一种接触网安全措施作业接地装置
文献发布时间:2023-06-19 09:32:16
技术领域
本发明涉及一种接地装置,具体涉及一种接触网安全措施作业接地装置。
背景技术
在电气化铁路牵引供电系统中,要保证铁路系统的正常运行,日常检修必不可少,在日常检修或故障抢修时,需对检修区段接触网断电,并在作业区间两端挂接地线,确保作业人员施工安全。针对牵引网多种供电方式,比如直供方式下安全措施作业需要对接触线进行挂接地线,AT供电方式安全措施作业需要对接触线和正馈线进行挂接地线。传统的挂接地线环节均是由人工完成,在变电所安全措施作业完成后,由现场工作人员先进行验电,然后在接触线、正馈线等下面用接地杆挂接或拆除地线,但人工操作存在着安全保障低、效率低、强度大等弊端,并且对于分散性大、距离长的接触网安全作业,人工操作方法已不能满足高效、安全的作业要求。
发明内容
针对现有技术的不足,本发明提供了一种接触网安全措施作业接地装置,可以使用电动控制或手动控制完成接地线的挂拆作业,并具备智能接口,可通过自动化云平台,实现对接地装置的远程监控,有效解决人工挂拆地线作业带来的弊端,提供工作效率,作业更安全。
为实现上述技术方案,本发明提供了一种接触网安全措施作业接地装置,包括:沿接触网支柱竖直方向安装在支柱上的伸缩顶杆,所述伸缩顶杆的底部安装有驱动装置,接触线腕臂接地接触臂安装在支柱顶部,所述接触线腕臂接地接触臂的一端铰接在伸缩顶杆上,接触线腕臂接地接触臂的另外一端沿支柱竖直方向立于接触线的两腕臂之间,并与腕臂无接触,正馈线接地接触臂安装在支柱顶部且与接触线腕臂接地接触臂相对设置,所述正馈线接地接触臂的一端铰接在伸缩顶杆的顶部,正馈线接地接触臂的另外一端悬空在安装在正馈线上夹套的上方,所述正馈线接地接触臂的中部通过底座固定在正馈线肩架上,正馈线夹套安装在正馈线上与正馈线接地接触臂的接触部位。
上述技术方案中,实际工作时,当接触网检修安全措施接地作业时,通过人工控制驱动装置驱动伸缩顶杆的向上运动,与伸缩顶杆连接的接触线腕臂接地接触臂和正馈线接地接触臂在杠杆作用下而向下运动,此时接触线腕臂接地接触臂与接触线腕臂接触,正馈线接地接触臂与正馈线夹套接触,腕臂与接触线电连接,从而达到接触线与正馈线接地的目的,实现接触线与正馈线的接地措施作业。当需要拆除安全措施作业时,通过人工反向操作驱动装置驱动伸缩顶杆的向下运动,接触线腕臂接地接触臂和正馈线接地接触臂恢复至初始状态,实现接触线与正馈线的接地措施拆除作业。
优选的,所述接触线腕臂接地接触臂包括接触线腕臂接地接触臂摇臂、接触线腕臂接地接触臂底座、接触线腕臂接地接触臂弹簧铰链、接触线腕臂接地接触臂自动恢复弹簧、接触线腕臂接地接触臂绝缘杆、接触线腕臂接地接触臂触头和转轴,其中接触线腕臂接地接触臂底座上设置有支耳,接触线腕臂接地接触臂绝缘杆的底部通过转轴固定在接触线腕臂接地接触臂底座的支耳上,接触线腕臂接地接触臂摇臂的一端铰接在伸缩顶杆上,接触线腕臂接地接触臂摇臂的另外一端通过接触线腕臂接地接触臂弹簧铰链与转轴的一端铰接,接触线腕臂接地接触臂自动恢复弹簧安装在转轴上与接触线腕臂接地接触臂弹簧铰链相对的一端,接触线腕臂接地接触臂触头安装在接触线腕臂接地接触臂绝缘杆的顶部。