AVG搬运机器人的设计方法、AVG搬运机器人
文献发布时间:2023-06-19 09:27:35
技术领域
本申请涉及一种智能制造装备产业(工业机器人)领域,更具体地说,尤其涉及AVG搬运机器人的设计方法、AVG搬运机器人。
背景技术
现有技术中,关于搬运机器人已有充分的研究。例如:CN109878401A、CN106737698A、 CN105094130A等。
然而,上述搬运机器人无法搬运卷料。对此,申请人同日申请“一种智能化搬运机器人”(系列申请中的基础专利),其主要解决的问题是:从承载轴到移动轴上的卷料如何移动。其核心构思在于:提出了“卷料放置器”、“第一组卡接装置组件”、“第二组卡接装置组件”的构思。
但是,如何设计该智能化搬运机器人,则没有研究过。
发明内容
本申请的目的在于针对上述现有技术的不足,提供AVG搬运机器人的设计方法、AVG 搬运机器人。
本申请的技术方案如下:
一种AVG搬运机器人的设计方法,a表示插压部突出于移动轴的长度,b表示第一轴向推动杆的前端部距离承载轴的前端部的长度,c表示卡接装置突出与承载轴表面的距离,L 表示轴向位移调节杆的长度,,θ
已知:c,求a、b、L、θ
其设计步骤如下:
S1,确定a、b;
S2,确定L;
S3,确定θ
进一步,S1步骤中,包括以下内容:S1-1,确定b,b取5~50cm;S1-2,确定a,a取 b+c+(0~100)cm。
进一步,S2步骤中,包括以下内容:L取任意满足:L≥a-b条件的数值。
一种使用前述的AVG搬运机器人的设计方法设计的AVG搬运机器人。
一种AVG搬运机器人,其包括:移动轴,还包括:承载轴、卷料;所述卷料缠绕在承载轴上;
其中,承载轴与移动轴的直径相同;
其中,承载轴悬臂设置在悬臂轴固定板上;
还包括:水平设置的卷料推力动力机构;卷料推力动力机构设置在悬臂轴固定板或者移动轴上,卷料推力动力机构的数量为多个,且呈环形阵列排布。
一种AVG搬运机器人,其包括:移动轴;
还包括:承载轴、卷料,所述卷料缠绕在承载轴上;
还包括:卷料放置器;
卷料放置器从左向右依次包括:第一圆筒、卷料放置器第一圆盘、第二圆筒、卷料放置器第二圆盘、第三圆筒;所述第二圆筒用来放置卷料;所述承载轴的外表面设置有多个通道,所述多个通道环形阵列布置;所述移动轴的外表面设置有多个通道,所述多个通道也呈环形阵列布置;承载轴的通道的数量与移动轴设置的通道的数量相同,且承载轴的通道的数量与移动轴设置的通道的位置对应;第一圆筒、第二圆筒、第三圆筒的内表面设置有均布置有滑动轮,所述滑动轮环形阵列布置;所述第一圆筒、第二圆筒、第三圆筒的内表面布置的滑动轮的数量与承载轴的通道的数量相同,所述第一圆筒、第二圆筒、第三圆筒的内表面布置的滑动轮与承载轴、移动轴的通道适配;通过滑动轮、承载轴的通道、移动轴的通道,能够方便的移动卷料放置器;通过环向阵列设置的通道来限定卷料放置器不会产生转动;
其中,承载轴采用中空结构;
第一圆筒、第三圆筒的表面设置有插孔,所述第一圆筒的插孔呈环形阵列;
在承载轴中设置有两组卡接装置组件:第一组卡接装置组件,第二组卡接装置组件、第一轴向推动杆、第二轴向推动杆、第三轴向推动杆、第四轴向推动杆;
其中,第一轴向推动杆、第二轴向推动杆、第三轴向推动杆、第四轴向推动杆顺序连接固定,四者共同构成了轴向推动杆;
其中,所述第一组卡接装置组件与第一圆筒的插孔对应,所述第二组卡接装置组件与第三圆筒的插孔对应;
其中,所述第一组卡接装置组件包括多个卡接装置,其沿着承载轴呈环形阵列分布;第一组卡接装置组件的卡接装置包括:径向插接槽、径向插接杆、径向受压弹簧、轴向位移调节杆;所述径向插接槽,其方向为沿着承载轴的径向方向设置,即径向插接槽的轴向方向与承载轴的中轴线方向垂直;径向插接杆包括:径向插接杆第一段、径向插接杆第二段、径向插接杆第三段;所述径向插接杆第一段、径向插接杆第二段、径向插接杆第三段顺序连接,所述径向插接杆第一段、径向插接杆第二段、径向插接杆第三段构成“十”形;径向插接杆第二段的宽度大于径向插接杆第一段的宽度,径向插接杆第二段的宽度大于径向插接杆第三段的宽度;径向插接槽的宽度与径向插接杆第二段的宽度适配,在径向插接槽的两端均设置有开孔,即第一端的开孔供径向插接杆第一段穿过,第二端的开孔供径向插接杆第三段穿过;径向插接杆第一段穿过径向插接槽的第一端的开口,进而进入到第一圆筒的插孔中;在径向插接槽的第二端与径向插接杆第二段之间设置有弹簧,所述弹簧在初始状态下,保持压缩状态;
