一种控制无人机武器平台悬停装置
文献发布时间:2023-06-19 09:30:39
技术领域
本发明涉及无人机控制技术领域,尤其涉及一种控制无人机武器平台悬停装置。
背景技术
现代军用无人机的任务范围已经由传统的空中侦察、战场观察和毁伤评估等扩大到战场抑制、对地攻击、拦截巡航导弹,甚至空中格斗等领域。无人机携带制导炸弹或导弹,在侦查过程中发现敌方临时出现的重要目标可进行实时攻击,实现“察打结合”,充分发挥武器装备的作战效能,无人机载武器平台主要包括光电系统、发射仓及相关电气系统,武器平台挂载在无人机上,以实现对目标的搜索、跟踪、锁定和打击,机载武器平台的稳定瞄准较为困难,这是因为武器平台受到无人机运动、机体震动、目标运动等外在因素的影响,使其既有大幅度的机体与目标的相对运动,也有高频率的自身姿态变化,无人机在空中悬停时不能空中其悬停的角度,因此提出一种空中无人机悬停装置。
发明内容
本发明的目的是为了解决现有技术中存在的缺陷,而提出的一种控制无人机武器平台悬停装置。
为了实现上述目的,本发明采用了如下技术方案:
一种控制无人机武器平台悬停装置,包括第一转轴、第二转轴和第三转轴,所述第一转轴两端贯穿并通过轴承活动连接在第一安装箱中,所述第一安装箱固定安装在机壳中,所述第一转轴上固定套接有第一齿轮,所述第一齿轮与第二齿轮啮合,所述第二齿轮固定套接在步进电机输出轴上,所述第三转轴两端贯穿并通过轴承活动套接在第二安装箱中,所述第三转轴上固定连接有第二锥形齿轮,所述第二锥形齿轮数量为两个,其中一个所述第二锥形齿轮固定套接在步进电机输出轴上,所述第二转轴两端分别贯穿延伸至第一安装箱与第二安装箱内并连接在第一锥形齿轮上。
进一步地,所述第一转轴与第三转轴两端均设有扇叶以及用于驱动扇叶的电机。
进一步地,所述第二转轴两端的第一锥形齿轮分别与两个第二锥形齿轮啮合。
进一步地,两个所述第二锥形齿轮呈镜像状。
相比于现有技术,本发明的有益效果在于:
通过设置步进电机带动第二齿轮和第二锥形齿轮转动,从而带动第一齿轮与第二锥形齿轮上的第一转轴和第三转轴转动,从而使第一转轴和第三转轴同时顺时针转动,使得无人机在空中有角度的悬停。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
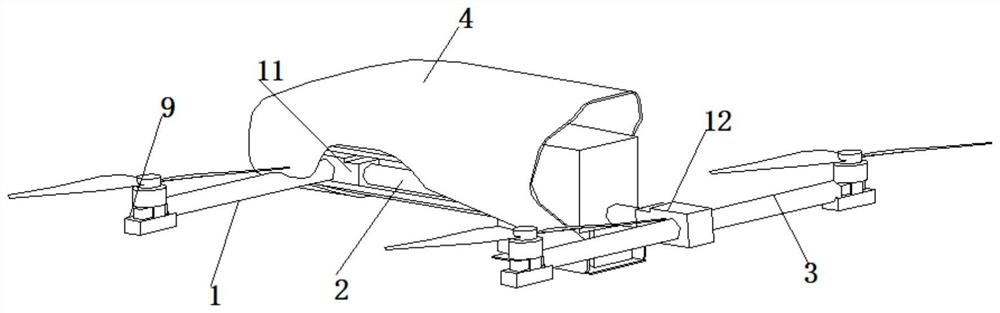
图1为本发明提出的整体结构示意图;
图2为本发明提出的整体结构俯视剖面图。
图中:1第一转轴、2第二转轴、3第三转轴、4机壳、5第一齿轮、6第二齿轮、7第一锥形齿轮、8第二锥形齿轮、9扇叶、10步进电机、11第一安装箱、12第二安装箱。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
参照图1-2,一种控制无人机武器平台悬停装置,包括第一转轴1、第二转轴2和第三转轴3,第一转轴1两端贯穿并通过轴承活动连接在第一安装箱11中,第一安装箱11固定安装在机壳4中,第一转轴1上固定套接有第一齿轮5,第一齿轮5与第二齿轮6啮合,第二齿轮6固定套接在步进电机10输出轴上,第三转轴3两端贯穿并通过轴承活动套接在第二安装箱12中,第三转轴3上固定连接有第二锥形齿轮8,第二锥形齿轮8数量为两个,其中一个第二锥形齿轮8固定套接在步进电机10输出轴上,两个第二锥形齿轮8呈镜像状,第二转轴2两端分别贯穿延伸至第一安装箱11与第二安装箱12内并连接在第一锥形齿轮7上,第二转轴2两端的第一锥形齿轮7分别与两个第二锥形齿轮8啮合,第一转轴1与第三转轴3两端均设有扇叶9以及用于驱动扇叶9的电机,第一转轴1与第三转轴3转动角度在0-30°之间。
本发明的工作原理及使用流程:通过步进电机10带动步进电机10上的第二齿轮6与第二锥形齿轮8转动,从而带动第一齿轮5和第一锥形齿轮7转动,第一锥形齿轮7与第三转轴3上的第二锥形齿轮8啮合,从而使第一转轴1和第三转轴3会同时顺时针小角度转动,使得无人机在空中可以有角度的悬停。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种控制无人机武器平台悬停装置
- 多旋翼无人机悬停控制方法、装置、多旋翼无人机及存储介质