一种基于DMD方法的流动分离控制系统及方法
文献发布时间:2023-06-19 09:32:16
技术领域
本发明涉及流动分离控制技术领域,具体涉及一种基于DMD方法的流动分离控制系统及方法。
背景技术
流动分离是一种常见的流动状态,例如飞机机翼的附面层分离、汽车外表面的流动分离、发动机叶片表面的流动分离等,一般流动发生分离之后会造成一定的负面影响,如机翼的升力减小、汽车阻力增加、发动机效率减小等。常见的流动分离控制方法是设置扰流装置或是抽吸气,这些方法往往基于前期大量的试验或经验,设置固定的流动分离控制参数,如固定大小的扰流装置、固定的抽吸气量等,在不同的场景及工况下,流动控制效果可能不够理想。
而DMD(Dynamic Mode Decomposition,动模态分解)方法是将全流场的参数投影到频域中,着眼于频域内扰动的增长或是衰减过程,其用来分析流体流动的稳定性问题与流动本身的稳定性理论有着很好的相似性,对于同一个流场信息序列,如果将其看成空间结构随着时间发展的序列,那么这就是时间DMD方法分析;如果将其看成是空间结构沿流向发展的序列,那么这就是空间DMD分析,即DMD方法分析是一个流场区域的全局稳定性分析方法,可以避免单点分析造成在流场分离区外判定全流场是稳定(无分离流动)的局部误判,因此,可将其应用于流动分离流场的稳定性控制技术中。
发明内容
有鉴于此,本发明提供了一种基于DMD方法的流动分离控制系统及方法,根据流场的实时测量结果,能够通过DMD方法识别出失稳频率,进而实时调整执行模块的控制强度,从而形成闭环的流动分离控制,直至流动分离得到控制。
本发明的技术方案为:一种基于DMD方法的流动分离控制系统,包括:依次相连的控制模块、计算模块和测量模块;
所述执行模块设置在被控流场中,用于执行流动分离控制;测量模块沿流动方向设置在执行模块之后的被控流场中,用于实时测量被控流场的流场信息,并反馈给计算模块;计算模块基于DMD方法,对流场信息进行实时分析处理,并调节执行模块对应控制措施的强度。
优选地,所述执行模块的控制措施为:吹气或振动或设置可变型线扰流装置进行扰流。
优选地,所述可变型线扰流装置为扰流肋板。
一种基于DMD方法的流动分离控制方法,包括以下步骤:
第一步:计算基准流场的基准失稳频率f
第二步:向执行模块输出控制指令,执行模块根据控制指令采取相应的控制措施对被控流场进行控制;
第三步:计算执行模块施加控制措施后流场的失稳频率f;
第四步:当f>f
第五步:重复第二步至第四步,直到计算模块计算得出的流场特征值λ=1,则流场处于稳定状态,流动分离得到控制。
优选地,所述基准流场指执行模块未采取控制措施的流场。
优选地,所述DMD方法的分析过程包括:
将流场信息按照以下方式进行分解重构:
X=Φα
其中,X为测量得到的流场信息;α
令
