升降带、升降系统及空中运送系统
文献发布时间:2023-06-19 09:30:39
技术领域
本发明涉及物料搬运系统领域,尤其涉及一种升降带、升降系统及空中运送系统。
背景技术
随着信息科技日新月异,集成电路在日常生活中扮演重要的角色,其需求相对也大幅提升,因此促进全球半导体市场的蓬勃发展。为了因应集成电路的大量需求,大部分的半导体制造企业都以提高产能为优先目标。在半导体制造企业中,晶片通常是采用批量的搬运方式,然而通过人力搬运不仅效率低,也容易发生危险,因此,自动物料搬运系统(AutomaticMaterial Handling System;AMHS)已经广泛使用于半导体制造企业。
空中运输系统(OHT;Overhead-Hoist-Transportation)是一种搬运物料(FOUP;FrontOpeningUnifiedPod)的系统,因其具有更大的空间自由度而经常被应用在自动物料搬运系统中。
图1是现有的空中运输系统的示意图。请参阅图1,空中运输系统包括台车(Vehicle)10、卡盘(Chuck)12及升降带(Belt)13。所述卡盘12通过所述升降带13连接至所述台车10。所述台车10能够沿设置在空中的轨道移动,进而带动所述卡盘12移动。所述卡盘12带动物料20移动。
图2A~图2C是采用图1所示的空中运输系统在机台设备上放置物料的过程示意图。
请参阅图2A,所述卡盘12抓取物料20,所述台车10沿轨道移动,进而带动所述卡盘12抓取所述物料20移动至目标机台设备21上方。
请参阅图2B,所述升降带13下降,进而带动所述盘12下降至设定高度,并将物料20放在机台设备21上。
请参阅图2C,将所述物料20放置在所述机台设备21上后,所述升降带13上升,进而带动所述卡盘12上升至下降前的原始高度。
至此,空中运输系统在机台设备上放置物料的过程结束。空中运输系统从所述机台设备21上取物料的过程与上述放置物料的过程类似,不再详述。
所述卡盘12的上升及下降是由电机通过升降带13牵引实现的,所述升降带13在收缩与伸展的过程中伸出部分会受到气流的影响产生振动从而引起卡盘12产生振动。另外,电机在启动和停止的过程中也会造成卡盘12的振动。这些振动因素不利于所述卡盘12抓取物料及放置物料的准确定位,卡盘12会在准确定位这一过程浪费较多时间;同时,振动会限制所述卡盘12的升降加速度,这是由于卡盘12的升降加速度越快,则在卡盘起始动作时振动就会越大,越不利于卡盘12的定位。
所述升降带13的振动形式主要为摆动振动(请参阅图2D)、简谐振动(请参阅图2E)及纵向振动(请参阅图2F)。在图2D、图2E及图2F中,采用实线绘示所述升降带13的初始位置,采用虚线示意性地绘示所述升降带13振动过程中的位置。其中,在图2F中,由于升降带13为纵向移动,其振动轨迹会被升降带13初始位置示意图覆盖,因此,为了清楚显示升降带13的位置,在右侧示意性绘示升降带13的示意图。从图2D、图2E及图2F可以看出,所述升降带13的三种振动形式均会引起升降带13与卡盘12连接端的振动,从而会导致所述卡盘12的振动,因此,如何避免所述升降带13的振动,成为亟需解决的技术问题。
电流变液(Electrorheological Fluids,ERF)是指在外加高压电场作用下呈现出强烈电流变效应的流体,是一种流变特性随外加电场的变化而产生急剧变化的流体。电流变液在电场足够高和剪切应力恒定的情况下能够固化呈粘弹性固体,表现为宾汉流体特性(Bingham Behavior);一旦撤除外加电场,流体又迅速恢复至液体状态,呈牛顿流体特性(Newton behavior)。电流变液一般由基础液、固体粒子和添加剂组成,其中添加剂能够防止固体粒子沉降。
