶转动的籽晶夹头的快速取放装置就成了本领域技术人员的长期技术诉求。
【发明内容】
为了实现所述发明目的,本发明提供了一种用于使籽晶转动的籽晶夹头的快速取放装置,本发明将动力源设置在机械手上,动力源的主轴与挂接在机械手上的旋转主轴通过快接机构连接,这样就可以实现一个动力源驱动多个籽晶旋转盘的技术诉求,同时还大大降低了设备的维保成本等。
为实现上述发明目的,本发明采用如下技术方案:
一种用于使籽晶转动的籽晶夹头的快速取放装置,包括动力源、旋转主轴、机械手、定位块、空心轴和快接机构,所述旋转主轴的下端连接籽晶旋转盘的动力输入端,在旋转主轴的外缘面套接空心轴,所述空心轴的下端连接籽晶旋转盘,在空心轴上端的外缘面设有向外延伸的挂接块,在挂接块下方空心轴的外缘面设有定位块,挂接块挂接在机械手上,所述机械手的上面设有动力源,所述动力源的主轴与旋转主轴的上端通过快接机构连接形成所述的用于使籽晶转动的籽晶夹头的快速取放装置。
所述的用于使籽晶转动的籽晶夹头的快速取放装置,所述快接机构包括旋转横杆和横杆传动套,所述横杆传动套的上端连接动力源的主轴,旋转横杆设置在旋转主轴的上端,所述旋转横杆卡接在横杆传动套下端头的卡槽内。
所述的用于使籽晶转动的籽晶夹头的快速取放装置,所述快接机构的替换结构为快接机构包括传动套和中间传动盘,所述传动套的上端连接动力源的主轴,在传动套的外缘面设有中间传动盘穿孔,在中间传动盘穿孔的底部设有空心轴穿孔,在中间传动盘穿孔的底面设有至少一个主动键,中间传动盘设置在旋转主轴的上端,在所述中间传动盘的下面设有至少一个传动键,所述传动键与主动键啮合实现动力传递。
所述的用于使籽晶转动的籽晶夹头的快速取放装置,所述快接机构的第二替换结构为快接机构包括主动齿轮、从动齿轮、机械手过渡套、下过渡齿轮、齿轮轴和上过渡齿轮,在所述机械手过渡套的上面设有动力源,在动力源的主轴上套接主动齿轮,所述主动齿轮与上过渡齿轮,所述上过渡齿轮套接在齿轮轴外缘面的上部 ,在齿轮轴外缘面的下部设有下过渡齿轮,从动齿轮套接在旋转主轴的上端,所述下过渡齿轮与从动齿轮啮合实现动力传递。
所述的用于使籽晶转动的籽晶夹头的快速取放装置,所述机械手过渡套为桶形结构,在机械手过渡套的外缘面上设有从动齿轮穿孔,在从动齿轮穿孔的底部设有贯通至机械手过渡套下面的弧形槽A,在弧形槽A左侧或右侧或左右两侧设置齿轮轴安装孔,机械手过渡套的下面设有机械手。
所述的用于使籽晶转动的籽晶夹头的快速取放装置,所述机械手为桶形结构,在机械手的外缘面上设有挂接块穿孔,在所述挂接块穿孔的底部设有贯通至机械手下面的挂接块定位槽。
所述的用于使籽晶转动的籽晶夹头的快速取放装置,所述挂接块定位槽左右两侧的侧壁上分别设有上端大下端小的挂接块导向槽。
所述的用于使籽晶转动的籽晶夹头的快速取放装置,所述挂接块导向槽下面设有挂接块限位斜面。
所述的用于使籽晶转动的籽晶夹头的快速取放装置,所述机械手的上面设有弧形槽B使机械手形成分体结构,所述弧形槽B与弧形槽A对应设置。
所述的用于使籽晶转动的籽晶夹头的快速取放装置,所述挂接块的外缘面上设有导向锥面。
所述的用于使籽晶转动的籽晶夹头的快速取放装置,所述挂接块下面与空心轴外缘面过渡处设有限位斜面。
所述的用于使籽晶转动的籽晶夹头的快速取放装置,所述挂接块下方空心轴的外缘面上设有定位平台。
由于采用如上所述的技术方案,本发明具有如下有益效果:
本发明将动力源设置在机械手上,动力源的主轴与挂接在机械手上的旋转主轴通过快接机构连接,这样就可以实现一个动力源驱动多个籽晶旋转盘的技术诉求,即采用一个上轴提拉系统,同时实现拉制多组硅芯的目的,本发明在修正由于高频线圈拉制孔内温度不一致导致硅芯椭圆,提高成品硅芯合格率的同时,还大大降低了设备的维保成本等,本发明具有结构简单,操作方便等特点,适合大范围的推广和应用。
【附图说明】
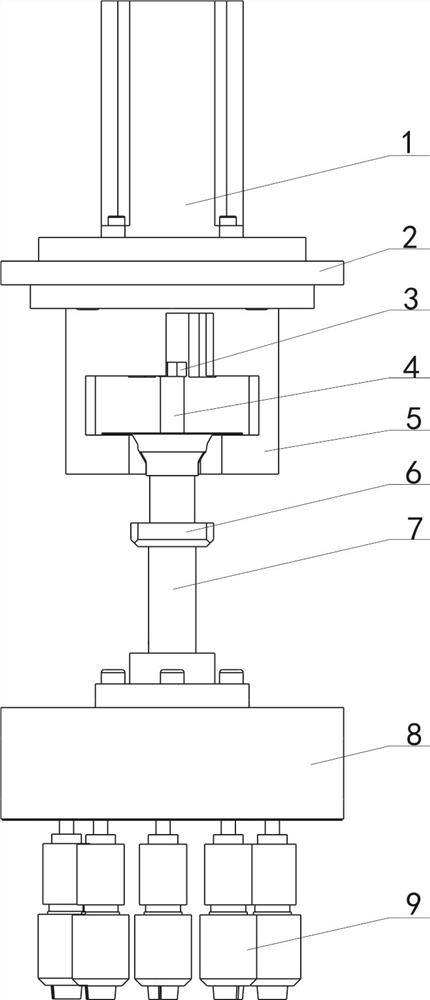
图1是本发明实施方式的结构示意图;
图2是图1的局部剖视结构示意图;
图3是本发明中机械手A的立体结构示意图;
图4是本发明中空心轴的剖视结构示意图;
图5是本发明采用键传动的结构示意图;
图6是本发明中传动套的立体结构示意图;
图7是本发明中中间传动盘的立体结构示意图;
图8是本发明采用齿轮传动的结构示意图;
图9是本发明中机械手过渡套的立体结构示意图;
图10是图9的俯视结构示意图;
图11是本发明中机械手B的立体结构示意图;
图12是本发明的应用示意图;
在图中:1、动力源;2、连接座;3、旋转横杆;4、旋转主轴;5、机械手;6、定位块;7、空心轴;8、籽晶旋转盘;9、籽晶夹头;10、连接螺钉;11、挂接块;12、横杆传动套;13、挂接块限位斜面;14、扩口;15、挂接块定位槽;16、挂接块导向槽;17、挂接块穿孔;18、导向锥面;19、限位斜面;20、定位平台;21、传动套;22、中间传动盘;23、主动键;24、中间传动盘穿孔;25、空心轴穿孔;26、螺钉固定孔;27、传动键;28、主动齿轮;29、从动齿轮;30、机械手过渡套;31、下过渡齿轮;32、齿轮轴;33、上过渡齿轮;34、从动齿轮穿孔;35、齿轮轴安装孔;36、弧形槽A;37、弧形槽B;38、料盘工位;39、弧形槽C;40、料盘。
【具体实施方式】
通过下面的实施例可以更详细的解释本发明,公开本发明的目的旨在保护本发明范围内的一切变化和改进,本发明并不局限于下面的实施例;
首先需要说明的是,本发明在描述结构时采用的“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、 “外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
结合附图1~12中所述的一种用于使籽晶转动的籽晶夹头的快速取放装置,包括动力源1、旋转主轴4、机械手5、定位块6、空心轴7和快接机构,如图1所示,所述旋转主轴4的下端连接籽晶旋转盘8的动力输入端,籽晶旋转盘8下面的动力输出端分别连接籽晶夹头9,在籽晶夹头9内分别夹持有籽晶,由于籽晶旋转盘8不是本发明保护的重点,且发明人以洛阳金诺机械工程有限公司的名义申报了专利,故再此不对其具体结构做详细累述(具体参见专利号201410169006.1,公开号CN103993353A,申请日期2014年4月18日,专利名称为一种使籽晶转动的籽晶夹头),在旋转主轴4的外缘面套接空心轴7,所述空心轴7的下端连接籽晶旋转盘8,在空心轴7上端的外缘面设有向外延伸的挂接块11,在挂接块11下方空心轴7的外缘面设有定位块6,挂接块11挂接在机械手5上,所述机械手5的上面设有动力源1,具体实施时,为了提高装置运行的稳定性,可以在机械手5的上面设置连接座2,在连接座2的上面设置动力源1,同时连接座2连接上轴提拉系统,实施时,动力源1为电机或液压马达或气动马达中的任意一种,其中优选电机,当选择电机时,电机优选耐高温电机,本发明在实施过程中,为了更好的保护电机,在电机的外部设有保护罩,所述保护罩的材质为耐高温材料,如四氟或不锈钢,同时在电机的电源线的外部设有保护套,所述电机外接电源,所述动力源1的主轴与旋转主轴4的上端通过快接机构连接,具体实施时,需保证旋转主轴4、空心轴7和机械手5同心设置。