实际工作时,接触线腕臂接地接触臂底座通过角箍固定在支柱上,接触线腕臂接地接触臂弹簧铰链将接触线腕臂接地接触臂绝缘杆和接触线腕臂接地接触臂摇臂的转轴进行连接,并为接触线腕臂接地接触臂摇臂提供压紧力,接触线腕臂接地接触臂自动恢复弹簧在接触线腕臂接地接触臂触头与腕臂做连接动作时,承受反向力,接触线腕臂接地接触臂触头与腕臂断开连接时可以通过弹簧预扭力保证接触线腕臂接地接触臂触头能够快速与腕臂分离恢复到初始状态。
优选的,所述接触线腕臂接地接触臂触头铰接在接触线腕臂接地接触臂绝缘杆的顶部并保留±7.5°范围内的自由活动裕量,避免由于安装工艺不同造成的接触不完全等影响,有效保证接触面积。接触线腕臂接地接触臂绝缘杆可使接触线腕臂接地接触臂触头与接触线腕臂接地接触臂摇臂机构有效绝缘隔离,保证操作人员安全。
优选的,所述接触线腕臂接地接触臂触头内嵌有磁铁,接触线腕臂接地接触臂触头与腕臂接触时,通过磁铁可以更好的与腕臂可靠接触。
优选的,所述正馈线接地接触臂包括正馈线接地接触臂摇臂、正馈线接地接触臂底座、正馈线接地接触臂自动恢复弹簧、正馈线接地接触臂绝缘杆和正馈线接地接触臂触头,其中正馈线接地接触臂摇臂的一端铰接在伸缩顶杆的顶部,正馈线接地接触臂底座固定安装在正馈线肩架上,正馈线接地接触臂底座与正馈线接地接触臂摇臂之间通过自动恢复弹簧连接,正馈线接地接触臂绝缘杆套接在正馈线摇臂上,正馈线接地接触臂触头铰接在正馈线接地接触臂绝缘杆的前端,所述正馈线接地接触臂触头具有±7.5°范围内的自由活动裕量,正馈线接地接触臂触头悬空在正馈线的上方,正馈线上装有为与正馈线接地接触臂良好接触部位的夹套。实际工作过程中,正馈线接地接触臂自动恢复弹簧在正馈线接地接触臂触头与正馈线做连接动作时,承受反向力,正馈线接地接触臂触头与正馈线断开连接时可以通过弹簧预扭力保证正馈线接地接触臂触头能够快速与正馈线夹套分离恢复到初始状态,另外可以确保在接触网正常运行时,不受外力因素影响导致装置误动作,保证安全可靠性。正馈线接地接触臂绝缘杆可使正馈线接地接触臂触头与正馈线接地接触臂摇臂机构有效绝缘隔离,保证操作人员安全;正馈线接地接触臂触头具有±7.5°范围内自由活动裕量,避免由于安装工艺不同造成的接触不完全等影响,有效保证接触面积。
优选的,所述正馈线接地接触臂触头内嵌有磁铁,正馈线接地接触臂触头与正馈线夹套接触时,通过磁铁可以更好的与正馈线夹套可靠接触。