发明内容
本发明所要解决的技术问题是,提供一种升降带、升降系统及空中运送系统,其能够在适当的时候能够增加所述升降带的强度,避免升降带振动,从而提高升降系统的稳定性。
为了解决上述问题,本发明提供了一种升降带,其包括:绝缘本体,沿第一方向延伸;多个电流变液腔,沿所述第一方向依序设置在所述绝缘本体内,所述电流变液腔内填充有电流变液;第一电极及第二电极,设置在所述电流变液腔的两相对内壁,且所述电流变液与所述第一电极及所述第二电极接触,改变所述第一电极及所述第二电极的通电状态以使所述电流变液在液态与固态之间转换。
进一步,所述绝缘本体包括第一层及第二层,所述第一层设置有多个凹槽,所述第一电极设置在所述凹槽底部,所述电流变液填充在所述凹槽内,所述第二层设置有所述第二电极,所述第一层与所述第二层贴合,所述电流变液与所述第一电极及所述第二电极接触。
进一步,所述升降带还包括设置在所述绝缘本体内的第一连接线及第二连接线,所述第一连接线将所述第一电极与外部电源电连接,所述第二连接线将所述第二电极与外部电源电连接。
进一步,所述升降带还包括设置在所述绝缘本体内的第一备用连接线及第二备用连接线,在所述第一连接线及所述第二连接线损坏时,所述第一备用连接线将所述第一电极与外部电源电连接,所述第二备用连接线将所述第二电极与外部电源电连接。
进一步,在第二方向上,多个所述电流变液腔依序设置,所述第二方向与所述第一方向垂直。
本发明还提供一种采用上述的升降带升降系统,其包括:至少一固定转轴;至少一所述升降带,所述升降带的一端为承载端,所述承载端绕过所述固定转轴自第一位置朝向第二位置延伸;驱动装置,用于收放所述升降带,以使所述承载端在所述第一位置与所述第二位置之间移动;控制装置,与所述升降带电连接,用于向所述升降带位于所述第一位置及所述第二位置之间的区域施加电压,以使该区域的电流变液固化。
进一步,所述升降带与所述转轴接触区域具有上界线及下界线,所述下界线为所述第一位置。
进一步,当所述承载端位于所述第二位置时,所述控制装置也用于向所述升降带与所述转轴接触区域施加电压,以使该接触区域的电流变液固化。
进一步,所述升降系统还包括长度检测装置,所述长度检测装置与所述驱动装置电连接,用于检测所述升降带伸出长度,并将信号传递给所述控制装置,所述控制装置根据该信号向所述升降带位于所述第一位置及所述第二位置之间的区域施加电压。
进一步,所述升降系统还包括振动检测装置,所述振动检测装置设置在所述升降带上,以检测所述升降带的振动强度及振动方向,并将信号传递给所述控制装置,所述控制装置用于根据该信号改变施加在所述升降带上的电压。
进一步,所述驱动装置为电机。
本发明还提供一种空中运输系统,其包括如上所述的升降系统。
本发明的优点在于,将电流变液设置在升降带中,所述电流变液能够在液态与固态之间转换,在适当的时候能够增加所述升降带的强度,避免升降带振动,从而提高升降系统的稳定性。
附图说明
图1是现有的空中运输系统的示意图;
图2A~图2C是采用图1所示的空中运输系统在机台设备上放置物料的过程示意图;
图2D~图2F为升降带的振动形式的示意图;
图3是本发明升降带的一个具体实施方式的截面结构示意图;
图4是本发明升降带的一个具体实施方式的俯视示意图;
图5是本发明升降带的另一个具体实施方式的电流变液腔的分布图;
图6是本发明升降系统的一个具体实施方式的结构框图;
图7是本发明升降系统的一个具体实施方式升降带与转轴的结构示意图;
图8是本发明升降系统的承载端上升过程的示意图
