运动体跟踪装置和放射线治疗系统以及运动体的跟踪方法
文献发布时间:2023-06-19 09:29:07
技术领域
本发明涉及实时地识别被检测体内的标靶的位置的运动体跟踪装置、使用它照射治疗用放射线的放射线治疗系统、以及运动体的跟踪方法。
背景技术
在专利文献1中,记载了以下内容:使用预先准备的表示标记的模板图像,在2个透视图像上实施模板匹配,将匹配评分高的位置作为标记位置的候选并进行列表化。根据标记位置的2个候选列表,针对全部组合计算共通垂线的长度。在此基础上,根据匹配评分和共通垂线,检测标记的位置。然后根据检测出的标记的位置,控制向标靶照射的质子束的出射。
另外,在专利文献2中,记载了以下内容:实施方式的医用图像处理装置具备计算部和检测部。计算部针对透视被检测体的内部所得的透视图像,对每个关注像素,设定包含关注像素的周边的2个以上的第一像素的第一区域、包含与2个以上的第一像素不同的1个以上的第二像素的第二区域,计算出似然度,其中,2个以上的第一像素的像素值越相互接近、并且2个以上的第一像素的像素值与1个以上的第二像素的像素值越远离,则该似然度的值越大。检测部根据关注像素各自的似然度,检测被检测体的内部的对象的位置。
另外,在专利文献3中,记载了以下内容:运动体跟踪控制装置对拍摄图像A、拍摄图像B实施灰度处理,使用实施该灰度处理后的拍摄图像A、拍摄图像B,测量标记的位置,根据该标记的位置,生成控制放射线的照射的信号。
现有技术文献
专利文献
专利文献1:日本特开2017-209243号公报
专利文献2:日本特开2017-124300号公报
专利文献3:日本特开2017-196036号公报
发明内容
发明要解决的问题
在高精度放射线治疗中,要求与因呼吸、心跳等体内的活动造成的患处的位置、形状的变动对应地,控制治疗用放射线照射装置。作为高精度地照射治疗用放射线的方法,存在运动体跟踪放射线治疗。
在运动体跟踪放射线治疗中,根据使用X射线等拍摄到的患者体内的透视图像,测量留置在患处、患者体内的标记等标靶的位置。以下,为了区别治疗用的放射线和用于测定标靶的位置的放射线,将治疗用的放射线称为“治疗用放射线”,将测定用的放射线称为“透视用放射线”。
在透视用放射线的强度弱的情况下,透视图像所包含的噪声增加,产生检测标靶以外的部分的错误识别。为了防止错误识别,还必须具有某种程度的强度地照射透视用放射线,存在透视用放射线照射装置的使用负荷增大的问题。
在此,作为防止因噪声造成的错误识别的技术,有上述的专利文献1~3记载的技术。
在专利文献1中,能够防止因噪声造成的错误识别,因此期待减轻透视用放射线检测器的使用负荷。
另外,在专利文献2中,即使减弱透视用放射线的强度,也能够检测出标靶,期待减轻透视用放射线检测器的使用负荷。
另外,在专利文献3中,即使在标记的附近存在近似标记的构造的情况下,也能够不丢失地持续跟踪标记,能够省去用于在丢失了标记的情况下操作者使运动跟踪装置再次检测标记的麻烦。
但是,通过本发明人的研究,首先发现了在上述专利文献1~3记载的现有技术中存在以下改进的余地。
即,在上述专利文献1记载的技术中,发现在噪声极多的情况下,无法通过模板匹配来使标靶位置的候选列表化。因此,可知存在以下的问题,即,需要将透视用放射线的强度较强地保持为通过模板匹配将标靶位置作为候选并进行列表化的程度。
另外,已知在上述专利文献2记载的技术中,在噪声极多的情况下,标靶的投影像相对于本来的形状有很大失真,与标记位置的似然度降低。因此,已知将错误识别与噪声意外地产生的标靶相同形状的像,而为了防止它,需要将透视用放射线的强度较强地保持为标靶的投影像相对于本来的形状不失真的程度。
另外,对于上述专利文献3记载的技术,也已知在噪声极多的情况下,即使进行灰度处理有时也无法测量标记的位置。因此,已知需要将透视用放射线的强度较强地保持为能够通过灰度处理测量标记的位置的程度。
本发明鉴于上述那样的通过本发明人的研究首先发现的问题而完成的,其目的在于,提供即使在透视用放射线的透视条件严格而噪声极多的情况下,也能够准确地检测出跟踪对象,并且减轻透视用放射线检测器的负荷的运动体跟踪装置和放射线治疗系统、以及运动体的跟踪方法。
解决问题的方案