初始状态下,径向插接杆第三段的端部穿过径向插接槽的第二端的开孔,进入到承载轴的内部;轴向位移调节杆的一端铰接在径向插接杆第三段的一端,具体而言,是铰接在径向插接杆第三段进入承载轴内部一侧的端部,轴向位移调节杆的另一端与第二轴向推动杆的前部铰接。
进一步,所述第二组卡接组件包括多个卡接装置,其构造与第一组卡接装置组件的构造相同,区别仅在于,径向插接杆第三段的端部穿过径向插接槽的第二端的开孔,进入到承载轴的内部;是铰接在径向插接杆第三段进入承载轴内部一侧的端部,轴向位移调节杆的另一端与第四轴向推动杆的前部铰接。
进一步,所述第二组卡接组件包括多个卡接装置,其沿着承载轴呈环形阵列分布;第二组卡接组件的卡接装置包括:径向插接槽、径向插接杆、径向受压弹簧、轴向位移调节杆;所述径向插接槽,其方向为沿着承载轴的径向方向设置;径向插接杆包括:径向插接杆第一段、径向插接杆第二段、径向插接杆第三段;所述径向插接杆第一段、径向插接杆第二段、径向插接杆第三段顺序连接,所述径向插接杆第一段、径向插接杆第二段、径向插接杆第三段构成“十”形;径向插接杆第二段的宽度大于径向插接杆第一段的宽度,径向插接杆第二段的宽度大于径向插接杆第三段的宽度;径向插接槽的宽度与径向插接杆第二段的宽度适配,在径向插接槽的两端均设置有开孔,即第一端的开孔供径向插接杆第一段穿过,第二端的开孔供径向插接杆第三段穿过;径向插接杆第一段穿过径向插接槽的第一端的开口,进而进入到第三圆筒的插孔中;在径向插接槽的第二端与径向插接杆第二段之间设置有弹簧,所述弹簧在初始状态下,保持压缩状态;
初始状态下,径向插接杆第三段的端部穿过径向插接槽的第二端的开孔,进入到承载轴的内部;轴向位移调节杆的一端铰接在径向插接杆第三段的一端,具体而言,是铰接在径向插接杆第三段进入承载轴内部一侧的端部,轴向位移调节杆的另一端与第四轴向推动杆的前部铰接。
进一步,还包括:框架结构、第一移动平台、第二移动平台、X轴定位单元、Y轴定位单元、Z轴定位单元、移动轴;
其中,所述框架结构包括:4根立柱、2根上横梁、2根下横梁、2根纵梁;2根上横梁相互平行,2根纵梁相互平行,上横梁的端部设置在立柱的顶端,纵梁设置在2根上横梁之间;2根下横梁用于连接立柱的下部;所述上横梁的顶部与纵梁的顶部成一平面;
第二移动平台包括:第二移动平台第一部、第二移动平台第二部,第二移动平台第三部,所述第二移动平台第二部为竖向板,其设置在第一移动平台的前侧;在第二移动平台第二部的前方设置水平的第二移动平台第三部;
X轴定位单元1包括设置在上横梁上的X轴向动力机构,所述X轴向动力机构能够推动第一移动平台在X轴向运动;第一移动平台的下部设置有T型导槽,在上横梁的上表面设置有沿着上横梁轴向方向延伸的T型导轨(即X轴方向),所述第一移动平台的T型导槽与上横梁设置的T型导轨适配,上横梁设置的T型导轨插入到第一移动平台的T型导槽中;
Y轴定位单元包括设置在第一移动平台上的Y轴向动力机构,所述Y轴向动力机构能够推动第二移动平台在X轴向运动;第二移动平台第一部的下部设置有T型导槽,在第一移动平台的上表面设置有沿着第二移动平台第一部轴向方向延伸的T型导轨,所述第二移动平台第一部的T型导槽与第一移动平台设置的T型导轨适配,第一移动平台的T型导轨插入到第二移动平台第一部的T型导槽中;
Z轴定位单元包括:设置在第二移动平台第三部上的Z轴向动力机构,所述Z轴向动力机构能够推动移动轴在Z轴向运动;第二移动平台第二部的前侧面设置有T型导槽,在移动轴的端面设置有沿着第二移动平台第二部竖向方向延伸的T型导轨,所述第二移动平台第二部的前侧面设置有T型导槽与移动轴的T型导轨适配,移动轴的T型导轨插入到第二移动平台第二部的T型导槽中;
通过X轴定位单元,能够调节移动轴的X向位置;
通过Y轴定位单元,能够调节移动轴的Y向位置;
通过Z轴定位单元,能够调节移动轴的Z向位置。
进一步,还包括:框架结构、第一移动平台、第二移动平台、X轴定位单元、Y轴定位单元、Z轴定位单元
其中,X轴定位单元采用伺服系统驱动主动带轮做旋转运动,由主动带轮通过圆弧齿同步带驱动从动轮转动,主动轮、从动轮一起驱动同步带做往复运动,最终由同步带驱动第一移动平台在直线导轨上做平行往复运动;
其中,Y轴定位单元采用伺服驱动系统驱动滚珠丝杠结构;伺服电机通过减速机驱动滚珠丝杠转动,由设置在第一移动平台上的滚珠丝母驱动第二移动平台做平行往复运动;