图9是本发明控制运输系统的结构示意图简图。
具体实施方式
下面结合附图对本发明提供的升降带、升降系统及空中运送系统的具体实施方式做详细说明。
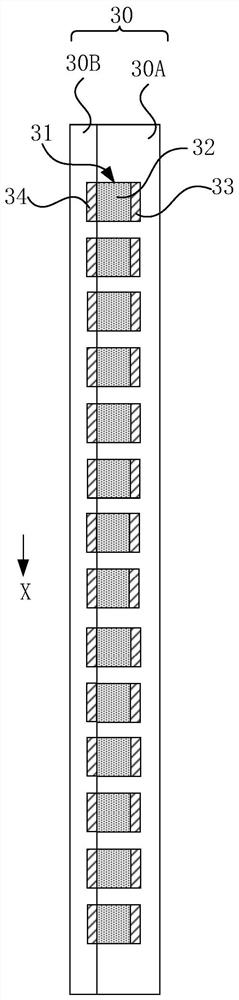
图3是本发明升降带的一个具体实施方式的截面结构示意图,图4是图3所示示意图的侧视示意图。请参阅图3及图4,所述升降带包括绝缘本体30。所述绝缘本体30沿第一方向延伸(如图3所示的X方向),所述第一方向为所述升降带升降的方向。为了清楚说明本发明的技术方案,附图中夸大了各个部件的尺寸,其并不代表各个部件的实际尺寸,而在实务中,可根据实际情况设置各个构件的尺寸。
在本具体实施方式中,所述绝缘本体30包括第一层30A及第二层30B,所述第一层30A与所述第二层30B贴合形成所述绝缘本体30。在侧视方向上,所述第一层30A及所述第二层30B被绝缘本体30遮挡,而所述第二层30B被所述第一层30A遮挡,则为了说明本发明技术方案,在图4中仅采用虚线绘示第一层30A的内部结构。在本发明其他具体实施方式中,所述绝缘本体也可以包括其他层,例如密封层,所述密封层可用于密封所述第一层及所述第二层。
多个电流变液腔31沿所述第一方向依序设置在所述绝缘本体30内,所述电流变液腔31内填充有电流变液32。在本具体实施方式中,所述第一层30A设置有多个凹槽,所述凹槽朝向所述第一层30A的内部凹陷,所述凹槽即为所述电流变液腔31,电流变液32填充在所述凹槽内。
在本具体实施方式中,所述电流变液腔31仅沿所述第一方向依序设置,而在本发明其他具体实施方式中,所述电流变液腔31还沿第二方向依序设置,所述第二方向与所述第一方向垂直。图5是本发明升降带的另一个具体实施方式的电流变液腔的分布图。请参阅图5,多个所述电流变液腔31不仅沿X方向依序排列,还沿Y方向依序排列,形成矩阵。
所述升降带还包括多个第一电极33及多个第二电极34。在每一个电流变液腔31内均设置有第一电极33及第二电极34。所述第一电极33与所述第二电极34相对设置在所述电流变液腔32的两相对内壁,且所述电流变液32与所述第一电极33及所述第二电极34接触。
在本具体实施方式中,所述第一电极33设置在所述凹槽的底部,并被所述电流变液32覆盖,即所述第一电极33设置在所述电流变液腔31的底面;所述第二电极34设置在所述第二层30B的表面,且与所述电流变液32接触,即所述第二电极34设置在所述电流变液腔31的顶部。在本发明其他具体实施方式中,所述第一电极及所述第二电极也可相对设置在所述电流变液腔的两个相对的侧面。
改变所述第一电极33及所述第二电极34的通电状态能够使所述电流变液32在液态与固态之间转换。若向某一个第一电极33及与其相对的所述第二电极34施加电压,在该第一电极33与所述第二电极34之间形成匀强电场,该匀强电场施加在与其对应的电流变液32上,所述电流变液32由液体状态转换为固体状态,则该区域的升降带强度增加;若不向所述第一电极33及所述第二电极34施加电压或者撤销施加在第一电极33及所述第二电极34上的电压,则所述电流变液恢复液体状态,所述升降带恢复柔性。
可以理解的是,所述升降带的多个第一电极33及多个第二电极34可单独控制,即可选择性地向多个第一电极33及多个第二电极34施加电压。当需要所述升降带的某一区域的强度增加,则可仅向该区域的第一电极33及第二电极34施加电压,使得该区域的电流变液由液体状态变为固体状态,进而增加该区域的升降带的强度,而其他区域的升降带则保持柔性。