如图1、2、4、5、8所示,挂接块11的作用主要是为了防止空心轴7随旋转主轴4一起旋转及连接机械手5并跟随机械手5一并上升和下降,具体实施时,可以将挂接块11设置为除圆形以外的任意形状,如方形、三角形、椭圆形等,当需要将挂接块11设置为圆形时,需要在挂接块11下方空心轴7的外缘面上设置定位平台20,这样挂接块11可以连接机械手5并跟随机械手5一并上升和下降,定位平台20就可以防止空心轴7随旋转主轴4一起旋转,当挂接块11设置为圆形时,可以在挂接块11的外缘面上设置用于导向的导向锥面18,
进一步,为了提高机械手5抓取的效率和准确程度,在所述挂接块11下面与空心轴7外缘面过渡处设有限位斜面19,这样可以实现导向和多级限位的目的。
如图1、2、3、5、8、11所示,所述机械手5为桶形结构,在机械手5的外缘面上设有挂接块穿孔17,挂接块穿孔17贯穿机械手5外缘面的左右两侧,在所述挂接块穿孔17的底部设有贯通至机械手5下面的挂接块定位槽15,挂接块定位槽15的作用就是带动挂接块11实现上升和下降,同时还需要防止空心轴7随旋转主轴4一起旋转,在实施过程中,为了能确保机械手5抓取的效率和准确程度,在挂接块定位槽15左右两侧的侧壁上分别设有上端大下端小的挂接块导向槽16,在挂接块导向槽16下面设有挂接块限位斜面13,实施时,导向锥面18、限位斜面19、定位平台20分别与挂接块导向槽16、挂接块限位斜面13、挂接块定位槽15接触配合,这样即实现了导向功能,又实现了限位和定位功能,进一步,为了提高抓取的准确性,在挂接块定位槽15的端部设置扩口14,确保空心轴7能顺利的进入预定位置。
如图1、2、4、12所示,所述快接机构包括旋转横杆3和横杆传动套12,所述横杆传动套12的上端连接动力源1的主轴,旋转横杆3设置在旋转主轴4的上端,所述旋转横杆3卡接在横杆传动套12下端头的卡槽内,实施时,旋转横杆3通过连接螺钉10固定在旋转主轴4的上端。
当快接机构采用上述结构时,当一组硅芯拉制完成后,旋转料盘40,此时空心轴7的下部穿过料盘40上的弧形槽C39进入预定的料盘工位38,然后下降机械手5,此时定位块6进入料盘工位38,当定位块6与料盘工位38接触后继续下降机械手5,然后旋转料盘38,此时旋转横杆3与横杆传动套12脱开,将已经拉制好的一组硅芯放置在料盘工位38上,重新抓取一组新的籽晶,当挂接块11进入到机械手5上的挂接块穿孔17后,提升机械手5,此时导向锥面18、限位斜面19、定位平台20分别与挂接块导向槽16、挂接块限位斜面13、挂接块定位槽15接触配合,扩口42可以起到导向的作用,此时机械手5带动空心轴7上的定位块6脱离料盘工位38,此时,旋转横杆3插入到横杆传动套12内并实现卡接,然后旋转料盘38,到达预定工位后,开始新一轮硅芯的拉制。
如图5、6、7、12所示,所述快接机构的替换结构为快接机构包括传动套21和中间传动盘22,所述传动套21的上端连接动力源1的主轴,实施时,传动套21的上端可以设置锁紧机构,这样通过锁紧螺钉就可以将传动套21固连在动力源1的主轴上,在传动套21的外缘面设有中间传动盘穿孔24,在中间传动盘穿孔24的底部设有空心轴穿孔25,在中间传动盘穿孔24的底面设有至少一个主动键23,中间传动盘22的中部设有螺钉固定孔26,然后在螺钉固定孔26内设置螺栓并通过螺栓将中间传动盘22固连在旋转主轴4的上端,在所述中间传动盘22的下面设有至少一个传动键27,所述传动键27与主动键23啮合实现动力传递。