其中,Z轴定位单元采用伺服驱动系统驱动滚珠丝杠结构;伺服电机通过减速机驱动滚珠丝杠转动,由设置在第二移动平台上的滚珠丝母驱动移动轴做平行往复运动;
通过X轴定位单元,能够调节移动轴的X向位置;
通过Y轴定位单元,能够调节移动轴的Y向位置;
通过Z轴定位单元,能够调节移动轴的Z向位置。
进一步,还包括:卷料推力动力机构,在移动轴的端部设置有端部固定板;
所述卷料推力动力机构水平悬臂设置在移动轴的端部固定板上,在卷料推力动力机构的端部设置有吸盘。
本申请的有益效果在于:
第一,本申请给出了两种智能化搬运机器人的设计,即实施例一、实施例二,其实现了智能化搬运过程。
第二,本申请的第二个发明构思在于:在承载轴7悬臂设置在悬臂轴固定板上,在悬臂轴固定板上设置有水平的卷料推力动力机构8(液压杆或气杆),特别的,卷料推力动力机构8的数量为多个,且沿着承载轴的中心呈环形阵列排布;其技术效果在于:能够实现卷料移动的自动化。
第三,本申请的第三个发明构思在于:发现了“卷料凹陷的问题”,具体而言,在卷料 11从承载轴7移动到移动轴6上时,如图10所述,卷料发生凹陷,影响后续卷料的使用。但是,上述问题确在实施例一、二中并未出现,发明人在分析原因,认为:实施例一、二是采用人工移动,其受力点不像实施例三那样,集中在一点。针对该技术问题,在多个卷料推力动力机构8的前方设置一推动盘,即多个卷料推力动力机构8的端部均连接一推动盘8-1;推动盘的中心设置有孔洞,以便承载轴7通过;设置推动盘8的意义在于,减少应力集中,进而避免前述的卷料凹陷。
第四,本申请的第四个发明构思在于:实施例五的方案
具体改进之处主要体现在以下三处(这三个特征是相互关联的,是个整体,此处分开表述只是为了更方便说明):
4.1本申请提出了:卷料放置器的概念。
4.2本申请提出了:第一组卡接装置组件包括多个卡接装置,其沿着承载轴呈环形阵列分布;第一组卡接装置组件的卡接装置包括:径向插接槽、径向插接杆、径向受压弹簧、轴向位移调节杆;所述径向插接槽,其方向为沿着承载轴的径向方向设置,即径向插接槽的轴向方向与承载轴的中轴线方向垂直;径向插接杆包括:径向插接杆第一段、径向插接杆第二段、径向插接杆第三段;所述径向插接杆第一段、径向插接杆第二段、径向插接杆第三段顺序连接,所述径向插接杆第一段、径向插接杆第二段、径向插接杆第三段构成“十”形;径向插接杆第二段的宽度大于径向插接杆第一段的宽度,径向插接杆第二段的宽度大于径向插接杆第三段的宽度;径向插接槽的宽度与径向插接杆第二段的宽度适配,在径向插接槽的两端均设置有开孔,即第一端的开孔供径向插接杆第一段穿过,第二端的开孔供径向插接杆第三段穿过;径向插接杆第一段穿过径向插接槽的第一端的开口,进而进入到第一圆筒的插孔中;在径向插接槽的第二端与径向插接杆第二段之间设置有弹簧,所述弹簧在初始状态下,保持压缩状态。
4.3本申请提出了:第二组卡接装置组件的设计。
第五,本申请的第五个发明构思在于:
第一类智能化搬运机器人的工作方法
首先,移动轴与承载轴对中、解锁:启动X轴定位单元、Y轴定位单元、Z轴定位单元,调节移动轴的位置,使得移动轴与承载轴对应接触:将移动轴的插压部插入到承载轴的插口中,插压部与第一轴向推动杆接触,且推动第一轴向推动杆产生大小为a-b的位移;
第一轴向推动杆受压挤压移动时,第二轴向推动杆、第三轴向推动杆、第四轴向推动杆也产生大小为a-b的位移;
此时,第一组卡接装置组件,第二组卡接装置组件的卡接装置的径向插接杆2向内移动到径向插接槽中;
其次,卷料从承载轴移动到移动轴上:启动卷料推力动力机构,将卷料从承载轴7推动到移动轴上;
再然后,移动轴与承载轴分离;
其中,插压部突出于移动轴的长度为a,第一轴向推动杆的前端部距离承载轴的前端部的长度为b。
第二类智能化搬运机器人的工作方法,
卷料放置器从承载轴移动到移动轴时,包括以下步骤:首先,移动轴与承载轴对中、解锁:启动X轴定位单元、Y轴定位单元、Z轴定位单元,调节移动轴的位置,使得移动轴与承载轴对应接触:将移动轴的插压部插入到承载轴的插口中,插压部与第一轴向推动杆接触,且推动第一轴向推动杆产生大小为a-b的位移;第一轴向推动杆受压挤压移动时,第二轴向推动杆、第三轴向推动杆、第四轴向推动杆也产生大小为a-b的位移;此时,第一组卡接装置组件,第二组卡接装置组件的卡接装置的径向插接杆向内移动到径向插接槽中;