本发明包含解决上述问题的多个办法,但如果列举其一个例子,则是一种放射线治疗系统,其特征在于,具备:照射装置,其产生并照射放射线;2组以上的透视装置,其将透视用放射线检测器和透视用放射线产生装置作为一组,拍摄跟踪对象的透视图像;中央控制部,其控制上述照射装置;运动体跟踪控制部,其从由上述透视装置拍摄到的上述透视图像中检测上述跟踪对象的位置,由此跟踪运动体的位置,就上述运动体跟踪控制部而言,强调由上述2组以上的透视装置分别得到的透视图像中的特定大小的像,求出表示在进行了上述强调的处理的图像中检测上述跟踪对象的位置的候选的准确性的值,根据上述表示检测的准确性的值提取上述候选,计算表示在从上述2个以上的方向拍摄到的各个图像中提取的上述候选的位置与上述透视用放射线产生装置的位置之间的关联的值,根据表示上述检测的准确性的值和表示上述关联的值来检测上述跟踪对象的位置,根据检测出的上述跟踪对象的位置,控制向标靶照射的放射线。
发明效果
根据本发明,即使在透视用放射线的透视条件严格而噪声极多的情况下,也能够准确地检测出跟踪对象,并且减轻透视用放射线检测器的负荷。根据以下的实施方式的说明,能够了解上述以外的问题、结构、以及效果。
附图说明
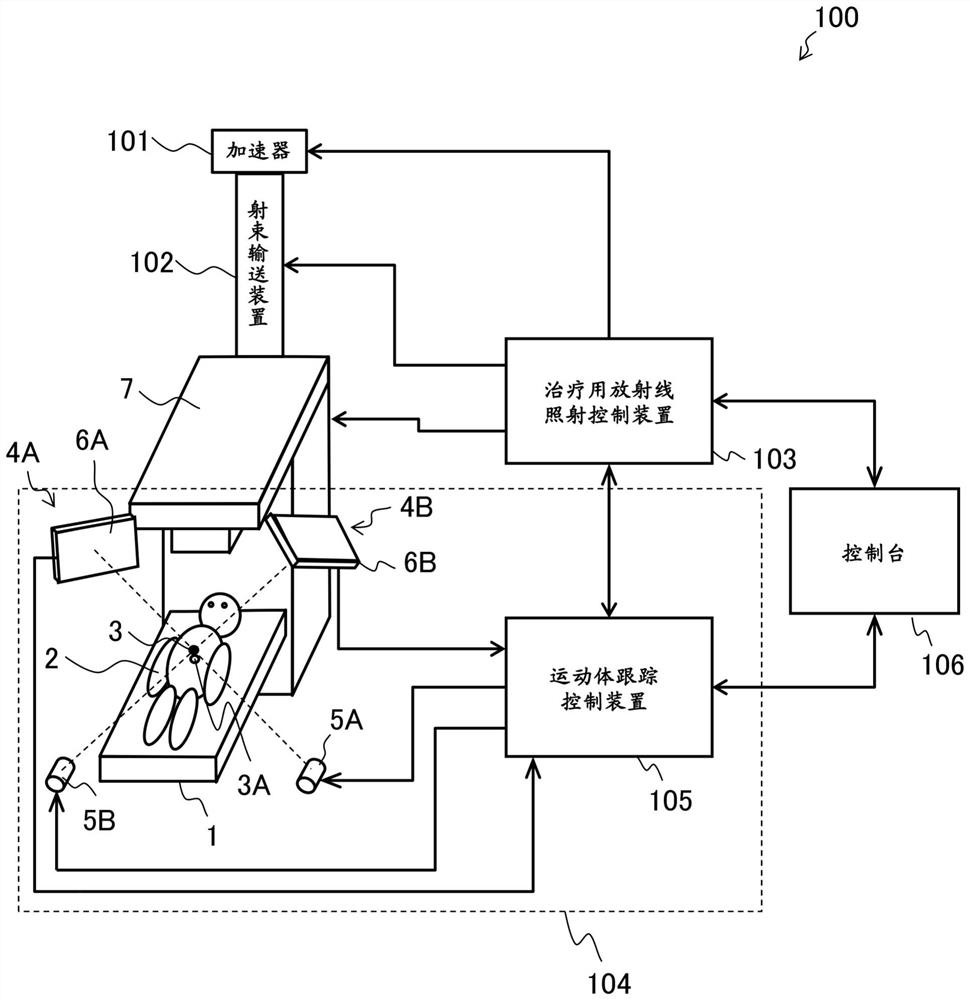
图1是本发明的实施方式的放射线治疗系统的整体结构图。
图2是本实施方式的运动体跟踪装置取得透视图像的概念图。
图3是本实施方式的运动体跟踪装置根据透视图像计算标靶的位置的概要图。
图4是表示错误地检测出透视图像中的噪声的情况的概要图。
图5A是表示本实施方式的运动体跟踪装置应用强调处理之前的透视图像的一个例子的图。
图5B是表示本实施方式的运动体跟踪装置应用强调处理之后的透视图像的一个例子的图。
图6A是表示本实施方式的将应用强调处理之前的透视图像显示于控制台时的状况的一个例子的图。
图6B是表示本实施方式的将应用强调处理之后的透视图像显示于控制台的状况的一个例子的图。
图7A是表示本实施方式的应用强调处理之前的评价函数的运算结果的一个例子的图。
图7B是表示本实施方式的应用强调处理之后的评价函数的运算结果的一个例子的图。
图8A是表示本实施方式的控制台的画面的一个例子的概念图。
图8B是表示本实施方式的控制台的画面的另一个例子的概念图。
图9是表示本实施方式的运动体跟踪治疗的处理流程的图。
图10是本实施方式的其他例子的运动体跟踪装置根据透视图像计算标记的位置的概念图。
附图标记说明
1:治疗台;2:被检测体;3:标靶;3A:照射对象;4A、4B:透视用放射线拍摄装置(透视装置);5A、5B:透视用放射线产生装置;6A、6B:透视用放射线检测器;7:治疗用放射线照射装置(照射装置);31:等中心点;31A、13B:线;32:共通垂线;41A、41B:标靶的投影像;42:噪声产生的像;43A、43B:线;44:共通垂线;51、61A、62A:应用强调处理前的透视图像;52、61B、62B:应用强调处理后的透视图像;63A、63B、64A、64B:搜索范围;81A、81B:显示于控制台上的透视图像;82:透视开始按键;83:设定按键;84:强调按键;85:w
具体实施方式
使用图1~图10说明本发明的运动体跟踪装置和放射线治疗系统、以及运动体的跟踪方法。
首先,使用图1说明放射线治疗系统100的整体结构。图1是表示本实施方式的放射线治疗系统的整体概要结构的图。
在图1中,放射线治疗系统100是用于向被检测体2内的患处(以下记载为照射对象3A)照射由碳等重粒子、质子构成的粒子线的装置。
该放射线治疗系统100具备加速器101、射束输送装置102、能够定位被检测体2的治疗台1、向被检测体2内的照射对象3A照射从加速器101供给的治疗用粒子线的治疗用放射线照射装置7、治疗用放射线照射控制装置103、运动体跟踪装置104、控制台106等。
以下,将被检测体2内的作为跟踪对象的标靶3作为插入到被检测体2内的照射对象3A近旁的标记来进行说明。
治疗用粒子线在通过与治疗室不同的房间所具备的加速器101加速到所需要的能量后,通过射束输送装置102引导到治疗用放射线照射装置7。加速器101可以设为同步加速器、回旋加速器、其他各种加速器。
治疗用放射线照射装置7具备2对扫描电磁铁、射线量监视器、位置监视器(均省略图示)。2对扫描电磁铁被设置在相互垂直的方向上,能够使粒子线偏向,使得粒子线到达在标靶的位置处与射束轴垂直的面内的希望的位置。射线量监视器测量所照射的粒子线的量。位置监视器能够检测粒子线通过的位置。通过了治疗用放射线照射装置7的粒子线到达照射对象3A。