所述升降带还包括设置在所述绝缘本体30内的第一连接线35及第二连接线(附图中未绘示),所述第一连接线35将所述第一电极33与外部电源(附图中未绘示)电连接,所述第二连接线将所述第二电极34与外部电源电连接。即外部电源通过第一连接线35在所述第一电极33上施加电压,通过第二连接线在所述第二电极34上施加电压。
进一步,所述升降带还包括设置在所述绝缘本体30内的第一备用连接线36及第二备用连接线(附图中未绘示)。所述第一连接线35与所述第一备用连接线36互为备份,所述第二连接线与所述第二备用连接线互为备份,在所述第一连接线35及所述第二连接线损坏时,所述第一备用连接线36将所述第一电极33与外部电源电连接,所述第二备用连接线将所述第二电极34与外部电源电连接。在本具体实施方式中,所述第一连接线35及所述第一备用连接线36分设在所述第二电极34的两侧。在本发明其他具体实施方式中,所述第一连接线35及所述第一备用连接线36也可设置在所述第二电极34的同侧。所述第二连接线36及所述第二备用连接线的位置关系也可采用上述的设置方法。
进一步,所述电流变液腔31均匀分布在所述绝缘本体30内,以进一步提高所述升降带的强度。所述电流变液腔31密度越高,其控制精度越高。
本发明还提供一种升降系统的具体实施方式。图6是本发明升降系统的一个具体实施方式的结构框图,图7是本发明升降系统的一个具体实施方式升降带与转轴的结构示意图。请参阅图6及图7,升降系统包括至少一固定转轴60、至少一升降带61、驱动装置62及控制装置63。
所述固定转轴60被固定在预设高度处。所述升降带61绕过所述转轴60而升降。所述固定转轴60能够随所述升降带61的移动而同步转动。在本具体实施方式中,所述升降带61与所述固定转轴60对应设置,即一个升降带61对应一个所述固定转轴60。所述升降带61的结构与上述的升降带的结构相同。
所述升降带61与所述固定转轴60接触而形成接触区域C。所述接触区域C具有上界线C1及下界线C2。在本具体实施方式中,所述上界线C1为所述升降带61与所述固定转轴60的上切边线,所述下界线C2为所述升降带61与所述固定转轴60的右切边线。
所述升降带61的一端为承载端61A。所述承载端61A能够与取放装置(附图中未绘示)连接,以通过所述升降带61拉动所述取放装置上升或下降。所述承载端61A能够绕过所述转轴60自第一位置A朝向第二位置B延伸。在本具体实施方式中,将所述接触区域C的下界线C2定义为所述第一位置A,将所述承载端61A需要静止的位置定义为所述第二位置B。在本发明其他具体实施方式中,也可将所述接触区域C的下界线C2下方的其他位置定义为第一位置A。
所述驱动装置62能够收放所述升降带61,以使所述承载端61A能够在所述第一位置A与所述第二位置B之间移动。若所述驱动装置62收回所述升降带61(即所述升降带61上升),则所述承载端61A上升,所述承载端61A由第二位置B向第一位置A移动;若所述驱动装置62放出所述升降带61(即所述升降带61下降),则所述承载端61A下降,所述承载端61A由第一位置A向第二位置B移动。所述驱动装置62包括但不限于电机。
所述控制装置63与所述升降带61电连接,其能够向所述升降带61位于所述第一位置A及所述第二位置B之间的区域施加电压,以使所述升降带61位于该区域的电流变液固化,进而增加升降带61在该区域的强度,从而避免位于第一位置A与第二位置B之间的升降带61发生振动。即所述升降带61被施加电场的区域为所述承载端61A与所述第一位置A所限定的区域。
