一种液晶模组缺陷深度测量与分层装置和方法
文献发布时间:2023-06-19 09:29:07
技术领域
本发明涉及AOI(Automatic Optical Inspection)自动光学检测技术领域,具体涉及一种液晶模组缺陷深度测量与分层装置和方法。
背景技术
LCD(Liquid Crystal Display)液晶屏以其价格低廉、显示质量高、纤薄轻巧、零辐射及低能耗等特点,被广泛用于人们日常生产生活,是人机交互的重要界面之一。液晶显示面板的制造包含了许多复杂的生产工艺及测试流程,液晶面板生产和检测技术正朝着自动化智能化的方向快速发展。
液晶面板生产的主要制程分为3段:前段Array制程、中段Cell制程和后段ModuleAssembly制程。其中,后段制程的一般工艺流程主要包括:面板切割、贴偏光片、全贴合、组装背光。在后段工艺流程中,TP盖板、上/下偏光片、液晶盒、背光等原材料会引入各种缺陷,同时制作过程中也会造成位于不同层的缺陷。为此,后段制程的质量检测设置了面板切割后、贴偏光片后和组装背光后的点灯检查和外观检查。
目前现有AOI技术可以实现对液晶面板生产中多个工艺段的自动质量检测。然而,现有AOI技术无法实现对缺陷所处液晶屏中的深度的精确测量,无法对不同层的缺陷进行区分,进而导致无法准确估计LCD屏幕缺陷在各个工艺流程的产生分布情况。对于提高LCD屏幕生产的质量管理水平,AOI检测过程中对LCD屏幕缺陷的深度进行精确测量和分层具有重要意义。
如图1所示,液晶显示模组的组成结构按照从上至下依次为:盖板1、上偏光片2、液晶盒3、下偏光片4和背光5。液晶显示模组相邻两层之间以及各层内部都可能出现缺陷,在盖板1表面也会附着一些灰尘,这些在AOI检测过程中都会被成像系统捕捉到。为了区分缺陷和表面灰尘,现有AOI技术采用关闭屏幕加打光的方式突显灰尘并拍摄打光画面,利用打光画面对检测结果进行过滤。但是部分出现在盖板层的缺陷和表面灰尘在成像系统拍摄的打光画面和其它画面没有区分性特征,这会导致这类盖板层缺陷被漏检。此外,现有AOI技术也无法实现对缺陷所处深度的精确测量和分层。
发明内容
本发明的目的是改进现有AOI技术的不足之处,提供一种液晶模组缺陷深度测量与分层装置和方法,以解决当前AOI检测设备无法区分液晶模组各层缺陷的问题以及近表面缺陷的漏检问题。
为实现上述目的,本发明提供如下技术方案:一种液晶模组缺陷深度测量与分层装置,包括检测设备,其特征在于:所述检测设备包含设备机架和设置在设备机架上的液晶模组卡位、视角A相机和视角B相机,视角A相机和视角B相机的拍摄方向分别朝向液晶模组卡位。
优选地,所述视角A相机和/或视角B相机的相机视角垂直朝向液晶模组卡位上卡设的液晶模组显示表面时,视角A相机和/或视角B相机选用面阵相机或线阵相机;所述视角A相机和/或视角B相机的相机视角以一定俯角斜对液晶模组卡位上卡设的液晶模组显示表面时,视角A相机和/或视角B相机选用面阵相机。
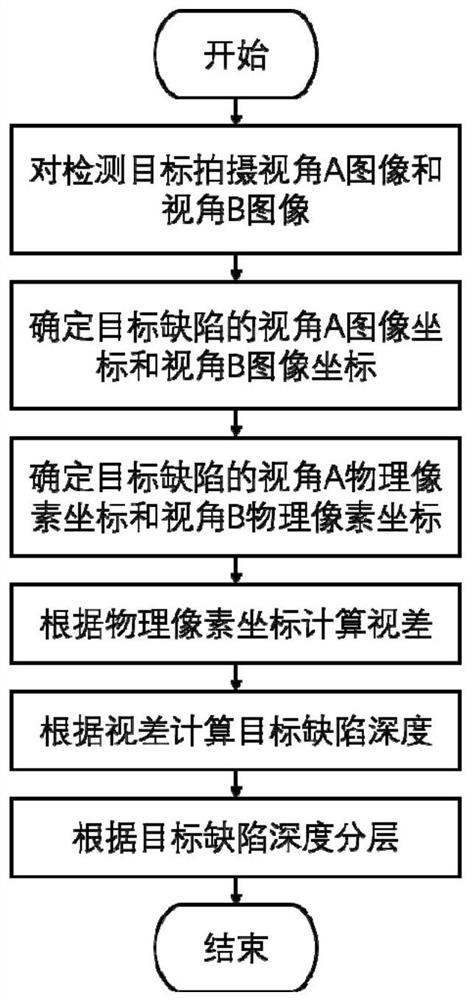
一种液晶模组缺陷深度测量与分层方法,包括以下步骤:
步骤1,将待检测液晶模组放置于检测设备的液晶模组卡位上,利用视角A相机和视角B相机对液晶模组拍摄视角A图像I
步骤2,分别在视角A图像和视角B图像中定位目标缺陷在图像中位置,得到目标缺陷的视角A图像像素坐标P
步骤3,以液晶盒像素阵列作为坐标锚点建立物理像素坐标系,将目标缺陷的视角A图像像素坐标P
步骤4,根据目标缺陷视角A物理像素坐标Q
步骤5,根据预先标定得到的视差至深度映射参数k,通过目标缺陷视差值δ计算得到目标缺陷相对于液晶层彩色滤光片的深度d。