其次,卷料放置器从承载轴移动到移动轴上:启动卷料推力动力机构,卷料推力动力机构伸长直至卷料推力动力机构的吸盘接触到卷料放置器第一圆盘,启动吸盘,然后卷料推力动力机构缩短,将卷料从承载轴拉到移动轴上;
卷料放置器从承载轴移动到移动轴时的工作方法为:
首先,移动轴与承载轴对中、卡接装置向内移动:启动X轴定位单元、Y轴定位单元、Z轴定位单元,调节移动轴的位置,使得移动轴与承载轴对应接触:将移动轴的插压部插入到承载轴的插口中,插压部与第一轴向推动杆接触,且推动第一轴向推动杆产生大小为a-b的位移;第一轴向推动杆受压挤压移动时,第二轴向推动杆、第三轴向推动杆、第四轴向推动杆也产生大小为a-b的位移;此时,第一组卡接装置组件,第二组卡接装置组件的卡接装置的径向插接杆向内移动到径向插接槽中;
其次,卷料放置器从移动轴移动到承载轴上:启动卷料推力动力机构,卷料推力动力机构伸长直至卷料放置器到达预设位置,然后卷料推力动力机构缩短至初始状态;
再次,移动轴与承载轴分离、加锁:启动X轴定位单元,使移动轴的插压部从承载轴的插口中抽出,插压部与第一轴向推动杆不再接触,第一组卡接装置组件,第二组卡接装置组件的卡接装置在径向受压弹簧的作用下,径向受压弹簧推动径向插接杆向外移动,第一组卡接装置组件,第二组卡接装置组件的卡接装置分别插入到第一圆筒、第三圆筒的插孔中;
其中,插压部突出于移动轴的长度为a,第一轴向推动杆的前端部距离承载轴的前端部的长度为b。
第六,本申请的第六个发明构思在于,提出了一种AVG搬运机器人的设计方法,具体如下:
已知:c,求a、b、L、θ
其中,a表示插压部突出于移动轴的长度,b表示第一轴向推动杆的前端部距离承载轴的前端部的长度,c表示卡接装置突出与承载轴表面的距离,L表示轴向位移调节杆的长度,,θ
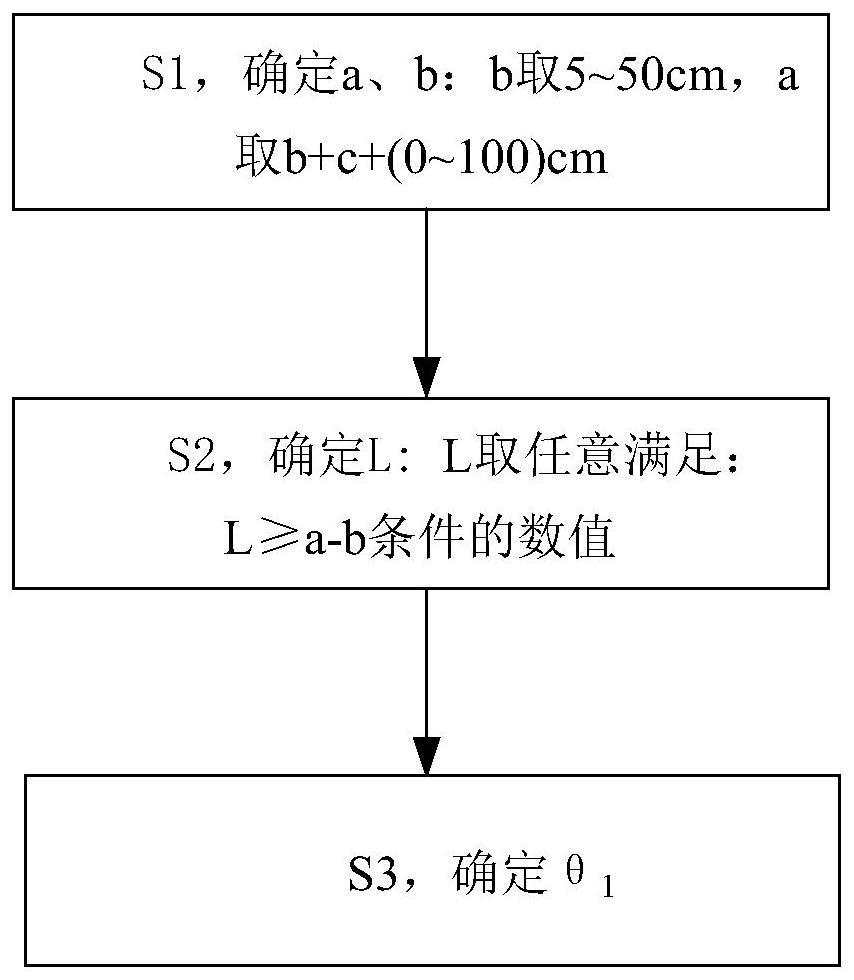
首先,确定a、b:b取5~50cm,a取b+c+(0~100)cm;
然后,确定L,其中L取任意满足:L≥a-b条件的数值;
再次,确定θ
附图说明
下面结合附图中的实施例对本申请作进一步的详细说明,但并不构成对本申请的任何限制。
图1是实施例1的智能化搬运机器人的X轴定位单元、Y轴定位单元、第一移动平台、第二移动平台的平面俯视示意图。
图2实施例1的智能化搬运机器人的Z轴定位单元的竖向示意图。
图3是实施例1的移动轴与承载轴的竖向设计图。
图4是实施例2的智能化搬运机器人的三维设计示意图。
图5是实施例2的智能化搬运机器人的平面设计示意图。
图6是实施例2的智能化搬运机器人的竖向设计示意图。
图7是实施例2的智能化搬运机器人在另一视角下的竖向设计示意图。
图8是实施例2的智能化搬运机器人的移动轴(工业上称为:悬臂轴夹具)的三维设计示意图。
图9是实施例3的智能化搬运机器人的承载轴-移动轴的设计示意图。
图10是实施例3中在实施中的卷料所存在的问题。
图11是实施例4的智能化搬运机器人的承载轴-移动轴的设计示意图。
图12是实施例4在实施中的卷料所存在的问题。
图13是实施例5的承载轴、移动轴设置的多个通道,卷料放置器设置滑动轮的设计示意图。
图14是实施例5的卷料放置器9的设计示意图。
图15是实施例5的卷料放置器的左视图。
图16是实施例5的第一组卡接装置组件7-1、第二组卡接组件7-2处于加锁时的设计示意图。
图17是实施例5的第一组卡接装置组件7-1、第二组卡接组件7-2处于解锁时的设计示意图。
图18是实施例5的卡接装置的设计示意图。
图19是实施例5的径向插接杆7-1-2的设计示意图。
图20是实施例5的轴向位移调节杆7-1-4与第二轴向推动杆10-2或第四轴向推动杆10-4 铰接连接座的设计示意图(左视图)。
图21是实施例6的智能化搬运机器人的承载轴-移动轴的设计示意图。
图22是AVG搬运机器人的设计方法的流程图。
图1-22附图标记说明如下:
X轴定位单元1、Y轴定位单元2、Z轴定位单元3、第一移动平台4-1、第二移动平台4-2、框架结构5、移动轴6,承载轴7;
第二移动平台第一部4-2-1、第二移动平台第二部4-2-2,第二移动平台第三部4-2-3;
移动轴的通道6-1、承载轴7的通道7-5;
第一组卡接装置组件7-1,第二组卡接装置组件7-2、径向插接槽7-1-1、径向插接杆7-1-2、径向受压弹簧7-1-3、轴向位移调节杆7-1-4;