AX=Y
对X进行奇异值分解:
X=UΣV
其中,U是N×N阶酉矩阵,Σ是半正定N×n阶对角矩阵,V
令
根据公式能够得知,通过变换矩阵U能够对矩阵A进行降阶,从而用低维矩阵代替高维矩阵;
计算矩阵
由式能够得知,λ为A的特征值,对应的特征向量为:Uw,此外A对应于λ的特征向量还能够表示为:
特征值λ中包含k个特征值元素,模大于1的特征值元素对应的基函数Φ的模态随着模的增加而增加,而模小于1的特征值元素对应的基函数Φ的模态随着模的增加逐渐衰减;这些特征值元素表征了基函数Φ的动态模态稳定性:
通过log(λ)/Δt=σ+iω将这些特征值元素映射到复变量平面上,其中,实部σ代表基函数Φ的动态模态的增长率或衰减率,虚部ω包含时间信息;
利用A的特征值λ构造范特蒙德矩阵,
基准流场信息矩阵X能够利用下式进行重构:
其中,基函数
由此可得ω
有益效果:
1、本发明的控制系统简单便携,适用于应用到不同的对象上,飞机的机翼、汽车尾翼、航空发动机叶片等。
2、本发明的执行模块采用在发生分离的被控流场中布置扰流肋板,结构形式简单,便于控制。
3、本发明的控制方法能够利用DMD方法实时识别出失稳频率,从而调整执行模块,形成一种闭环的流动分离控制方法,这种控制方法克服了传统的流动分离控制方法无法根据流场实时反馈进行实时调节控制参数的弊端,同时可以适应不同应用对象和工况;此外,因为DMD方法是一个流场区域的全局稳定性分析方法,可以避免单点分析造成在流场分离区外判定全流场是稳定的局部误判。
附图说明
图1为本发明流动分离控制系统的原理图。
图2为本发明流动分离控制系统的控制效果图。
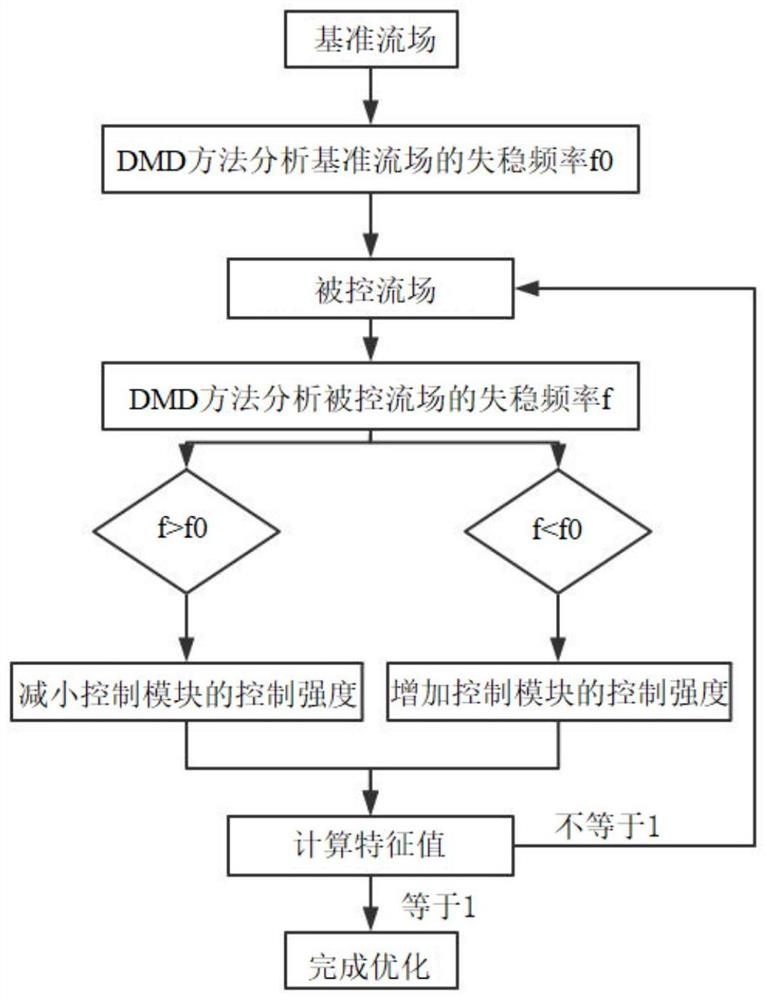
图3为本发明流动分离控制方法的流程图。
其中,1-执行模块、2-计算模块、3-测量模块。
具体实施方式
下面结合附图并举实施例,对本发明进行详细描述。
本实施例提供了一种基于DMD方法的流动分离控制系统及方法,根据流场的实时测量结果,能够通过DMD方法识别出失稳频率,进而实时调整执行模块的控制强度,从而形成闭环的流动分离控制,直至流动分离得到控制。
如图1所示,该控制系统包括:执行模块1、计算模块2和测量模块3。
该控制系统的连接关系为:执行模块1、计算模块2和测量模块3依次相连,其中,执行模块1设置在被控流场(发生分离的流动)中,用于执行流动分离控制;测量模块3设置在执行模块1之后的被控流场中(本实施例中前方为流体的来流方向,后方为其相对方向,流体从前向后流动),用于实时测量被控流场的流场信息,并反馈给计算模块2;计算模块2基于DMD方法,对流场信息进行实时分析处理,并调节执行模块1对应控制措施的控制强度;
其中,流场信息指流场的空间结构信息和时间信息;执行模块1的控制措施可以采用不同形式的流动分离控制机构进行流动分离控制,例如:吹气、振动、设置可变型线扰流装置(如扰流肋板)进行扰流等;