粒子线的照射方法并没有具体限定,除了排列细粒子线形成的射线量分布而形成与照射对象3A的形状一致的射线量分布的点扫描法以外,还可以使用不停止粒子线而照射细粒子线的光栅扫描法、行扫描法。
另外,除了上述那样的扫描法以外,还能够将本发明应用于摆动法、双重散射法等使粒子线的分布变宽后使用准直仪、推注器而形成与标靶的形状一致的射线量分布的照射方法。
此外,在代替碳射线、质子线等粒子线而使用X射线作为治疗用放射线的情况下,设置产生治疗用X射线的治疗用X射线照射装置,来代替加速器101、射束输送装置102。在使用γ射线的情况下,设置产生治疗用γ射线的γ射线照射装置,来代替加速器101、射束输送装置102。在使用电子线的情况下,设置产生治疗用电子线的电子线照射装置,来代替加速器101、射束输送装置102。
运动体跟踪装置104具备透视用放射线拍摄装置4A、4B、运动体跟踪控制装置105。
透视用放射线拍摄装置4A具备从第一方向朝向被检测体2内的标靶3产生透视用放射线的透视用放射线产生装置5A、检测从透视用放射线产生装置5A产生并透过了被检测体2的透视用放射线的二维射线量分布的透视用放射线检测器6A、信号处理电路(省略图示)。
透视用放射线检测器6A从二维配置的检测元件输出模拟信号。信号处理电路对来自透视用放射线检测器6A的模拟信号进行处理,生成透视图像的数据,并向运动体跟踪控制装置105发送。
同样地,透视用放射线拍摄装置4B具备从与第一方向不同的第二方向朝向被检测体2产生透视用放射线的透视用放射线产生装置5B、检测从透视用放射线产生装置5B产生并透过了被检测体2的透视用放射线的二维射线量分布的透视用放射线检测器6B、信号处理电路(省略图示)。
透视用放射线检测器6B从二维配置的检测元件输出模拟信号。信号处理电路对来自透视用放射线检测器6B的模拟信号进行处理,生成透视图像的数据,并向运动体跟踪控制装置105发送。
此外,在本实施方式中,将透视用放射线检测器的台数设为2台,但并不限于此,只要是2台以上,可以是任意台。
运动体跟踪控制装置105根据从透视用放射线拍摄装置4A、4B输入的透视图像的信号,计算标靶3的位置,在此基础上,根据标靶3的位置,判定是否允许治疗用粒子线的出射,向治疗用放射线照射控制装置103发送能否照射治疗用粒子线的信号。
更具体地说,运动体跟踪控制装置105如图2所示那样,向标靶3照射从透视用放射线产生装置5A产生的放射线,通过透视用放射线检测器6A测定通过了标靶3的放射线的二维射线量分布,由此拍摄标靶3。与此同时,向标靶3照射从透视用放射线产生装置5B产生的放射线,通过透视用放射线检测器6B测定通过了标靶3的放射线的二维射线量分布,由此拍摄标靶3。
运动体跟踪控制装置105根据所取得的2个透视图像,计算标靶3的三维位置,并根据其结果判定是否允许治疗用粒子线的出射。
例如,运动体跟踪控制装置105判定标靶3的位置是否进入了预先指定的选通范围,在判定为标靶的位置进入了选通范围的情况下,向治疗用放射线照射控制装置103发送选通开信号,允许粒子线向照射对象3A的出射。与此相对,在判定为标靶3的位置没有进入选通范围的情况下,发送选通关信号,不允许出射。
因此,本实施方式的运动体跟踪控制装置105执行检测标靶3的处理。将在后面说明其详细内容。
例如按照30Hz的固定间隔,实施透视用放射线拍摄装置4A、4B对透视图像的取得。在取得的透视图像中显示出标靶3,通过后述的方法确定透视图像中的标靶3的位置。
如果搜索透视图像的全部范围,则搜索需要时间,因此也可以将上一个透视图像中的标靶3的位置作为中心,只在预先确定的大小的范围内,搜索标靶3的位置。
在图3中示出将检测出的标靶3在透视用放射线检测器6A上的位置和透视用放射线产生装置5A连接起来的线31A、以及将标靶3在透视用放射线检测器6B上的位置和透视用放射线产生装置5B连接起来的线31B。理想的是这2条线在一点上相交,该交点是标靶3所存在的位置。
但是,实际上由于检测的误差、透视用放射线检测器的设置误差等的影响,2条线通常不相交,处于捻合的关系。能够在处于该捻合的关系的2条线最接近的位置处引出共通的垂线。将该共通的垂线称为共通垂线32。另外,将该共通垂线32的中点作为标靶3的三维位置。