图8是升降系统的所述承载端61A上升过程的示意图,请参阅图8所示,在所述承载端61A上升的过程中,位于所述第一位置A与所述第二位置B之间的所述升降带61的长度会变短。随着所述升降带61的长度的变化,所述控制装置63改变其施加电压区域,使所述升降带61被施加电场的区域仅为所述承载端61A与所述第一位置A所限定的区域(如图中阴影绘示区域),其他区域不被施加电压,从而使施加电压区域强度增加,而其他区域保持柔性。在所述承载端61A下降的过程中,位于所述第一位置A与所述第二位置B之间的所述升降带61的长度会变长。所述控制装置63会改变其施加电压区域,使所述升降带61被施加电场的区域仅为所述承载端61A与所述第一位置A所限定的区域,其他区域不被施加电压。
可见,在所述承载端61A上升或下降的过程中,位于所述第一位置A与所述第二位置B之间的升降带61均被增加强度,其能够抑制升降带61的简谐振动及纵向振动,进而能够减小与所述承载端61A连接的取放装置的振动;同时,与所述承载端61A而位于所述第一位置A与所述第二位置B形成的区域之外的升降带61保持柔性,能够便于升降带61的卷曲。
进一步,当所述承载端61A位于所述第二位置B时,所述控制装置63不仅向所述升降带61位于所述第一位置A及所述第二位置B之间的区域施加电压,也同时向所述升降带61与所述固定转轴60接触区域C施加电压,以使该两个区域的电流变液固化,以加强该两个区域的强度。在所述接触区域C,所述升降带61被施加电压的区域为上界线C1与下界线C2之间区域。请参阅图7所示,所述升降带61被施加电场的区域为接触区域C及位于所述第一位置A与所述第二位置B之间的区域(如图中阴影所绘示)。
当所述承载端61A位于第二位置B时,与所述承载端61A连接的取放装置需要取放物品,所述升降带61需要保持静止若干时间,则此时所述升降带61与所述固定转轴60接触区域C的强度被加强,所述固定转轴60可对所述升降带61起到阻挡作用,能够抑制所述升降带61的摆动振动,进而进一步避免所述取放装置振动。
进一步,所述升降系统可通过长度检测装置来检测所述升降带61伸出的长度,以便于所述控制装置63能够对相关区域施加电压。在本具体实施方式中,所述长度检测装置为编码器,所述编码器集成在所述驱动装置62中,例如,若所述驱动装置62为电机,则所述编码器为电机自带的编码器,其通过计算电机的滚轮的旋转周长来计算升降带61的长度。所述长度检测装置与所述驱动装置62及所述控制装置63电连接,将所述驱动装置62的角位移转换为电信号,并传送给所述控制装置63。所述控制装置63将所述角位移转换为升降带61的长度位移(即升降带61的伸出量),该长度位移即为所述控制装置需要施加电压的区域。
进一步,所述升降系统还包括振动检测装置65,所述振动检测装置65设置在所述升降带61上,以检测所述升降带61的振动强度及振动方向,并将信号传递给所述控制装置63,所述控制装置63用于根据该信号改变施加在所述升降带61上的电压,以实时调节电场强度。
本发明还提供一种空中运输系统。图9是本发明控制运输系统的结构示意图简图。请参阅图9,本发明空中运输系统包括台车90、卡盘91及升降系统92。所述卡盘91通过所述升降系统92的升降带921连接至所述台车90。所述台车90能够沿设置在空中的轨道移动,进而带动所述卡盘91移动,所述卡盘91能够携带被运输物移动。由于所述空中运输系统采用上述的升降系统,则所述卡盘91在上升及下降过程中不会产生振动,可以提高卡盘91抓取被运输物时定位精准度,能够适应较高升降速度,减少取放被运输物的时间。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 升降带、升降系统及空中运送系统
- 一种便于运送桥梁施工材料的升降系统及方法