径向插接杆第一段7-1-2-1、径向插接杆第二段7-1-2-2、径向插接杆第三段7-1-2-3;
卷料推力动力机构8,推动盘8-1;
卷料放置器9、卷料放置器第一圆盘9-1、卷料放置器第二圆盘9-2、第一圆筒9-3、第二圆筒9-4、第三圆筒9-5;
第一轴向推动杆10-1、第二轴向推动杆10-2、第三轴向推动杆10-3、第四轴向推动杆10-4;
卷料11。
具体实施方式
实施例1,参阅图1至图3所述,一种智能化搬运机器人,其包括:框架结构5、第一移动平台4-1、第二移动平台4-2、X轴定位单元1、Y轴定位单元2、Z轴定位单元3、移动轴 6;
其中,所述框架结构5包括:4根立柱、2根上横梁、2根下横梁、2根纵梁;2根上横梁相互平行,2根纵梁相互平行,上横梁的端部设置在立柱4的顶端,纵梁设置在2根上横梁之间;2根下横梁用于连接立柱的下部;所述上横梁的顶部与纵梁的顶部成一平面(即齐平);
第二移动平台4-2包括:第二移动平台第一部4-2-1、第二移动平台第二部4-2-2,第二移动平台第三部4-2-3,所述第二移动平台第二部4-2-2为竖向板,其设置在第一移动平台 4-1的前侧;在第二移动平台第二部4-2-2的前方设置水平的第二移动平台第三部4-2-3(水平板状);
如图1所述,X轴定位单元1包括设置在上横梁上的X轴向动力机构(液压杆或气杆),所述X轴向动力机构能够推动第一移动平台4-1在X轴向运动;第一移动平台4-1的下部设置有T型导槽,在上横梁的上表面设置有沿着上横梁轴向方向延伸的T型导轨(即X轴方向),所述第一移动平台4-1的T型导槽与上横梁设置的T型导轨适配,上横梁设置的T型导轨插入到第一移动平台4-1的T型导槽中;
Y轴定位单元2包括设置在第一移动平台4-1上的Y轴向动力机构,所述Y轴向动力机构(液压杆或气杆)能够推动第二移动平台4-2在X轴向运动;第二移动平台第一部4-2-1的下部设置有T型导槽,在第一移动平台4-1的上表面设置有沿着第二移动平台第一部4-2-1 轴向方向延伸的T型导轨(即Y轴方向),所述第二移动平台第一部4-2-1的T型导槽与第一移动平台4-1设置的T型导轨适配,第一移动平台4-1的T型导轨插入到第二移动平台第一部4-2-1的T型导槽中;
Z轴定位单元3包括:设置在第二移动平台第三部4-2-3上的Z轴向动力机构3,所述Z 轴向动力机构(液压杆或气杆)能够推动移动轴6在Z轴向运动;第二移动平台第二部4-2-2 的前侧面设置有T型导槽,在移动轴6的端面设置有沿着第二移动平台第二部4-2-2竖向方向延伸的T型导轨(即Z轴方向),所述第二移动平台第二部4-2-2的前侧面设置有T型导槽与移动轴6的T型导轨适配,移动轴6的T型导轨插入到第二移动平台第二部4-2-2的T 型导槽中。
通过X轴定位单元1,能够调节移动轴6的X向位置;
通过Y轴定位单元2,能够调节移动轴6的Y向位置;
通过Z轴定位单元3,能够调节移动轴6的Z向位置.
还包括:承载轴7、卷料11;所述卷料缠绕在承载轴7上;
其中,承载轴7与移动轴6的直径相同。
本申请的智能化搬运机器人的工作方法在于:
首先,启动X轴定位单元1、Y轴定位单元2、Z轴定位单元3,调节移动轴6的位置,使得移动轴6与承载轴7对应接触;
其次,所述卷料11放置在承载轴7,将卷料从承载轴7推到移动轴6上。
实施例二:如图4-8所示,一种智能化搬运机器人,其包括:框架结构5、第一移动平台4-1、第二移动平台4-2、X轴定位单元1、Y轴定位单元2、Z轴定位单元3、移动轴6;
其中,X轴定位单元1采用伺服系统驱动主动带轮做旋转运动,由主动带轮通过圆弧齿同步带驱动从动轮转动,主动轮、从动轮一起驱动同步带做往复运动,最终由同步带驱动第一移动平台4-1在直线导轨上做平行往复运动(沿着X轴);
其中,Y轴定位单元2采用伺服驱动系统驱动滚珠丝杠结构;伺服电机通过减速机驱动滚珠丝杠转动,由设置在第一移动平台4-1上的滚珠丝母驱动第二移动平台4-2做平行往复运动(沿着Y轴);
其中,Z轴定位单元3采用伺服驱动系统驱动滚珠丝杠结构;伺服电机通过减速机驱动滚珠丝杠转动,由设置在第二移动平台4-2上的滚珠丝母驱动移动轴6做平行往复运动(Z 轴)。
通过X轴定位单元1,能够调节移动轴6的X向位置;
通过Y轴定位单元2,能够调节移动轴6的Y向位置;
通过Z轴定位单元3,能够调节移动轴6的Z向位置.