步骤6,根据目标缺陷深度值d确定该缺陷位于液晶模组哪一层l
优选地,所述在视角A图像和视角B图像中定位目标缺陷在图像中位置得到目标缺陷的视角A图像像素坐标P
优选地,所述根据目标缺陷视角A物理像素坐标Q
优选地,所述以液晶盒像素阵列作为坐标锚点建立物理像素坐标系,结合锚点定位和局部相对定位确定缺陷位置的物理像素坐标。
优选地,所述利用液晶模组缺陷相对于液晶盒彩色滤光片的深度与其物理像素坐标系下的视差之间的正比关系进行深度估计和分层。
优选地,所述确定视差至深度映射参数k|的标定方法为:在液晶模组表面附上标记点并拍摄视角A图像和视角B图像;按照前述步骤,根据视角A图像和视角B图像计算标记点的视差δ
优选地,所述步骤六根据目标缺陷深度值确定该缺陷位于液晶模组哪一层的方法为:根据液晶模组设计结构及规格确定液晶模组中各层的相对于液晶盒中彩色滤光片的深度区间以及表面灰尘相对于液晶盒中彩色滤光片的深度区间;检查目标缺陷深度值所属深度区间,其对应的层/表面即为缺陷所在。
优选地,所述缺陷位置图像像素坐标P
与现有技术相比,本发明的有益效果是:本发明是一种液晶模组缺陷深度测量与分层装置和方法,可以实现液晶面板AOI检测的缺陷的深度测量和分层,解决了近表面缺陷与表面灰尘无法区分的问题。根据分层结果对液晶面板不同层缺陷出现的频率进行统计分析,可以估计各个液晶模组生产工艺流程引入的缺陷情况,进而帮助发现存在问题的工艺流程并进行针对性的改进,提高生产质量管理水平。
本发明是一种液晶模组缺陷深度测量与分层装置和方法,适用于各种尺寸的液晶面板,同时也适用于OLED面板。
本发明的液晶模组缺陷深度测量与分层装置包含两个及以上不同视角相机及运输机构等主要部件。其中侧视相机为高分辨率线阵相机,相比于面阵相机克服了侧视条件下景深不足导致的图像部分区域失焦模糊问题,实现了清晰拍摄液晶模组的像素矩阵的效果。本发明的液晶模组缺陷深度测量与分层装置中不同视角相机可以集中部署,也可以分散到不同工位部署,部署实施方便灵活,甚至可以实现与其它设备共享复用相机的效果。
本发明的液晶模组缺陷深度测量和分层方法以液晶盒像素阵列作为坐标锚点建立物理像素坐标系,结合锚点定位和局部相对定位实现了缺陷位置的物理像素坐标的精准定位,在相机抖动、相机成像存在畸变、运输机构速度不稳定等条件下都能准确定位,具有很好的稳定性和可靠性。
本发明的液晶模组缺陷深度测量和分层方法在物理像素坐标系下计算目标缺陷的视差,与一般基于双目视觉的方法相比,无需成像系统进行双目/多目视觉标定,无需对图像进行配准矫正。
本发明的液晶模组缺陷深度测量和分层方法利用液晶模组缺陷相对于液晶盒彩色滤光片的深度与其物理像素坐标系下的视差之间的正比关系进行深度估计和分层,与一般基于双目视觉的方法相比,深度与视差之间的关系更简单,不同深度处的深度估计精度是均一的,并且不受相机之间基线长度的影响,对相机位姿的要求更宽松。
附图说明
图1为现有技术中液晶显示模组的结构示意图。
图2为图像像素坐标与物理像素坐标转换示意图。
图3液晶模组缺陷相对于液晶盒彩色滤光片的深度与其相应视差成正时的结构示意图。
图4为本发明检测步骤示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅说明书附图,本发明提供一种技术方案:一种液晶模组缺陷深度测量与分层装置,包括检测设备,检测设备包含设备机架和设置在设备机架上的液晶模组卡位、视角A相机、视角B相机和运输机构,所述运输机构数量为两个,视角A相机和视角B相机的拍摄方向分别朝向液晶模组卡位,视角A相机和视角B相机分别通过一个运输机构可改变拍摄角度的设置在检测设备上。