返回到图1,治疗用放射线照射控制装置103与加速器101、射束输送装置102、治疗用放射线照射装置7等连接,控制构成这些各装置的各设备的动作。
通过使具备CPU、存储器、接口等的计算机、FPGA(现场可编程门阵列)读入程序并执行计算,由此可以实现该治疗用放射线照射控制装置103、上述运动体跟踪控制装置105。将这些程序存储在各结构内的内部记录介质、外部记录介质(省略图示)中,由CPU读入并执行。
此外,治疗用放射线照射控制装置103、运动体跟踪控制装置105的动作的控制处理既可以汇总到一个程序中,也可以分别分开到多个程序中,还可以是它们的组合。另外,对于程序的一部分或全部,既可以用专用硬件来实现,也可以模块化。进而,也可以将各种程序从程序发布服务器、内部存储介质、外部记录介质安装到各装置。
另外,治疗用放射线照射控制装置103、运动体跟踪控制装置105不必须是独立的,也可以对2个以上进行一体化、共通化,只对处理进行分担。另外,也可以经由有线或无线的网络将至少一部分结构连接起来。
本实施方式的最大特征在于通过运动体跟踪控制装置105检测标靶3的处理的方法。以下,使用图4以后的图说明该方法。
在一般的处理方法中,根据通过透视用放射线拍摄装置4A、4B分别取得的透视图像检测出一个以上的标靶3的位置的候选,求出表示检测出该候选的准确性的值。另外,求出通过透视用放射线检测器6A、6B分别检测出的标靶3的候选位置的关联的值。然后,根据该表示检测的准确性的值和表示关联的值,检测出标靶3的三维位置。
作为表示检测出的准确性的值的一个例子,使用基于模板匹配的匹配评分。在模板匹配中,对预先准备的标靶3的模板图像和透视图像进行比较,计算被称为匹配评分的与模板图像的类似度。对匹配评分使用标准化相互相关等的类似度。
该匹配评分越高,则表示正在搜索的透视图像与模板图像越是一致。因此,提取匹配评分比预先指定的阈值高的位置作为标靶的位置的候选。
另外,作为表示关联的值的一个例子,针对将由透视用放射线拍摄装置4A得到的透视图像中的标靶3的候选位置所对应的透视用放射线检测器6A上的位置和透视用放射线产生装置5A连接起来的线、以及将由透视用放射线拍摄装置4B得到的透视图像中的标靶3的候选位置所对应的透视用放射线检测器6B上的位置和透视用放射线产生装置5B连接起来的线,使用将这2条线之间以最短的方式连接起来的共通垂线(图3所示的共通垂线32)的长度。
在此,在上述方法中,在没有提取投影到透视用放射线检测器6A、6B上的标靶3的位置作为标靶3的候选的情况下,会错误识别具有与标靶3类似的构造的像(噪声意外地产生的像)。因此,通过本发明人的研究,首先发现了需要将透视用放射线的强度保持为某种程度。
以下,使用图4说明在一般的方法中需要将透视用放射线的强度保持为某种程度的理由。
在图4中,示出以下的情况:由于透视用放射线的强度弱等理由,将标靶3投影到透视用放射线拍摄装置4A所得的像41A被噪声所掩盖,并且在投影标靶3所得的像41A的附近存在具有与标靶3类似的构造的像42。另一方面,将标靶3投影到透视用放射线拍摄装置4B所得的像41B被明确地显示出来。
在图4所示那样的情况下,通过模板匹配,标靶3投影到透视用放射线拍摄装置4A所得的像41A没有作为标靶3的候选位置被检测到。另外,只有具备与标靶3类似的构造的像42作为标靶3的候选位置被检测出。
在该情况下,将像42与透视用放射线产生装置5A连接起来的线43A和将像41B与透视用放射线产生装置5B连接起来的线43B之间的共通垂线44的长度取大的值,但除此以外没有标靶3的候选位置,因此会将像42错误识别为标靶3的投影像。
可知为了防止该问题,需要将透视用放射线的强度较强地保持为投影标靶3所得的像41A不被噪声掩盖的程度。
对此,基于本发明人的研究,在本实施方式中,为了进一步降低透视用放射线的强度,进一步减轻透视用放射线产生装置的使用负荷,在应用对由2组以上的透视用放射线拍摄装置4A、4B分别得到的透视图像中的特定大小的像进行强调的标靶强调处理的基础上,计算标靶的候选位置,使用表示检测的准确性的值和共通垂线的长度来检测标靶的位置。
作为本实施方式的标靶强调处理的一个例子,具有从透视图像中提取基于标靶3的大小的特定的频率分量的处理。
