多轴间距可变的螺栓拧紧机构
文献发布时间:2023-06-19 09:29:07
技术领域
本发明涉及一种螺栓拧紧机构,特别涉及一种多轴间距可变的螺栓拧紧机构。
背景技术
由于工业自动化的发展,螺栓自动拧紧机构得到广泛应用,特别是同一平面多颗螺栓的拧紧要求中,为保证拧紧质量,实现多颗螺栓的同步拧紧成为过程工艺的要求;同时在市场多品种小批量的需求特点下,对生产线的多机型兼容生产也提出了相应要求。而针对多机型共线生产,且该工位所需拧紧螺栓较多、螺栓间距均不一致时,则对设备的设计提出了难题,现有通用的气缸变距、伺服变距尽管可以提供多间距变距,但在设备的空间也无法进行布局。以直列四缸发动机缸盖连接螺栓为例,通常产品设计为10颗螺栓双列排布,当出现多种机型不同螺栓间距的拧紧要求时,按现有方法,则需给每根拧紧轴配上1个变距气缸模组或变距伺服模组,总计10组变距模组通常是无法布局于单个缸盖拧紧工位上,若按此设计方案,所需耗费制造成本及后续维护成本很高、制造周期较长。
发明内容
本发明的目的是针对上述现有技术存在的缺陷,提供一种结构设计巧妙、制造成本较低的多轴间距可变的螺栓拧紧机构,其拧紧轴之间的轴间距可调整变化,可用于拧紧不同轴间距的多组螺栓。
本发明为实现上述目的采用的技术方案是:一种多轴间距可变的螺栓拧紧机构,包括基板、拧紧轴、拧紧轴安装板、X轴方向驱动调整机构、Y轴方向驱动调整机构,基板中部设有可供拧紧轴底端穿过的矩形通孔,拧紧轴安装板设置在矩形通孔上侧,拧紧轴垂直安装在拧紧轴安装板上且底端穿过基板的矩形通孔,X轴方向驱动调整机构包括X轴方向变距气缸、X轴方向限位气缸、X轴方向移动机构,X轴方向变距气缸和X轴方向限位气缸分别设置在基板底面,X轴方向限位气缸设置在X轴方向变距气缸的一侧且X轴方向限位气缸的活塞杆连接有可限制X轴方向变距气缸活塞杆位置的限位机构Ⅰ,X轴方向移动机构设置在基板上表面,X轴方向变距气缸与X轴方向移动机构连接并可推动X轴方向移动机构移动,X轴方向移动机构与拧紧轴安装板底面连接,Y轴方向驱动调整机构包括Y轴方向变距伺服模组和Y轴方向移动机构,Y轴方向移动机构设置在基板上表面,Y轴方向变距伺服模组设置在基板上表面并可推动Y轴方向移动机在Y轴方向移动,Y轴方向移动机与拧紧轴安装板顶部连接。
本发明的进一步技术方案是:所述拧紧轴在Y轴方向分两排设置, 拧紧轴安装板在Y轴方向也分两排设置,两排拧紧轴安装板在X轴方向分别相互一一对应,每根拧紧轴垂直安装在一块拧紧轴安装板上,每块拧紧轴安装板上表面连接有一个凸轮随动器,Y轴方向移动机通过驱动凸轮随动器而驱动拧紧轴安装板在Y轴方向移动。