优选的,所述伸缩顶杆包括第一顶杆接头、第二顶杆接头、限位接触环弹簧、限位接触环、角箍、第三顶杆接头和顶杆本体,所述第一顶杆接头安装在顶杆本体的顶部并与正馈线接地接触臂铰接,所述第二顶杆接头安装在顶杆本体的上半部并位于第一顶杆接头的下方,所述第二顶杆接头与接触线腕臂接地接触臂铰接,所述顶杆本体通过角箍固定在支柱上,限位接触环弹簧和限位接触环分别套接在顶杆本体上,第三顶杆接头安装在顶杆本体的底部并与驱动装置连接。实际工作过程中,通过伸缩顶杆的上下运动驱动控制接触线腕臂接地接触臂和正馈线接地接触臂动作,进而实现接触网安全作业接地措施的实行或者拆除,限位接触环用于限制伸缩顶杆的上下行程范围,并可以作为到位信号反馈给电控单元。限位接触环弹簧为保证接触臂完全到位或恢复,上下行程留有一定缓冲裕量。
优选的,所述驱动装置包括蜗轮蜗杆、手柄和直流电机,其中蜗轮蜗杆与伸缩顶杆底部的第三顶杆接头对接,直流电机安装在蜗轮蜗杆上,手柄通过转轴与蜗轮蜗杆连接。通过直流电机可以自动控制蜗轮蜗杆的转动进而控制伸缩顶杆的升降,也可以通过手柄手动调节蜗轮蜗杆的转动,进而手动控制伸缩顶杆的升降。
本发明提供的有益效果在于:
1)本接触网安全措施作业接地装置结构简单,设计合理,自动化程度高,操作方便,实际工作时,当接触网检修安全措施接地作业时,通过人工控制驱动装置驱动伸缩顶杆的向上运动,与伸缩顶杆连接的接触线腕臂接地接触臂和正馈线接地接触臂在杠杆作用下而向下运动,此时接触线腕臂接地接触臂与接触线的腕臂接触,正馈线接地接触臂与正馈线夹套接触,腕臂与接触线电连接,从而达到接触线与正馈线接地的目的,实现接触线与正馈线的接地措施作业。当需要拆除安全措施作业时,通过人工反向操作驱动装置驱动伸缩顶杆的向下运动,接触线腕臂接地接触臂和正馈线接地接触臂恢复至初始状态,实现接触线腕臂与正馈线的接地措施拆除作业。
2)本接触网安全措施作业接地装置可以使用电动控制或手动控制完成接地线的挂拆作业,并具备智能接口,可通过自动化云平台,实现对接地装置的远程监控,有效解决人工挂拆地线作业带来的弊端,提供工作效率,作业更安全。
3)本接触网安全措施作业接地装置可以兼容多种供电方式的接触网安全措施作业,实用性强;具有电动控制和手动操作机构,提高了可靠性和工作效率,电动控制单元预留智能接口,方便接入自动化云平台。
附图说明
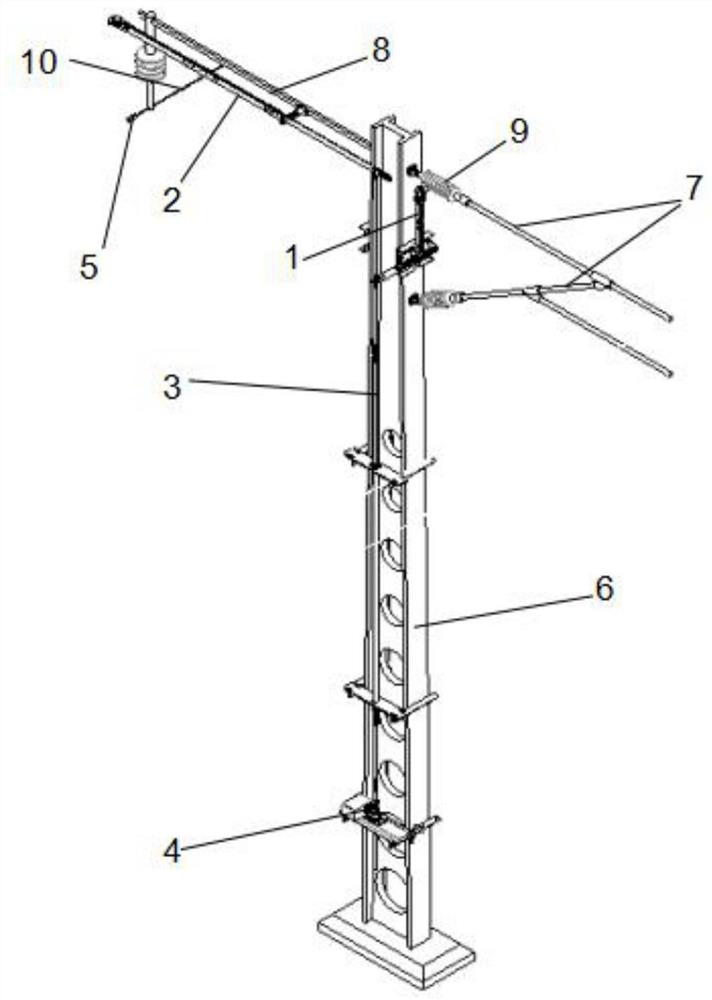
图1为本发明中接地装置初始状态或接地拆除状态位置时的结构示意图。
图2为本发明中接地装置地线作业挂接后的结构示意图。
图3为本发明中接触线腕臂接地接触臂的结构示意图。
图4为本发明中正馈线接地接触臂的结构示意图。
图5为本发明中伸缩顶杆的结构示意图。
图6为本发明中伸缩顶杆的局部结构放大示意图。
图7为本发明中驱动装置的结构示意图。