更具体地说,使用带通滤波器、低通滤波器、高通滤波器中的任意一个以上。这时,根据标靶3的大小确定滤波器的参数。
例如,在标靶3是球形的直径2mm的标记的情况下,标靶3的投影像在透视图像中被显示为10像素左右的大小的像。在该情况下,例如设定带通滤波器的参数以便强调从5像素到15像素之间的像。
另外,对于本实施方式的标靶强调处理,除了从透视图像中提取上述特定的频率分量的处理以外,例如还有对基于标靶3的大小的特定的区域进行平滑化的处理。
更具体地说,对平滑滤波器、中值滤波器、高斯滤波器中的任意一个以上进行使用。这时,根据标靶3的大小确定滤波器的参数。
例如,在标靶3是球形的直径2mm的标记的情况下,标靶3的投影像在透视图像中被显示为10像素左右的大小的像。在该情况下,例如将平滑滤波器的滤波大小设为3像素×3像素左右,由此能够强调标靶的投影像。
另外,标靶强调处理通过组合上述的各种滤波器,能够得到更好的效果。
具体地说,在标靶3是球形的直径2mm的标记的情况下,标靶的投影像在透视图像中被显示为10像素左右的大小的像。在该情况下,生成将平滑滤波器的滤波大小设为15像素×15像素来进行应用的第一平滑化图像和将平滑滤波器的滤波大小设为3像素×3像素来进行应用的第二平滑化图像。然后,通过取得这些第一平滑化图像、第二平滑化图像的差分,由此能够实现对特定的频率分量进行强调的处理。
在图5A中示出应用标靶强调处理之前的透视图像51的一个例子,在图5B中示出应用标靶强调处理之后的透视图像52的一个例子。此处的标靶3是直径2mm的球状的金色标记,作为标靶强调处理,应用带通滤波器。在图5A和图5B中,用白色箭头表示投影标靶3所得的像,用黑框表示通过模板匹配提取的标靶3的候选位置。
如图5A所示,在应用标靶强调处理之前的透视图像51中,由于投影标靶3所得的像相对于本来应该显示出的圆形的像有很大失真,因此没有被提取作为标靶3的候选位置。
与此相对,如图5B所示,在应用了强调处理之后的透视图像52中,投影标靶3所得的像与本来的圆形的像类似。因此,匹配评分上升,被提取为候选位置。通过这样应用标靶强调处理,能够降低不将投影标靶3所得的像提取作为候选位置的可能性。
同时,在应用了标靶强调处理的透视图像52中,如图5B所示,提取了具有与标靶3类似的构造的像作为多个候选。但是,这些类似构造的像是与通过另一个透视用放射线检测器得到的标靶3的候选位置的共通垂线的长度大的值。因此,通过如后述那样使用共通垂线,能够与投影标靶3所得的像进行区别。
在通过这些效果降低了透视用放射线的强度的情况下,也能够降低错误检测出与标靶3类似的构造的像的可能性。
以下,使用图6A和图6B具体地说明本实施方式的动作。在图6A中示出通过透视用放射线拍摄装置4A得到的透视图像61A、通过透视用放射线拍摄装置4B得到的透视图像62A。另外,在图6B中示出应用了标靶强调处理后的透视图像61B和透视图像62B。
在各个透视图像内有搜索范围63A、64A、63B、64B。
在图6A所示的透视图像61A中,示出了在搜索范围内被提取作为标靶3的候选位置的点71A、72A。其中,被黑圈填充的点71A为实际的标靶3的投影像。点72A是由噪声意外地显示为与标靶3相同形状的像。
另外,在图6A所示的透视图像62A中,示出了在搜索范围内被提取作为标靶3的候选位置的点73A。另外,标靶3的投影像实际上位于用虚线圈74A所示的位置,但在通过透视用放射线拍摄装置4B得到的强调处理前的透视图像62A中被噪声掩盖,因此没有被提取作为标靶3的候选位置。
在图6B所示的强调处理后的透视图像61B中,示出了在搜索范围内被提取作为标靶3的候选位置的点71B、72B、75B,被黑圈填充的点71B是实际的标靶3的投影像。另外,与图6A所示的透视图像61A相比,新提取了之前没有被提取作为候选的像75B。它们是强调了显示为与标靶3类似的形状的噪声的像。
在图6B所示的透视图像62B中,示出了在搜索范围内被提取作为标靶3的候选位置的点73B、74B、76B,被黑圈填充的点74B是实际的标靶3的投影像。另外,与图6A所示的透视图像62A相比,在应用了强调处理后的透视图像62B中,新提取了之前没有被提取作为候选的像76B。它们是强调了显示为与标靶3类似的形状的噪声的像。