本发明的进一步技术方案是:所述Y轴方向移动机包括两条滑轨Ⅰ、四块滑块Ⅰ、两块板Ⅴ,两条滑轨Ⅰ分别相互平行的设置在矩形通孔Y轴方向两条侧边外缘的基板上表面,每条滑轨Ⅰ上设置有两块滑块Ⅰ,两条滑轨Ⅰ上的滑块Ⅰ位置相互对应,两块板Ⅴ分别连接在两条滑轨Ⅰ上位置相互对应的两块滑块Ⅰ之间,且两块板Ⅴ还分别位于两排拧紧轴安装板的上侧,每块板Ⅴ上设有与其下侧一排拧紧轴安装板上的凸轮随动器位置相互对应的凸轮槽Ⅰ,拧紧轴安装板上的凸轮随动器分别定位在对应板Ⅴ的凸轮槽Ⅰ中,Y轴方向变距伺服模组设置在其中一条滑轨Ⅰ外侧的基板上表面并与其临近滑轨Ⅰ上的滑块Ⅰ相互连接。
本发明的进一步技术方案是:所述凸轮槽Ⅰ为直线状的长条形通槽。
本发明的进一步技术方案是:所述Y轴方向变距伺服模组包括两个伺服电机,两个伺服电机并排设置在其中一条滑轨Ⅰ外侧的基板上表面,每个伺服电机输出轴通过转换装置与滑轨Ⅰ上其中一个滑块Ⅰ连接。
本发明的进一步技术方案是:所述X轴方向移动机构包括两条滑轨Ⅱ、两条滑轨Ⅲ以及板Ⅰ、板Ⅱ、板Ⅲ,两条滑轨Ⅱ相互平行的设置在矩形通孔X轴方向两条侧边外缘的基板上表面,且两条滑轨Ⅱ分别与两条滑轨Ⅰ垂直并位于两条滑轨Ⅰ的内侧,两条滑轨Ⅲ设置在其中一条滑轨Ⅱ外侧的基板上表面,两条滑轨Ⅲ分别与滑轨Ⅱ垂直,板Ⅰ通过连接在其底面的滑块可滑动的连接在两条滑轨Ⅲ上,板Ⅰ上表面设有多个变距凸轮随动器,板Ⅰ下侧的基板在靠近板Ⅰ中部位置设有贯穿的通槽,与X轴方向变距气缸活塞杆连接的推拉块穿过通槽与板Ⅰ底面连接并可推动板Ⅰ在滑轨Ⅲ上滑移;板Ⅱ和板Ⅲ的数量与Y轴方向每排拧紧轴安装板的数量相同并与X轴方向拧紧轴安装板的位置相互一一对应,板Ⅱ相互平行的设置在板Ⅰ的上方,每块板Ⅱ上设有与板Ⅰ上其中一个变距凸轮随动器相互配合的凸轮槽Ⅱ,板Ⅲ设置在两条滑轨Ⅱ的上方并位于拧紧轴安装板下方,板Ⅲ两端底部分别通过滑块连接在两条滑轨Ⅱ上,板Ⅲ两端上表面分别连接有滑轨Ⅳ,Y轴方向两排拧紧轴安装板的下表面分别通过滑块与滑轨Ⅳ连接,每块板Ⅱ内侧末端分别向内延伸设有与每块板Ⅲ上表面连接的连接凸块。
本发明的进一步技术方案是:所述凸轮槽Ⅱ是由多段直线首尾连接形成的斜槽。
本发明的进一步技术方案是:所述板Ⅲ是两端设有突出部而中部设有凹陷部的“凹”字形结构钢板,板Ⅲ两端突出部的下表面分别通过滑块连接在两条滑轨Ⅲ上,板Ⅲ两端突出部的上表面分别连接有滑轨Ⅳ,安装在拧紧轴安装板上的拧紧轴底端向下穿过板Ⅲ的凹陷部后再穿过基板的矩形通孔。