图中:1、接触线腕臂接地接触臂;11、接触线腕臂接地接触臂摇臂;12、接触线腕臂接地接触臂底座;13、接触线腕臂接地接触臂弹簧铰链;14、接触线腕臂接地接触臂自动恢复弹簧;15、接触线腕臂接地接触臂绝缘杆;16、接触线腕臂接地接触臂触头;17、转轴;2、正馈线接地接触臂;21、正馈线接地接触臂摇臂;22、正馈线接地接触臂底座;23、正馈线接地接触臂自动恢复弹簧;24、正馈线接地接触臂绝缘杆;25、正馈线接地接触臂触头;3、伸缩顶杆;31、第一顶杆接头;32、第二顶杆接头;33、限位接触环弹簧;34、限位接触环;35、角箍;36、第三顶杆接头;37、顶杆本体;4、驱动装置;41、蜗轮蜗杆驱动机构;42、手柄;43、直流电机;5、正馈线夹套;6、支柱;7、腕臂;8、正馈线肩架;9、绝缘子串;10、正馈线。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。本领域普通人员在没有做出创造性劳动前提下所获得的所有其他实施例,均属于本发明的保护范围。
实施例:一种接触网安全措施作业接地装置。
参照图1至图7所示,接触线和正馈线10分别通过腕臂7和正馈线肩架8等支持装置架设在支柱6顶部,本接触网安全措施作业接地装置,包括:沿支柱6的竖直方向安装在支柱6上的伸缩顶杆3,正馈线10上安装有为方便正馈线接地装置良好接触的正馈线夹套5,伸缩顶杆3的底部安装有驱动装置4,所述支柱6顶部安装有接触线腕臂接地接触臂1,所述接触线腕臂接地接触臂1的一端铰接在伸缩顶杆3上,初始状态,接触线腕臂接地接触臂1沿支柱6竖直方向向上竖立接触线两腕臂7之间,并与腕臂7无接触,正馈线接地接触臂2安装在支柱6顶部且与接触线腕臂接地接触臂1相对设置,正馈线接地接触臂2的一端铰接在伸缩顶杆3的顶部,初始状态下,正馈线接地接触臂2的另外一端悬空在正馈线10的上方。实际工作时,当接触网检修安全措施接地作业时,通过人工控制驱动装置4驱动伸缩顶杆3的向上运动,与伸缩顶杆3连接的接触线腕臂接地接触臂1和正馈线接地接触臂2在杠杆作用下而向下运动,此时接触线腕臂接地接触臂1与腕臂7接触,正馈线接地接触臂2与正馈线夹套5接触,腕臂与接触线电连接,从而达到接触线与正馈线接地的目的,实现接触线与正馈线的接地措施作业。当需要拆除安全措施作业时,通过人工反向操作驱动装置4驱动伸缩顶杆3的向下运动,接触线腕臂接地接触臂1和正馈线接地接触臂2恢复至初始状态,实现接触线与正馈线的接地措施拆除作业。
参照图2和图3所示,接触线腕臂接地接触臂1包括接触线腕臂接地接触臂摇臂11、接触线腕臂接地接触臂底座12、接触线腕臂接地接触臂弹簧铰链13、接触线腕臂接地接触臂自动恢复弹簧14、接触线腕臂接地接触臂绝缘杆15、接触线腕臂接地接触臂触头16和转轴17,其中接触线腕臂接地接触臂底座12上设置有支耳,接触线腕臂接地接触臂绝缘杆15的底部通过转轴17固定在接触线腕臂接地接触臂底座12的支耳上,接触线腕臂接地接触臂摇臂11的一端铰接在伸缩顶杆3上,接触线腕臂接地接触臂摇臂11的另外一端通过接触线腕臂接地接触臂弹簧铰链13与转轴17的一端铰接,接触线腕臂接地接触臂自动恢复弹簧14安装在转轴17上与接触线腕臂接地接触臂弹簧铰链13相对的一端,接触线腕臂接地接触臂触头16安装在接触线腕臂接地接触臂绝缘杆15的顶部。