如图2所示,黑色区域为主流区域,白色区域为流动分离区域,通过三次调整扰流肋板的高度,流场的流动分离区域逐渐减小,可以看出设置控制系统对流场的控制效果较好。
如图3所示,该控制方法为:
第一步:计算基准流场的基准失稳频率f
测量模块3采集基准流场的流场信息,并将采集到的流场信息传输给计算模块2,计算模块2利用DMD方法分析出基准流场的基准失稳频率f
其中,基准流场指执行模块1未采取控制措施的流场;
第二步:向执行模块1输出控制指令,执行模块1根据控制指令采取相应的控制措施对被控流场进行控制;
第三步:计算执行模块1施加控制措施后流场的失稳频率f;
测量模块3继续采集执行模块1施加控制措施后的流场信息,并将采集到的流场信息传输给计算模块2,计算模块2利用DMD方法分析出控制后流场的失稳频率f;
第四步:当f>f
第五步:重复第二步至第四步,直到计算模块2计算得出的流场特征值λ=1,则流场处于稳定状态,流动分离得到控制。
进一步地,DMD方法的分析过程包括:
将流场信息(一个流场序列集合,包含流场的空间结构信息和时间信息)按照以下方式进行分解重构:
X=Φα
其中,X为测量得到的流场信息;α
令
AX=Y (3)
对X进行奇异值分解:
X=UΣV
其中,U是N×N阶酉矩阵,Σ是半正定N×n阶对角矩阵,V
令
根据公式(5)可知,通过变换矩阵U能够对矩阵A进行降阶,从而用低维矩阵近似高维矩阵;
计算矩阵
由式(6)可知,λ为A的特征值,对应的特征向量为:Uw,此外A对应于λ的特征向量还可表示为:
特征值λ中包含k个特征值元素λ
通过log(λ)/Δt=σ+iω将这些特征值元素映射到复变量平面上,其中,实部σ代表基函数Φ的动态模态的增长率或者衰减率,虚部ω包含了时间信息(包含频率和相位信息);
利用A的特征值λ构造范特蒙德矩阵,
基准流场信息矩阵X可以利用下式进行重构:
其中,基函数
由此可得ω
进一步地,流场信息可以是PIV测量的流场速度信息,也可以是壁面压力整列传感器测量的压力场信息,或是热膜测量的剪切力,或是热线测量的速度。
进一步地,计算模块2包含测量结果存储、处理和信号输出三部分,利用2s以上的流场测量结果及DMD方法进行计算,计算之后输出控制指令,执行模块1进行相应调节控制,因此该方法可以做到2s之内响应。
进一步地,执行模块1、计算模块2和测量模块3可以分开单独设置,也可以将三个模块集成为一个整体;应用对象可以是飞机的机翼、汽车尾翼、航空发动机叶片等。
综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种基于DMD方法的流动分离控制系统及方法
- 一种基于非线性自适应观测器的无人机纵向飞行控制系统故障检测与分离方法