本发明的进一步技术方案是:在通槽相对两侧的基板底面上设有用于限制与X轴方向变距气缸活塞杆连接推拉块运动行程的限位机构Ⅱ和限位机构Ⅲ。
本发明多轴间距可变的螺栓拧紧机构具有如下有益效果:在基板上设置X轴方向驱动调整机构、Y轴方向驱动调整机构,X轴方向驱动调整机构、Y轴方向驱动调整机构能够调整拧紧轴安装板的位置,进而调整拧紧轴之间的间距,最终实现拧紧轴之间的轴间距可调整变化,可用于拧紧不同轴间距的多组螺栓,提高设备通用性;同时,由一个X轴方向变距气缸一次性驱动实现多把拧紧轴在X轴方向变位到所需位置,一组Y轴方向变距伺服模组驱动多把拧紧轴在Y轴方向变位到所需位置,整体结构简单,性能可靠,降低设备制造成本,也便于设备管理和后续维护。
下面结合附图和实施例对本发明多轴间距可变的螺栓拧紧机构作进一步的说明。
附图说明
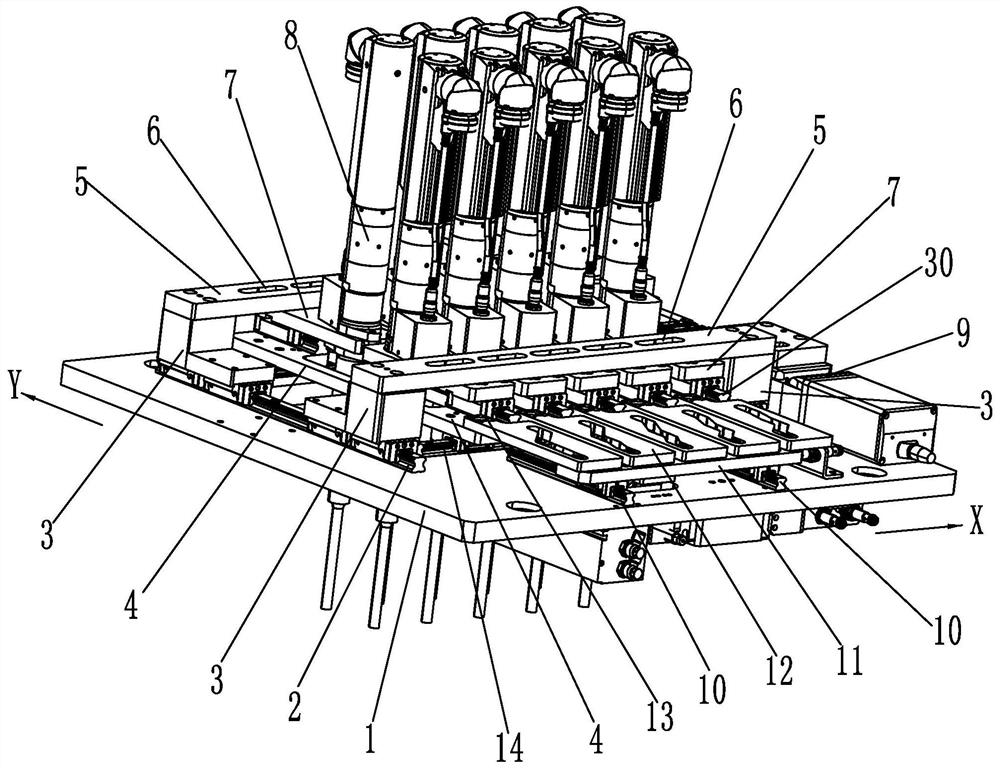
图1是本发明多轴间距可变的螺栓拧紧机构的结构示意图;
图2是图1所示多轴间距可变的螺栓拧紧机构的另一方向视图;
图3是图1所示多轴间距可变的螺栓拧紧机构的省略拧紧轴、两块板Ⅴ及板Ⅱ后的视图;
图4是图3的另一方向视图;
图5是在图3基础上省略拧紧轴安装板和部分板Ⅲ、滑轨Ⅳ后的视图;
图6是本发明多轴间距可变的螺栓拧紧机构实施例一的结构示意图;
图7是实施例一所拧紧发动机缸盖上十颗连接螺栓间距的示意图;
图8是本发明多轴间距可变的螺栓拧紧机构实施例二的结构示意图;
图9是实施例二所拧紧发动机缸盖上十颗连接螺栓间距的示意图;
图10是本发明多轴间距可变的螺栓拧紧机构实施例三的结构示意图;
图11是实施例三所拧紧发动机缸盖上十颗连接螺栓间距的示意图;
附图标号说明:1-基板,2-滑轨Ⅰ,3-滑块Ⅰ,4-板Ⅲ,5-板Ⅴ,6-凸轮槽Ⅰ,7-拧紧轴安装板,8-拧紧轴,9-Y轴方向变距伺服模组,10-滑轨Ⅲ,11-板Ⅰ,12-板Ⅱ,13-连接凸块,14-滑轨Ⅱ,15-伺服电机,16-转换装置,17-凸轮随动器,18-凸轮槽Ⅱ,19-变距凸轮随动器,20-矩形通孔,21-通槽,22-X轴方向变距气缸,23-限位机构Ⅱ,24-推拉块,25- X轴方向限位气缸,26-限位机构Ⅰ,27-限位机构Ⅲ,28-Y轴方向侧边,29-X轴方向侧边,30-滑轨Ⅳ。
具体实施方式