实际工作时,接触线腕臂接地接触臂底座12通过角箍固定在支柱6上,接触线腕臂接地接触臂弹簧铰链13将接触线腕臂接地接触臂绝缘杆15和接触线腕臂接地接触臂摇臂11的转轴17进行连接,并为接触线腕臂接地接触臂摇臂11提供压紧力,接触线腕臂接地接触臂自动恢复弹簧14在接触线腕臂接地接触臂触头16与腕臂7做连接动作时,承受反向力,接触线腕臂接地接触臂触头16与腕臂7断开连接时可以通过弹簧预扭力保证接触线腕臂接地接触臂触头16能够快速与腕臂7分离恢复到初始状态。所述接触线腕臂接地接触臂触头16铰接在接触线绝缘杆15的顶部并保留±7.5°范围内的自由活动裕量,避免由于安装工艺不同造成的接触不完全等影响,有效保证接触面积。接触线腕臂接地接触臂绝缘杆可使接触线腕臂接地接触臂触头与接触线腕臂接地接触臂摇臂机构有效绝缘隔离,保证操作人员安全。并且所述接触线腕臂接地接触臂触头16内嵌有磁铁,接触线腕臂接地接触臂触头16与腕臂7接触时,通过磁铁可以更好的与腕臂7可靠接触。
参照图2和图4所示,正馈线接地接触臂2包括正馈线接地接触臂摇臂21、正馈线接地接触臂底座22、正馈线接地接触臂自动恢复弹簧23、正馈线接地接触臂绝缘杆24和正馈线接地接触臂触头25,其中正馈线接地接触臂摇臂21的一端铰接在伸缩顶杆3的顶部,正馈线接地接触臂底座22固定安装在正馈线肩架8上,正馈线接地接触臂底座22与正馈线接地接触臂摇臂21之间通过正馈线接地接触臂自动恢复弹簧23连接,正馈线接地接触臂绝缘杆24套接在正馈线接地接触臂摇臂21上,正馈线接地接触臂触头25铰接在正馈线接地接触臂绝缘杆24的前端,所述正馈线接地接触臂触头25具有±7.5°范围内的自由活动裕量,正馈线接地接触臂触头25悬空在正馈线的上方,正馈线上装有为与正馈线接地接触臂良好接触部位的正馈线夹套5。实际工作过程中,正馈线接地接触臂自动恢复弹簧23在正馈线接地接触臂触头25与正馈线做连接动作时,承受反向力,正馈线接地接触臂触头25与正馈线夹套5断开连接时可以通过弹簧预扭力保证正馈线接地接触臂触头25能够快速与正馈线夹套5分离恢复到初始状态,另外可以确保在接触网正常运行时,不受外力因素影响导致装置误动作,保证安全可靠性。正馈线接地接触臂绝缘杆24可使正馈线接地接触臂触头25与正馈线接地接触臂摇臂21机构有效绝缘隔离,保证操作人员安全;正馈线接地接触臂触头25具有±7.5°范围内自由活动裕量,避免由于安装工艺不同造成的接触不完全等影响,有效保证接触面积。正馈线接地接触臂触头25内嵌有磁铁,正馈线接地接触臂触头25与正馈线10接触时,通过磁铁可以更好的与正馈线夹套5可靠接触。