接着,运动体跟踪控制装置105对在各个透视图像中提取的标靶3的候选位置进行列表化。在此,优选在根据各个透视图像生成的列表中,在被选择为标靶3的候选的部分中存在被判断为选择了相同的候选的一群时,将匹配评分最高的候选作为这一群中的标靶3的候选位置来进行处理,并从列表中删除该一群中的其他候选。
例如,在存在更接近标靶3的大小的候选的情况下,保留接近的候选中的评分最高的候选,并从列表中删除其他的候选。可以预先从控制台106上设定成为基准的范围,该基准用于判断为像这样为了删除接近候选而选择了相同候选。
接着,运动体跟踪控制装置105针对列表所列举的候选的全部组合,计算共通垂线的长度。针对一个组合,求出共通垂线的长度、评价函数。
就评价函数F而言,在将针对由透视用放射线拍摄装置4A得到的透视图像的评分设为S
接着,运动体跟踪控制装置105在全部组合中选择评价函数F为最大的组合,将其共通垂线的中点检测为标靶3的位置。
运动体跟踪控制装置105根据检测出的标靶3的位置,控制向照射对象3A照射的粒子线。例如,运动体跟踪控制装置105向治疗用放射线照射控制装置103输出治疗用粒子线照射信号,使得在跟踪对象的位置处于预先指定的范围内时照射粒子线,治疗用放射线照射控制装置103执行粒子线的出射控制。
在图7A中示出根据应用强调处理之前的透视图像61A、62A生成的标靶的候选的组合列表。另外,在图7B中示出根据应用强调处理之后的透视图像61B、62B生成的标靶的候选的组合列表。
在图7A所示的列表中,在透视图像62A中没有提取投影标靶3所得的像作为候选,因此即使选择评价函数F最高的组合,仍会错误检测出作为噪声的73A。
与此相对,在作为进行了本实施方式的强调处理的结果而得到的图7B所示的列表中,检测出评价函数F最高的组合即透视图像61B的点71B和透视图像62B的点74B来作为标靶3,因此可知能够防止错误检测。
返回到图1,控制台106与治疗用放射线照射控制装置103、运动体跟踪控制装置105连接,根据从治疗用放射线照射控制装置103、运动体跟踪控制装置105取得的信号,将信息显示到画面上。另外,控制台106接受来自操作放射线治疗系统的操作者的输入,向治疗用放射线照射控制装置103和运动体跟踪控制装置105发送各种控制信号。
例如,控制台106显示通过透视用放射线拍摄装置4A、4B得到的透视图像、标靶3的跟踪状况。另外,能够从控制台106设定跟踪标靶3所需要的参数。
在图8A中示出显示于控制台106的与运动体跟踪控制装置105有关的运动体跟踪用的画面。如图8A所示,在显示于控制台106的画面上,显示从透视用放射线拍摄装置4A得到的透视图像81A、以及从透视用放射线拍摄装置4B得到的透视图像81B。另外,在画面下部,显示有透视开始按键82、设定按键83、强调按键84。通过按下图8A所示的强调按键84,能够对强调处理的开、关进行切换。
如果按下图8A所示的设定按键83,则显示图8B的画面。在图8B的画面中,有成为上述评价函数的加权的w
接着,使用图9说明使用本实施方式的放射线治疗系统来照射治疗用粒子线的流程。
首先,将被检测体2固定到治疗台1上,使治疗台1移动,而将被检测体2移动到预先计划的位置。这时,通过使用透视用放射线检测器6A、6B拍摄透视图像,而确认被检测体2移动到了预先计划的位置。
运动体跟踪控制装置105如果识别出由操作者按下了控制台106上的透视开始按键82(步骤S900),则开始透视用放射线的照射,通过透视用放射线拍摄装置4A取得透视图像A,通过透视用放射线拍摄装置4B取得透视图像B(步骤S901A、步骤S901B)。
接着,运动体跟踪控制装置105对所取得的透视图像A和透视图像B应用强调处理(步骤S902A、步骤S902B),在强调处理后的透视图像A、B中,通过模板匹配,分别计算出匹配评分(步骤S903A、步骤S903B)。
运动体跟踪控制装置105根据计算出的匹配评分,分别提取透视图像A和透视图像B中的标靶3的位置的候选(步骤S904A、步骤S904B)。
然后,运动体跟踪控制装置105根据提取的候选位置,生成组合列表(步骤S905),针对全部的组合,计算出共通垂线长度(步骤S906)。另外,运动体跟踪控制装置105根据计算出的共通垂线长度和匹配评分,通过上述的方法计算出标靶3的三维位置(步骤S907)。