还包括:承载轴7、卷料11;所述卷料缠绕在承载轴7上;
其中,承载轴7与移动轴6的直径相同。
本申请的智能化搬运机器人的工作方法在于:
首先,启动X轴定位单元1、Y轴定位单元2、Z轴定位单元3,调节移动轴6的位置,使得移动轴6与承载轴7对应接触;
其次,所述卷料11放置在承载轴7,将卷料从承载轴7推到移动轴6上。
实施例三,实施一、实施例二在将卷料从承载轴7推到移动轴6上时,其依赖于人工搬运;效率低下。
因此,做出如下改进:
如图9所示,承载轴7悬臂设置在悬臂轴固定板上,在悬臂轴固定板上设置有水平的卷料推力动力机构8(液压杆或气杆),特别的,卷料推力动力机构8的数量为多个,且沿着承载轴的中心呈环形阵列排布。
实施例三的工作方法在于:
首先,启动X轴定位单元1、Y轴定位单元2、Z轴定位单元3,调节移动轴6的位置,使得移动轴6与承载轴7对应接触;
其次,卷料11从承载轴7移动到移动轴6上:启动卷料推力动力机构8,将卷料从承载轴7推动到移动轴6上。
实施例四,发明人团队在开展实施例三的方案时,发现了如下技术问题:
在卷料11从承载轴7移动到移动轴6上时,如图10所述,卷料发生凹陷,影响后续卷料的使用。
但是,上述问题确在实施例一、二中并未出现,发明人在分析原因,认为:实施例一、二是采用人工移动,其受力点不像实施例三那样,集中在一点。
因此,实施例四采用如图11的方案,在多个卷料推力动力机构8的前方设置一推动盘,即多个卷料推力动力机构8的端部均连接一推动盘8-1;推动盘的中心设置有孔洞,以便承载轴7通过;
设置推动盘8的意义在于,减少应力集中,进而避免前述的卷料凹陷。
实施例五,发明人团队在开展实施例四的方案时,发现了如下技术问题:
确实与所预期的那样,卷料在从承载轴7移动到移动轴6上移动过程中,很少发生凹陷等问题,但是会发生错位问题(如图12所示)。
但是,上述问题确在实施例一、二中并未出现,发明人在分析原因,认为:实施例一、二是采用人工移动,其移动的速率慢并且手的作用点靠近承载轴7;因此,不会像实施例四那样,发生底部错位问题;该问题的原因有2个:1是卷料底部与承载轴7会发生摩擦力的作用,2是虽然采用了推动盘,推动盘对卷料的作用为面接触,但是推动盘毕竟是与承载轴7之间留有些许缝隙,其作用力很难在与承载轴7接触的那面。
针对上述问题,改进的思想是:如何使得推动力的作用点尽可能接近承载轴。
然而,发明人团队在具体实施过程中,上述问题的改进非常困难,一直没有接近问题,一般是采用承载轴上涂油,使得卷料-承载轴尽可能的光滑,以较少摩擦。
为了解决上述问题,发明人团队打破了技术偏见,采用了如下的方式:
还包括:卷料放置器9;卷料放置器9从左向右依次包括:第一圆筒9-3、卷料放置器第一圆盘9-1、第二圆筒9-4、卷料放置器第二圆盘9-2、第三圆筒9-5;
所述第二圆筒9-4用来放置卷料;
所述承载轴7的外表面设置有多个通道7-5,所述多个通道7-5环形阵列布置;
所述移动轴6的外表面设置有多个通道6-1,所述多个通道6-1也呈环形阵列布置;
承载轴7的通道的数量与移动轴6设置的通道的数量相同,且承载轴7的通道的数量与移动轴6设置的通道的位置对应;
第一圆筒9-3、第二圆筒9-4、第三圆筒9-5的内表面设置有均布置有滑动轮,所述滑动轮环形阵列布置;所述第一圆筒9-3、第二圆筒9-4、第三圆筒9-5的内表面布置的滑动轮的数量与承载轴7的通道的数量相同(与移动轴6的通道的数量相同),所述第一圆筒9-3、第二圆筒9-4、第三圆筒9-5的内表面布置的滑动轮与承载轴7、移动轴6的通道适配。
通过滑动轮、承载轴的通道、移动轴的通道,能够方便的移动卷料放置器9。
通过环向阵列设置的通道来限定卷料放置器9不会产生转动。
承载轴7采用中空结构。
更加特别的,第一圆筒9-3、第三圆筒9-5的表面设置有插孔,所述第一圆筒9-3的插孔呈环形阵列;
对应的,在承载轴7(圆柱体结构)中设置有两组卡接装置组件:第一组卡接装置组件 7-1,第二组卡接装置组件7-2、第一轴向推动杆10-1、第二轴向推动杆10-2、第三轴向推动杆10-3、第四轴向推动杆10-4;
其中,第一轴向推动杆10-1、第二轴向推动杆10-2、第三轴向推动杆10-3、第四轴向推动杆10-4顺序连接固定,四者共同构成了轴向推动杆;
其中,所述第一组卡接装置组件7-1与第一圆筒9-3的插孔对应,所述第二组卡接装置组件7-2与第三圆筒9-5的插孔对应;