参照图1、图2、图5和图6所示,伸缩顶杆3包括第一顶杆接头31、第二顶杆接头32、限位接触环弹簧33、限位接触环34、角箍35、第三顶杆接头36和顶杆本体37,所述第一顶杆接头31安装在顶杆本体37的顶部并与正馈线接地接触臂2铰接,所述第二顶杆接头32安装在顶杆本体37的上半部并位于第一顶杆接头31的下方,所述第二顶杆接头32与接触线腕臂接地接触臂1铰接,所述顶杆本体37通过角箍35固定在支柱6上,限位接触环弹簧33和限位接触环34分别套接在顶杆本体37上,第三顶杆接头36安装在顶杆本体37的底部并与驱动装置4连接。实际工作过程中,通过伸缩顶杆3的上下运动驱动控制接触线腕臂接地接触臂1和正馈线接地接触臂2的运动,进而控制系统接地措施的实行或者拆除,限位接触环34用于限制伸缩顶杆3的上下行程范围,并可以作为到位信号反馈给电控单元。限位接触环弹簧33为保证接触臂完全到位或恢复,上下行程留有一定缓冲裕量。
参照图7所示,所述驱动装置4包括蜗轮蜗杆41、手柄42和直流电机43,其中蜗轮蜗杆41与伸缩顶杆3底部的第三顶杆接头36对接,直流电机43安装在蜗轮蜗杆41上,手柄42通过转轴与蜗轮蜗杆41连接。通过直流电机43可以自动控制蜗轮蜗杆41的转动进而控制伸缩顶杆3的升降,也可以通过手柄42手动调节蜗轮蜗杆41的转动,进而手动控制伸缩顶杆3的升降。
本发明的具体工作原理如下:
接触网检修安全措施接地作业时,通过人工操作驱动装置4中的手柄42或电动控制直流电机43驱动蜗轮蜗杆41转动,从而实现控制伸缩顶杆3的向上运动,与伸缩顶杆3连接的接触线腕臂接地接触臂1和正馈线接地接触臂2随伸缩顶杆3的上顶而向下运动,此时接触线腕臂接地接触臂1与接触线腕臂7接触,正馈线接地接触臂2与正馈线夹套5接触,腕臂7与接触线电连接,从而达到接触线与正馈线接地的目的,此时系统处于安全作业状态,人工停止操作,或由限位接触环34反馈到位接点信号至电动控制机构,使直流电机43停止工作,实现接触线与正馈线接地措施作业。
拆除安全措施作业:通过人工反向操作驱动装置4中的手柄42或电动控制直流电机43驱动蜗轮蜗杆41转动,从而实现控制伸缩顶杆3的向下运动,接触线腕臂接地接触臂1和正馈线接地接触臂2恢复至初始状态,人工停止操作,或由限位接触环34反馈到位接点信号至电动控制机构,使直流电机43停止工作,实现接触线与正馈线的接地措施拆除作业。
执行机构关节处均安装有自动恢复弹簧机构,避免在接触网正常运行时受其它外力影响如鸟类踏踩造成接地误动作,同时保证执行机构恢复作业时有足够的作用力使接触臂可靠返回。
本接触网安全措施作业接地装置结构简单,设计合理,自动化程度高,操作方便,可以使用电动控制或手动控制完成接地线的挂拆作业,并具备智能接口,可通过自动化云平台,实现对接地装置的远程监控,有效解决人工挂拆地线作业带来的弊端,提供工作效率,作业更安全。
本接触网安全措施作业接地装置可以兼容多种供电方式的接触网安全措施作业,实用性强;具有电动控制和手动操作机构,提高了可靠性和工作效率,电动控制单元预留智能接口,方便接入自动化云平台。
以上所述为本发明的较佳实施例而已,但本发明不应局限于该实施例和附图所公开的内容,所以凡是不脱离本发明所公开的精神下完成的等效或修改,都落入本发明保护的范围。
- 一种接触网安全措施作业接地装置
- 一种接触网安全措施作业接地装置