接着,运动体跟踪控制装置105判定标靶3的位置是否包含在选通范围(照射区域)内(步骤S908)。在步骤S908中判定为“是”(标靶3的位置包含在选通范围内)的情况下,运动体跟踪控制装置105向治疗用放射线照射控制装置103输出治疗用粒子线照射信号,治疗用放射线照射控制装置103针对治疗用放射线照射装置7等执行粒子线的出射控制,向照射对象3A照射治疗用粒子线(步骤S909)。
另一方面,在步骤S908中判定为“否”(标靶3的位置不包含在选通范围内)的情况下,运动体跟踪控制装置105使处理返回到步骤S901A、步骤S901B。
接着,运动体跟踪控制装置105判定是否有结束指示(操作者的特别指示、或由于治疗用放射线照射装置7结束了指定的照射而导致的治疗用粒子线照射结束所伴随的运动体跟踪结束的指示等)(步骤S910)。
在步骤S910中判定为“是”(有结束指示)的情况下,治疗用放射线照射控制装置103停止透视用放射线拍摄和治疗用粒子线的照射,结束运动体跟踪放射线治疗。
另一方面,在步骤S910中判定为“否”(没有结束指示)的情况下,治疗用放射线照射控制装置103使处理返回到步骤S901A、步骤S901B,继续运动体跟踪放射线治疗。
接着,说明本实施方式的效果。
上述的本实施方式的放射线治疗系统100将产生、照射放射线的加速器101、射束输送装置102、治疗用放射线照射装置7、透视用放射线检测器6A、6B、以及透视用放射线产生装置5A、5B作为一组,具备拍摄标靶3的透视图像的2组以上的透视用放射线拍摄装置4A、4B、对加速器101、射束输送装置102、治疗用放射线照射装置7进行控制的治疗用放射线照射控制装置103、根据由透视用放射线拍摄装置4A、4B拍摄所得的透视图像检测标靶3的位置由此跟踪运动体的位置的运动体跟踪控制装置105。其中,运动体跟踪控制装置105对通过2组以上的透视用放射线拍摄装置4A、4B分别得到的透视图像中的特定大小的像进行强调,求出表示在进行了强调处理的图像中检测出标靶3的位置候选的准确性的值,根据表示检测的准确性的值来提取候选,计算表示在从2个以上方向拍摄到各个图像中提取的候选的位置与透视用放射线产生装置5A、5B的位置的关联的值,根据表示检测的准确性的值和表示关联的值来检测标靶3的位置,根据检测出的标靶3的位置来控制向照射对象3A照射的放射线。
由此,即使在由于被检测体2厚等的状况导致透视用放射线的拍摄条件严格并且噪声极多的情况下,运动体跟踪装置104也能够不丢失地持续跟踪标靶3。即,能够降低丢失标靶3的可能性,由此与现有技术相比,能够降低透视用放射线的强度,与现有技术相比,能够减轻透视用放射线产生装置5A、5B的使用负荷。
另外,通过降低透视用放射线的强度,还能够实现减少被检测体2的被辐射量。
进而,通过降低丢失标靶3的可能性,能够在丢失了标靶3的情况下,省去操作者使运动体跟踪装置104对标靶3进行高精度地再检测的麻烦,能够缩短照射时间。
另外,运动体跟踪控制装置105在强调处理时,根据标靶3的大小决定所强调的像的大小,因此能够更高精度地对标靶3进行强调处理,因此能够进一步降低丢失标靶3的可能性。
进而,作为强调的处理,运动体跟踪控制装置105通过从透视图像中提取基于标靶3的大小的特定的频率分量来强调特定大小的像,以及尤其使用带通滤波器、低通滤波器、高通滤波器中的任意一个以上的从图像中提取特定的频率分量的滤波器来强调特定大小的像,由此能够更准确地强调标靶3,可以进一步降低丢失标靶3的可能性。
另外,作为强调的处理,运动体跟踪控制装置105通过针对透视图像对基于标靶3的大小的特定的区域进行平滑化从而强调特定大小的像,以及尤其使用平滑滤波器、中值滤波器、高斯滤波器中的任意一个以上的对特定区域进行平滑化的滤波器来强调特定大小的像,由此也能够更准确地强调标靶3,可以进一步降低丢失标靶3的可能性。
进而,表示关联的值是在连接透视图像中的标靶3的候选的位置和透视用放射线产生装置5A、5B的位置的2条以上的线之间以最短的方式连接起来的共通垂线32的长度。如上述那样,根据共通垂线的长度变长的情况而检测出标靶3的错误检测,因此通过使用共通垂线的长度作为表示关联的值,能够提高标靶3的检测精度,能够降低错误检测的频率。