如图1至图5所示,本发明一种多轴间距可变的螺栓拧紧机构,包括基板、拧紧轴、拧紧轴安装板、X轴方向驱动调整机构、Y轴方向驱动调整机构。图1中箭头X所指的方向为X轴方向,箭头Y所指的方向为Y轴方向。基板是一块钢板,基板中部设有可供拧紧轴底端穿过的矩形通孔,矩形通孔有两条X轴方向侧边和两条Y轴方向侧边,在X轴方向的侧边为X轴方向侧边,在Y轴方向的侧边为Y轴方向侧边。拧紧轴安装板设置在矩形通孔上侧,拧紧轴垂直安装在拧紧轴安装板上且底端穿过基板的矩形通孔。在本实施例中,所述拧紧轴在Y轴方向分两排设置, 拧紧轴安装板在Y轴方向也分两排设置,两排拧紧轴安装板在X轴方向分别相互一一对应,即其中一排五块拧紧轴安装板和另一排五块拧紧轴安装板分别一一对齐,每排拧紧轴安装板设有五块拧紧轴安装板。每根拧紧轴垂直安装在一块拧紧轴安装板上,每块拧紧轴安装板上表面连接有一个凸轮随动器,Y轴方向移动机通过驱动凸轮随动器而驱动拧紧轴安装板在Y轴方向移动。当然每排拧紧轴安装板的数量并不限于为五块,可根据需要扭紧螺栓的数量而设置。
如图1至图4所示,Y轴方向驱动调整机构包括Y轴方向变距伺服模组和Y轴方向移动机构。Y轴方向移动机构设置在基板上表面,Y轴方向变距伺服模组设置在基板上表面并可推动Y轴方向移动机在Y轴方向移动,Y轴方向移动机与拧紧轴安装板顶部的凸轮随动器连接。其中Y轴方向移动机包括两条滑轨Ⅰ、四块滑块Ⅰ、两块板Ⅴ。两条滑轨Ⅰ分别相互平行的设置在矩形通孔Y轴方向两条侧边(即Y轴方向侧边)外缘的基板上表面,每条滑轨Ⅰ上设置有两块滑块Ⅰ,两条滑轨Ⅰ上的滑块Ⅰ位置相互对应,两块板Ⅴ分别连接在两条滑轨Ⅰ上位置相互对应的两块滑块Ⅰ之间,且两块板Ⅴ还分别位于两排拧紧轴安装板的上侧,每块板Ⅴ上设有与其下侧一排拧紧轴安装板上的凸轮随动器位置相互对应的凸轮槽Ⅰ,凸轮槽Ⅰ为直线状的长条形通槽。拧紧轴安装板上的凸轮随动器分别定位在对应板Ⅴ的凸轮槽Ⅰ中。Y轴方向变距伺服模组设置在其中一条滑轨Ⅰ外侧的基板上表面并与其临近滑轨Ⅰ上的滑块Ⅰ相互连接。所述Y轴方向变距伺服模组包括两个伺服电机,两个伺服电机并排设置在其中一条滑轨Ⅰ外侧的基板上表面,每个伺服电机输出轴通过转换装置与滑轨Ⅰ上其中一个滑块Ⅰ连接。
如图1至图5所示,X轴方向驱动调整机构包括X轴方向变距气缸、X轴方向限位气缸、X轴方向移动机构。X轴方向变距气缸和X轴方向限位气缸分别设置在基板底面,X轴方向限位气缸设置在X轴方向变距气缸的一侧且X轴方向限位气缸的活塞杆连接有可限制X轴方向变距气缸活塞杆位置的限位机构Ⅰ。X轴方向移动机构设置在基板上表面,X轴方向变距气缸与X轴方向移动机构连接并可推动X轴方向移动机构移动,X轴方向移动机构与拧紧轴安装板底面连接。