当快接机构采用上述结构时,当一组硅芯拉制完成后,旋转料盘40,此时空心轴7的下部穿过料盘40上的弧形槽C39进入预定的料盘工位38,然后下降机械手5,此时定位块6进入料盘工位38,当定位块6与料盘工位38接触后继续下降机械手5,然后旋转料盘38,此时传动套21和中间传动盘22脱开,将已经拉制好的一组硅芯放置在料盘工位38上,重新抓取一组新的籽晶,当挂接块11进入到机械手5上的挂接块穿孔17后,提升机械手5,此时导向锥面18、限位斜面19、定位平台20分别与挂接块导向槽16、挂接块限位斜面13、挂接块定位槽15接触配合,扩口42可以起到导向的作用,此时机械手5带动空心轴7上的定位块6脱离料盘工位38,此时,传动套21上的主动键23与中间传动盘22上的传动键27啮合,然后旋转料盘38,到达预定工位后,开始新一轮硅芯的拉制。
如图8、9、10、11、12所示,所述快接机构的第二替换结构为快接机构包括主动齿轮28、从动齿轮29、机械手过渡套30、下过渡齿轮31、齿轮轴32和上过渡齿轮33,在所述机械手过渡套30的上面设有动力源1,在动力源1的主轴上套接主动齿轮28,所述主动齿轮28与上过渡齿轮33,所述上过渡齿轮33套接在齿轮轴32外缘面的上部 ,在齿轮轴32外缘面的下部设有下过渡齿轮31,由齿轮轴32、下过渡齿轮31和上过渡齿轮33组成从动轮机构,从动轮机构的中心轴线与机械手过渡套30的中心轴线平行,从动齿轮29套接在旋转主轴4的上端,所述下过渡齿轮31与从动齿轮29啮合实现动力传递。所述机械手过渡套30为桶形结构,在机械手过渡套30的外缘面上设有从动齿轮穿孔34,在从动齿轮穿孔34的底部设有贯通至机械手过渡套30下面的弧形槽A36,在弧形槽A36左侧或右侧或左右两侧设置齿轮轴安装孔35,这样就可以设置一套或两套从动轮机构,机械手过渡套30的下面设有机械手5。如图11所示,机械手5需设置为分体结构,这样才能保证旋转主轴4穿行,即在所述机械手5的上面设有弧形槽B37使机械手5形成分体结构,所述弧形槽B37与弧形槽A36对应设置。
当快接机构采用上述结构时,当一组硅芯拉制完成后,旋转料盘40,此时空心轴7的下部穿过料盘40上的弧形槽C39进入预定的料盘工位38,然后下降机械手5,此时定位块6进入料盘工位38,当定位块6与料盘工位38接触后继续下降机械手5,然后旋转料盘38,此时从动齿轮29与下过渡齿轮31脱开,将已经拉制好的一组硅芯放置在料盘工位38上,重新抓取一组新的籽晶,当挂接块11进入到提升机械手5上的挂接块穿孔17时,旋转主轴4一并穿过设置在机械手过渡套30上设置的从动齿轮穿孔34、弧形槽A36和机械手5上设置的弧形槽B37,然后旋转主轴4上的从动齿轮29与下过渡齿轮31啮合,提升机械手5,此时导向锥面18、限位斜面19、定位平台20分别与挂接块导向槽16、挂接块限位斜面13、挂接块定位槽15接触配合,扩口42可以起到导向的作用,此时机械手5带动空心轴7上的定位块6脱离料盘工位38,然后旋转料盘38,到达预定工位后,开始新一轮硅芯的拉制。
本发明中快接机构还可以采用伞形齿轮传动、锥形齿轮传动、蜗轮蜗杆传动、花键孔与花键轴传动等结构。
以上内容中未细述部份为现有技术,故未做细述。
为了公开本发明的目的而在本文中选用的实施例,当前认为是适宜的,但是,应了解的是,本发明旨在包括一切属于本构思和发明范围内的实施例的所有变化和改进。
- 一种用于使籽晶转动的籽晶夹头的快速取放装置
- 一种用于使籽晶转动的籽晶夹头的快速取放装置