进而,运动体跟踪控制装置105和治疗用放射线照射控制装置103在标靶3的位置处于预先指定的范围内时照射治疗用粒子线,由此能够实现提高向照射对象3A的粒子线的照射精度。
另外,就表示检测的准确性的值而言,通过基于模板匹配的匹配评分,可以针对强调处理后的透视图像提高识别处理的速度,并且以区别与标靶3类似的对象和标靶3的方式来进行搜索,从而能够进一步抑制丢失标靶3的情况。
进而,运动体跟踪控制装置105对表示检测的准确性的值和表示关联的值进行加权,根据该加权的结果检测标靶3的位置,由此即使在X射线拍摄条件严格的情况下,也能够更正确地检测出标靶3的位置,可以有助于进一步缩短照射时间。
<其他>
此外,本发明并不限于上述实施方式,能够进行各种变形、应用。为了以容易理解的方式说明本发明而详细说明了上述实施方式,但并不一定限于具备所说明的全部结构。
例如,虽然说明了对匹配评分和共通垂线进行加权而根据该加权的结果检测标靶3的位置的情况,但在各透视图像中得到了匹配评分高于规定的值的多个候选位置时,将得到多条共通垂线,然而可以使运动体跟踪控制装置105构成为能够将以下候选位置检测为标靶3的位置,该候选位置将获得与所得到的多条共通垂线中的最短那条对应的匹配评分。
在这样的结构中,也能够降低丢失标靶3的频率,可以减轻透视用放射线产生装置5A、5B的使用负荷。
另外,作为候选位置的提取方法,举例说明了根据模板匹配的匹配评分而进行的方法,但并不限于此。
例如,作为标靶3的候选位置的提取方法的其他例子,可以将运动体跟踪控制装置105构成为针对各透视图像的每个关注像素,设定包含关注像素周边的2个以上的第一像素的第一区域、以及包含与2个以上的第一像素不同的1个以上的第二像素的第二区域,计算出似然度,并根据该似然度提取候选位置,就该似然度而言,2个以上的第一像素的像素值越相互接近、并且2个以上的第一像素的像素值与1个以上的第二像素的像素值越远离则值越大。
在这样的结构中,也可以降低丢失标靶3的频率,减轻透视用放射线产生装置5A、5B的使用负荷。
进而,使用共通垂线的长度作为表示关联的值,但也可以使用其他长度来代替共通垂线。
例如如图10所示,考虑以下的情况:在透视图像A和透视图像B为轴相互垂直的图像时,图像A投影到xy平面,图像B投影到xz平面。
在图10中,虚线28A表示从透视用放射线产生装置5A通过等深点31的直线,虚线28B表示从透视用放射线产生装置5B通过等深点31的直线。这时,连接透视用放射线检测器6A的位置和透视用放射线产生装置5A的虚线28A与连接透视用放射线检测器6B的位置和透视用放射线产生装置5B的虚线28B垂直。另外,这时的x轴是共通的。因此,作为模板匹配的结果所得到的标靶3的x坐标在理想状态下是一致的,实际上有时产生偏差。
也可以使用根据该图像A和图像B得到的x坐标的差,来代替共通垂线的长度。将这时的x轴称为共通轴,将该x轴的差分称为共通轴的长度。通过将这样的共通轴的长度用作表示关联的值,也能够降低丢失标靶3的频率。
进而,在2个透视图像不是垂直的关系的情况下,也能够求出与2个图像平行的直线。在该情况下,可以将该直线作为共通轴,使用共通轴的差来代替共通垂线的长度。
另外,在上述实施方式中,举例说明了使用球形的标靶3的情况,但标靶3的形状也可以是线圈状。
另外,虽然说明了将跟踪对象作为标靶3的情况,但跟踪对象并不限于标靶3,也可以不使用标靶3而直接检测照射对象3A。进而,跟踪对象可以为被检测体2内的高密度区域、例如肋骨等骨骼等。
另外,照射方法也可以是根据标靶3等的位置跟踪照射位置的跟踪照射,来代替选通照射。例如在X射线的跟踪照射中,与标靶的运动一致地变更形成分布用的X射线产生装置的方向,与标靶的运动一致地变更X射线的照射位置。在粒子线的情况下,也能够通过与标靶的位置一致地调整扫描电磁铁的励磁量来进行跟踪照射。
另外,有时在2个透视图像中只根据一方的透视图像难以检测出标靶3。在这样的情况下,也可以在容易检测出标靶3的透视图像中,如以前那样只跟踪匹配评分最高的候选,只在难以检测标靶3的透视图像中对标靶3的候选进行列表化,并根据各个匹配评分和共通垂线的长度检测标靶3。将一方的透视图像的标靶3的候选设为一个,从而能够在较短的计算时间内进一步减少错误检测。
- 运动体跟踪装置和放射线治疗系统以及运动体的跟踪方法
- 移动体跟踪装置、移动体跟踪方法及计算机可读记录介质