其中X轴方向移动机构包括两条滑轨Ⅱ、两条滑轨Ⅲ以及板Ⅰ、板Ⅱ、板Ⅲ。两条滑轨Ⅱ相互平行的设置在矩形通孔X轴方向两条侧边(即X轴方向侧边)外缘的基板上表面,且两条滑轨Ⅱ分别与两条滑轨Ⅰ垂直并位于两条滑轨Ⅰ的内侧。两条滑轨Ⅲ设置在其中一条滑轨Ⅱ外侧的基板上表面,两条滑轨Ⅲ分别与滑轨Ⅱ垂直。板Ⅰ通过连接在其底面的滑块可滑动的连接在两条滑轨Ⅲ上,板Ⅰ上表面设有多个变距凸轮随动器,变距凸轮随动器的数量与板Ⅱ的数量相同。板Ⅰ下侧的基板在靠近板Ⅰ中部位置设有贯穿的通槽,与X轴方向变距气缸活塞杆连接的推拉块穿过通槽与板Ⅰ底面连接并可推动板Ⅰ在滑轨Ⅲ上滑移。在通槽相对两侧的基板底面上设有用于限制与X轴方向变距气缸活塞杆连接推拉块运动行程的限位机构Ⅱ和限位机构Ⅲ。
板Ⅱ和板Ⅲ的数量与Y轴方向每排拧紧轴安装板的数量相同并与X轴方向拧紧轴安装板的位置相互一一对应,在本实施例中板Ⅱ和板Ⅲ分别设置五块。板Ⅱ相互平行的设置在板Ⅰ的上方,每块板Ⅱ上设有与板Ⅰ上其中一个变距凸轮随动器相互配合的凸轮槽Ⅱ,凸轮槽Ⅱ是由多段直线首尾连接形成的斜槽,凸轮槽Ⅱ用于定位变距凸轮随动器,凸轮槽Ⅱ的轮廓由所需拧紧螺栓间距决定,可根据所需拧紧螺栓的间距设置不同轮廓的凸轮槽Ⅱ。板Ⅲ设置在两条滑轨Ⅱ的上方并位于拧紧轴安装板下方,板Ⅲ两端底部分别通过滑块连接在两条滑轨Ⅱ上,板Ⅲ两端上表面分别连接有滑轨Ⅳ,Y轴方向两排拧紧轴安装板的下表面分别通过滑块与滑轨Ⅳ连接,每块板Ⅱ内侧末端分别向内延伸设有与每块板Ⅲ上表面连接的连接凸块,每块板Ⅱ的连接凸块与板Ⅲ螺栓连接。其中所述板Ⅲ是两端设有突出部而中部设有凹陷部的“凹”字形结构钢板,板Ⅲ两端突出部的下表面分别通过滑块连接在两条滑轨Ⅲ上,板Ⅲ两端突出部的上表面分别连接有滑轨Ⅳ,安装在拧紧轴安装板上的拧紧轴底端向下穿过板Ⅲ的凹陷部后再穿过基板的矩形通孔。
X轴方向变距:X轴方向变距气缸驱动带有变距凸轮随动器的板Ⅰ在滑轨Ⅲ上前后动作,板Ⅰ拉动板Ⅱ移动,板Ⅱ拉动板Ⅲ移动,板Ⅲ带动拧紧轴安装板和拧紧轴移动,通过板Ⅱ上的凸轮槽Ⅱ斜度实现拧紧轴在X轴方向变位; X轴方向变距气缸驱动X轴方向移动机构达到预定位置时,由X轴方向限位气缸限制X轴方向变距气缸的位置,使拧紧轴位置精确不变,便于准确的完成拧紧作业;X轴方向变距气缸、X轴方向限位气缸共同实现三个位置变位,X轴方向变化的距离由板Ⅱ上凸轮槽Ⅱ的斜度决定,变距凸轮随动器在凸轮槽Ⅱ中的位置决定拧紧轴在X轴方向的位置;Y轴方向的前后两排拧紧轴的拧紧轴安装板通过直线模组连接在同一块零件板Ⅲ上,从而实现十把拧紧轴在X轴方向上同时变距。