优选地,所述视角A相机和/或视角B相机的相机视角垂直朝向液晶模组卡位上卡设的液晶模组显示表面时,视角A相机和/或视角B相机选用面阵相机或线阵相机;所述视角A相机和/或视角B相机的相机视角以一定俯角斜对液晶模组卡位上卡设的液晶模组显示表面时,视角A相机和/或视角B相机选用面阵相机。
一种液晶模组缺陷深度测量与分层方法,包括以下步骤:
步骤1,将待检测液晶模组放置于检测设备的液晶模组卡位上,利用视角A相机和视角B相机对液晶模组拍摄视角A图像I
步骤2,分别在视角A图像和视角B图像中定位目标缺陷在图像中位置,得到目标缺陷的视角A图像像素坐标P
步骤3,以液晶盒像素阵列作为坐标锚点建立物理像素坐标系,将目标缺陷的视角A图像像素坐标P
步骤4,根据目标缺陷视角A物理像素坐标Q
步骤5,根据预先标定得到的视差至深度映射参数k,通过目标缺陷视差值δ计算得到目标缺陷相对于液晶层彩色滤光片的深度d。
步骤6,根据目标缺陷深度值d确定该缺陷位于液晶模组哪一层l
优选地,所述在视角A图像和视角B图像中定位目标缺陷在图像中位置得到目标缺陷的视角A图像像素坐标P
优选地,所述根据目标缺陷视角A物理像素坐标Q
优选地,所述以液晶盒像素阵列作为坐标锚点建立物理像素坐标系,结合锚点定位和局部相对定位确定缺陷位置的物理像素坐标。
优选地,所述利用液晶模组缺陷相对于液晶盒彩色滤光片的深度与其物理像素坐标系下的视差之间的正比关系进行深度估计和分层。
优选地,所述确定视差至深度映射参数k|的标定方法为:在液晶模组表面附上标记点并拍摄视角A图像和视角B图像;按照前述步骤,根据视角A图像和视角B图像计算标记点的视差δ
优选地,所述步骤六根据目标缺陷深度值确定该缺陷位于液晶模组哪一层的方法为:根据液晶模组设计结构及规格确定液晶模组中各层的相对于液晶盒中彩色滤光片的深度区间以及表面灰尘相对于液晶盒中彩色滤光片的深度区间;检查目标缺陷深度值所属深度区间,其对应的层/表面即为缺陷所在。
优选地,所述缺陷位置图像像素坐标P
本发明两个及以上不同视角相机及运输机构可以为X轴直线运动机构、Y轴直线运动机构、Z轴直线运动机构和角度旋转机构,以便于视角A相机和视角B相机通过X轴直线运动机构、Y轴直线运动机构、Z轴直线运动机构和角度旋转机构改变拍摄的位置和角度。
若相机拍摄液晶模组的视角比较小(大约<5°),相机类型线阵相机、面阵相机均可,从而实现清晰拍摄液晶模组的像素矩阵。若相机拍摄液晶模组的视角比较大(大约>15°),相机类型须为线阵相机,结合运输机构对液晶模组进行扫描成像,从而实现清晰拍摄液晶模组的像素矩阵。
在本实施例中,各个视角相机对液晶模组拍摄图像时,保持图像视野中液晶模组显示区长边与图像水平方向平行。
液晶盒像素阵列(简称:像素阵列)作为坐标锚点建立物理像素坐标系;根据缺陷位置找到临近的像素作为锚点像素,确定锚点像素图像像素坐标P
本发明可根据公式
本设计要说明的是:本设计中,涉及的控制电路,以来控制各组件动作以及相应的控制程序都是现有技术。在本发明的描述中,需要理解的是,术语“同轴”、“底部”、“一端”、“顶部”、“中部”、“另一端”、“上”、“一侧”、“顶部”、“内”、“前部”、“中央”、“两端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明中,除非另有明确的规定和限定,术语“安装”、“设置”、“连接”、“固定”、“旋接”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种液晶模组缺陷深度测量与分层装置和方法
- 一种液晶模组缺陷检测后的复判分层方法