其中,所述第一组卡接装置组件7-1包括多个卡接装置,其沿着承载轴7呈环形阵列分布;第一组卡接装置组件7-1的卡接装置包括:径向插接槽7-1-1、径向插接杆7-1-2、径向受压弹簧7-1-3、轴向位移调节杆7-1-4;所述径向插接槽7-1-1,其方向为沿着承载轴7的径向方向设置(即径向插接槽7-1-1的轴向方向与承载轴7的中轴线方向垂直);径向插接杆7-1-2包括:径向插接杆第一段7-1-2-1、径向插接杆第二段7-1-2-2、径向插接杆第三段7-1-2-3;所述径向插接杆第一段7-1-2-1、径向插接杆第二段7-1-2-2、径向插接杆第三段7-1-2-3顺序连接,所述径向插接杆第一段7-1-2-1、径向插接杆第二段7-1-2-2、径向插接杆第三段7-1-2-3 构成“十”形;径向插接杆第二段7-1-2-2的宽度大于径向插接杆第一段7-1-2-1的宽度,径向插接杆第二段7-1-2-2的宽度大于径向插接杆第三段7-1-2-3的宽度;径向插接槽7-1-1的宽度与径向插接杆第二段7-1-2-2的宽度适配,在径向插接槽7-1-1的两端均设置有开孔,即第一端的开孔供径向插接杆第一段7-1-2-1穿过,第二端的开孔供径向插接杆第三段7-1-2-3 穿过;径向插接杆第一段7-1-2-1穿过径向插接槽7-1-1的第一端的开口,进而进入到第一圆筒9-3的插孔中;在径向插接槽7-1-1的第二端与径向插接杆第二段7-1-2-2之间设置有弹簧,所述弹簧在初始状态下,保持压缩状态。初始状态下,径向插接杆第三段7-1-2-3的端部穿过径向插接槽7-1-1的第二端的开孔,进入到承载轴7的内部;轴向位移调节杆7-1-4的一端铰接在径向插接杆第三段7-1-2-3的一端,具体而言,是铰接在径向插接杆第三段7-1-2-3进入承载轴7内部一侧的端部,轴向位移调节杆7-1-4的另一端与第二轴向推动杆10-2的前部铰接。
其中,所述第二组卡接组件7-2包括多个卡接装置(其构造与第一组卡接装置组件7-1 的构造相同,区别仅在于,径向插接杆第三段7-1-2-3的端部穿过径向插接槽7-1-1的第二端的开孔,进入到承载轴7的内部;是铰接在径向插接杆第三段7-1-2-3进入承载轴7内部一侧的端部,轴向位移调节杆7-1-4的另一端与第四轴向推动杆10-4的前部铰接),其沿着承载轴7呈环形阵列分布;第二组卡接组件7-2的卡接装置包括:径向插接槽7-1-1、径向插接杆 7-1-2、径向受压弹簧7-1-3、轴向位移调节杆7-1-4;所述径向插接槽7-1-1,其方向为沿着承载轴7的径向方向设置(即径向插接槽7-1-1的轴向方向与承载轴7的中轴线方向垂直);径向插接杆7-1-2包括:径向插接杆第一段7-1-2-1、径向插接杆第二段7-1-2-2、径向插接杆第三段7-1-2-3;所述径向插接杆第一段7-1-2-1、径向插接杆第二段7-1-2-2、径向插接杆第三段7-1-2-3顺序连接,所述径向插接杆第一段7-1-2-1、径向插接杆第二段7-1-2-2、径向插接杆第三段7-1-2-3构成“十”形;径向插接杆第二段7-1-2-2的宽度大于径向插接杆第一段 7-1-2-1的宽度,径向插接杆第二段7-1-2-2的宽度大于径向插接杆第三段7-1-2-3的宽度;径向插接槽7-1-1的宽度与径向插接杆第二段7-1-2-2的宽度适配,在径向插接槽7-1-1的两端均设置有开孔,即第一端的开孔供径向插接杆第一段7-1-2-1穿过,第二端的开孔供径向插接杆第三段7-1-2-3穿过;径向插接杆第一段7-1-2-1穿过径向插接槽7-1-1的第一端的开口,进而进入到第三圆筒9-5的插孔中;在径向插接槽7-1-1的第二端与径向插接杆第二段7-1-2-2 之间设置有弹簧,所述弹簧在初始状态下,保持压缩状态。初始状态下,径向插接杆第三段 7-1-2-3的端部穿过径向插接槽7-1-1的第二端的开孔,进入到承载轴7的内部;轴向位移调节杆7-1-4的一端铰接在径向插接杆第三段7-1-2-3的一端,具体而言,是铰接在径向插接杆第三段7-1-2-3进入承载轴7内部一侧的端部,轴向位移调节杆7-1-4的另一端与第四轴向推动杆10-4的前部铰接。
在承载轴7的内部设置有供第二轴向推动杆10-2、第四轴向推动杆10-4沿着承载轴轴向方向移动的滑动槽;
移动轴6的前端设置有插压部6-1,插压部6-1突出于移动轴的长度为a,第一轴向推动杆10-1的前端部距离承载轴7的前端部的长度为b;
初始状态下,卡接装置突出与承载轴7表面的距离为c,所述径向插接杆第二段7-1-2-2 朝向承载轴7中心轴向的一面距离径向插接槽7-1-1的距离大于c,轴向位移调节杆7-1-4的轴向方向与承载轴7中心轴向方向的夹角为θ
移动轴6的前端的插压部6-1全部插入到承载轴7中,径向插接杆受到按压向承载轴7 的后端移动,此时的轴向位移调节杆7-1-4的轴向方向与承载轴7中心轴向方向的夹角为θ
因此,有如下理由:
特别的,还有:
有:
设计时,已知c,求取a-b的最小值:a-b≥c。
进行如下研究:
如图18所示,以承载轴7的轴向方向为X轴,以径向插接槽的方向为Y轴;
轴向位移调节杆7-1-4可表达为:x
即有:
从上式可知,x=y,也即θ表示轴向位移调节杆7-1-4的轴向方向与承载轴7中心轴向方向的夹角;
可以知晓,θ在0°~45°,移动轴6的插压部6对于径向插接杆的敏感性大于1。
本申请的设计方法:
已知:c,求a、b、L、θ
首先,确定a、b,b取5~50cm,a取b+c+(0~100)cm;
然后,确定L,L满足:L≥a-b;
再次,确定θ
举例:
已知卡接装置突出与承载轴7表面的距离为c为5cm,设计时,按照如下步骤:
第一,确定a、b,b取5cm,a取15cm;
第二,确定L,L取值20cm;
第三,确定θ
实施例五的工作方法在于:
首先,移动轴6与承载轴7对中、解锁:启动X轴定位单元1、Y轴定位单元2、Z轴定位单元3,调节移动轴6的位置,使得移动轴6与承载轴7对应接触:将移动轴6的插压部 6-1插入到承载轴7的插口中,插压部1与第一轴向推动杆10-1接触,且推动第一轴向推动杆10-1产生大小为a-b的位移;
第一轴向推动杆10-1受压挤压移动时,第二轴向推动杆10-2、第三轴向推动杆10-3、第四轴向推动杆10-4也产生大小为a-b的位移;
此时,第一组卡接装置组件7-1,第二组卡接装置组件7-2的卡接装置的径向插接杆7-1-2 向内移动到径向插接槽7-1-1中;
其次,卷料11从承载轴7移动到移动轴6上:启动卷料推力动力机构8,将卷料从承载轴7推动到移动轴6上。
实施例六:
除了上述改进之外,还进行了如下改进:
在承载轴上不再设置卷料推动机构,原因是:移动轴只有1个,承载轴7的数量为多个,承载轴7上采用传送带等方式实现流水化移动,移动轴6从承载轴7上将盛放有卷料的卷料放置器9移动到移动轴上,移动轴将其能够移动到其他构件上;同时,从其他构件上将卷料放置器9放回到空的承载轴7上。
因此,卷料推力动力机构8设置在移动轴6上,在卷料推力动力机构8的端部设置有吸盘。
实施例六的工作方法在于:
卷料放置器从承载轴7移动到移动轴6是的工作方法为:
首先,移动轴6与承载轴7对中、解锁:启动X轴定位单元1、Y轴定位单元2、Z轴定位单元3,调节移动轴6的位置,使得移动轴6与承载轴7对应接触:将移动轴6的插压部 6-1插入到承载轴7的插口中,插压部1与第一轴向推动杆10-1接触,且推动第一轴向推动杆10-1产生大小为a-b的位移;
第一轴向推动杆10-1受压挤压移动时,第二轴向推动杆10-2、第三轴向推动杆10-3、第四轴向推动杆10-4也产生大小为a-b的位移;
此时,第一组卡接装置组件7-1,第二组卡接装置组件7-2的卡接装置的径向插接杆7-1-2 向内移动到径向插接槽7-1-1中;
其次,卷料放置器从承载轴7移动到移动轴6上:启动卷料推力动力机构8,卷料推力动力机构8伸长直至卷料推力动力机构8的吸盘接触到卷料放置器第一圆盘9-1,启动吸盘,然后卷料推力动力机构8缩短,将卷料从承载轴7拉到移动轴6上。
卷料放置器从承载轴7移动到移动轴6是的工作方法为:
首先,移动轴6与承载轴7对中、卡接装置向内移动:启动X轴定位单元1、Y轴定位单元2、Z轴定位单元3,调节移动轴6的位置,使得移动轴6与承载轴7对应接触:将移动轴6的插压部6-1插入到承载轴7的插口中,插压部1与第一轴向推动杆10-1接触,且推动第一轴向推动杆10-1产生大小为a-b的位移;第一轴向推动杆10-1受压挤压移动时,第二轴向推动杆10-2、第三轴向推动杆10-3、第四轴向推动杆10-4也产生大小为a-b的位移;此时,第一组卡接装置组件7-1,第二组卡接装置组件7-2的卡接装置的径向插接杆7-1-2向内移动到径向插接槽7-1-1中;
其次,卷料放置器从移动轴6移动到承载轴7上:启动卷料推力动力机构8,卷料推力动力机构8伸长直至卷料放置器到达预设位置,然后卷料推力动力机构8缩短至初始状态(此阶段吸盘不需要产生吸力)。
再次,移动轴6与承载轴7分离、加锁:启动X轴定位单元1,使移动轴6的插压部6-1从承载轴7的插口中抽出,插压部1与第一轴向推动杆10-1不再接触,第一组卡接装置组件7-1,第二组卡接装置组件7-2的卡接装置在径向受压弹簧7-1-3的作用下,径向受压弹簧7-1-3 推动径向插接杆7-1-2向外移动,第一组卡接装置组件7-1,第二组卡接装置组件7-2的卡接装置分别插入到第一圆筒9-3、第三圆筒9-5的插孔中。
需要说明的是:本申请实施例四至六中:移动轴与承载轴的设计,也适用于AVG搬运机器人。
以上所举实施例为本申请的较佳实施方式,仅用来方便说明本申请,并非对本申请作任何形式上的限制,任何所属技术领域中具有通常知识者,若在不脱离本申请所提技术特征的范围内,利用本申请所揭示技术内容所作出局部更动或修饰的等效实施例,并且未脱离本申请的技术特征内容,均仍属于本申请技术特征的范围内。
- AVG搬运机器人的设计方法、AVG搬运机器人
- AGV搬运机器人的设计方法、AGV搬运机器人