Y轴方向变距:Y轴方向的Y轴方向变距伺服模组驱动滑块Ⅰ在Y轴方向前后移动,滑块Ⅰ带动板Ⅴ在Y轴方向前后移动,板Ⅴ通过凸轮槽Ⅰ与凸轮随动器配合联动拧紧轴安装板,拧紧轴安装在拧紧轴安装板上,使单侧五把拧紧轴在Y轴方向上同时变距。
本实施例将发明一种多轴间距可变的螺栓拧紧机构用于拧紧发动机缸盖上十颗连接螺栓。实施例一:通过X轴方向变距气缸和Y轴方向变距伺服模组同时控制拧紧轴的位置,当在X轴方向变距气缸的驱动下变距凸轮随动器在板Ⅱ的凸轮槽Ⅱ内侧末端位置,同时Y轴方向变距伺服模组驱动板Ⅴ到上止点,如图6所示,此时十个拧紧轴中相邻拧紧轴在X轴方向的间距为83mm、Y轴方向的间距为93.6mm,与图7中所示发动机缸盖上十颗连接螺栓间距相互对应,控制X轴方向限位气缸的限位机构Ⅰ与限位机构Ⅱ限制与X轴方向变距气缸活塞杆连接的推拉块的位置,防止推拉块移动引起拧紧轴位置发生变化;螺栓拧紧机构可用于拧紧对应图7中所示间距的发动机缸盖十颗连接螺栓。实施例二:通过X轴方向变距气缸和Y轴方向变距伺服模组同时控制拧紧轴的位置,当在X轴方向变距气缸的驱动下变距凸轮随动器在板Ⅱ的凸轮槽Ⅱ中部位置,Y轴方向变距伺服模组驱动板Ⅴ到中止点,如图8所示,此时十个拧紧轴中相邻拧紧轴在X轴方向的间距为82mm、Y轴方向的间距为86mm,与图9中所示发动机缸盖上十颗连接螺栓间距相互对应,控制X轴方向限位气缸的限位机构Ⅰ限制与X轴方向变距气缸活塞杆连接的推拉块的位置;螺栓拧紧机构可用于拧紧对应图9中所示间距的发动机缸盖十颗连接螺栓。实施例三:通过X轴方向变距气缸和Y轴方向变距伺服模组同时控制拧紧轴的位置,当在X轴方向变距气缸的驱动下变距凸轮随动器在板Ⅱ的凸轮槽Ⅱ外侧末端位置,Y轴方向变距伺服模组驱动板Ⅴ到下止点,如图10所示,此时十个拧紧轴中相邻拧紧轴在X轴方向的间距为76mm、Y轴方向的间距为82mm,与图11中所示发动机缸盖上十颗连接螺栓间距相互对应,控制X轴方向限位气缸的限位机构Ⅰ与限位机构Ⅲ限制与X轴方向变距气缸活塞杆连接的推拉块的位置;螺栓拧紧机构可用于拧紧对应图11中所示间距的发动机缸盖十颗连接螺栓。
以上实施例仅为本发明的较佳实施例,本发明的结构并不限于上述实施例列举的形式,凡在本发明的精神和原则之内所作的任何修改、等同替换等,均应包含在本发明的保护范围之内。
- 多轴间距可变的螺栓拧紧机构
- 一种四轴双向可变间距的U型螺栓电动拧紧设备