一种航路规划方法
文献发布时间:2023-06-19 09:32:16
技术领域
本发明属于无人机航路规划技术领域,具体涉及一种航路规划方法。
背景技术
无人机航路规划是在特定约束条件下,寻找满足无人机性能指标的最优或可行的航路,无人机航路规划技术是实现无人机智能导航和安全飞行的技术保障。飞机航路规划是新一代低空突防技术,是提高飞机的作战效能,实施远程精确打击的有效手段,它可以大大提高飞机的生存能力和任务的成功率,已成为飞机低空突防系统必不可少的组成部分。
航路规划的功能、性能直接影响到无人机整体的性能指标和飞行的安全,所以在地面需对航路规划系统进行全面充分的试验验证,而半物理仿真测试是系统试验验证的核心组成部分,需要一种半物理仿真技术来保证无人机的各项性能指标满足技术要求。
发明内容
本发明的目的是提供一种航路规划方法,提出了一种半物理仿真测试方法,仿真的重点在于检验控制系统的正确性和可实现性,满足无人机的各项性能指标试验的技术要求,减少飞行过程中的不确定因素,提高测试效率,降低飞行风险。
本发明所采用的技术方案是,一种航路规划方法,具体包括以下步骤:
步骤1,实现动态数据可视化的地图模块;
步骤2,以excel表格的形式编辑、修改航线信息,制作航路模型;也可通过鼠标在地图上画点和线绘制航线进而生成航路模型;
步骤3,将经步骤2制作的航路模型进行管理;
步骤4,选择需要装订的航线模型,发送到三维态势软件,无人机按照装订的程序飞行。
本发明的特点还在于:
其中步骤1中实现动态数据可视化的地图模块具体包括:首先,选择地图层,其中地图层包括卫星影像、矢量地图、交通图和地形图,然后控制地图的显示范围,在地图上显示无人机的参数信息和所在的环境信息,最后展示无人机的定位信息;
其中调用Cesium地图步骤中还包括量算过程,通过量算在地图上获取点的坐标,然后通过点的坐标在地图上设置无人机飞行所需要的各种航路模型;
其中步骤2中,制作航路模型包括设置航点的位置、航线号、航偏角、俯仰角、滚转角、速度、队伍、航点号和航线号,其中,航点的经纬度是由地图采点的方式获取;
其中步骤3中,航路的管理包括:
新建航线文件:将回执好的航路保存在所创建的航线文件中;
导入航路:将创建的航路文件导入至工程中;
导出航路:将导入工程中的航路文件下载到本地;
删除航路:将导出的航路文件进行筛选,将工程中的多余航路文件进行删除;
重命名航路:将删除后剩余的航路文件进行重命名;
显示航线:选择工程中的航路文件,将文件中的航路数据通过航线的方式在地图上显示出来;
复制粘贴航线:需要多条飞行数据时,可对航路进行复制并粘贴,创造大量航线数据;
其中步骤3中,绘制航线具体包括:调用目标地区的数字地图,然后设置航线中的航点,对航点进行拖拽、添加、删除的操作,进而生成一条新的航线,也可在打开航路文件,通过Jexcel编辑单个航点的信息,在航线规划的过程中将自动进行航线高度合法性的检测,当无人机因规划航点的高度太低而可能导致危险时,航迹控制将给出警告提示并给出相应的修改意见;
其中步骤4中,航路装订模块是将所选航路模型进行装订完成后,将模型数据发往三维态势,控制无人机的航路飞行轨迹。
本发明的有益效果是本发明的方法中可在地图上通过手动录入航路信息制作航路模型也可通过在地图上选点画线制作航路模型,其使用简单、可操作性强,提出的航路规划方法可减少无人机在飞行过程中的不确定因素,提高测试效率,降低飞行风险。
附图说明
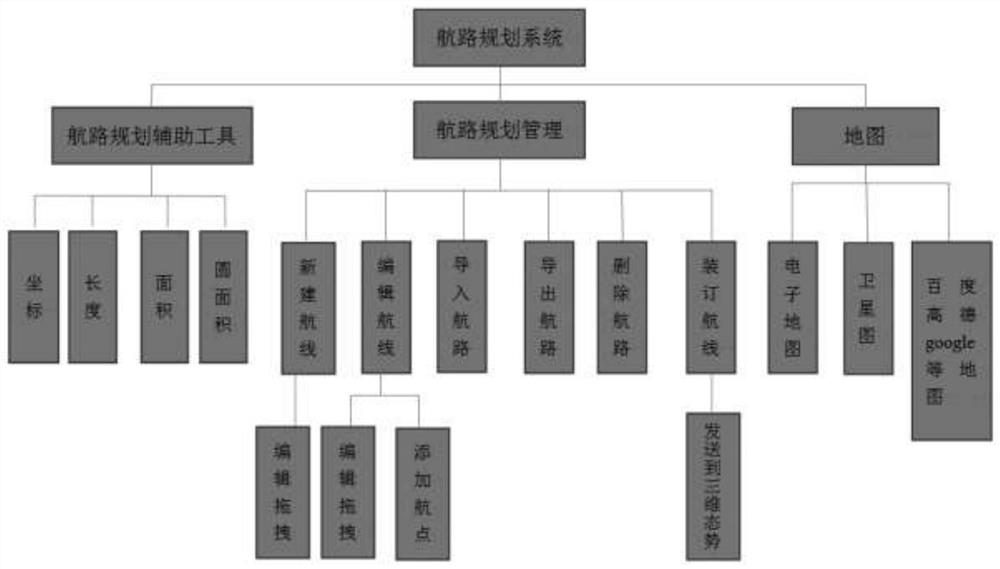
图1是本发明的一种航路规划方法中航路规划软件的基本构架图。
具体实施方式
下面结合附图和具体实施方式对本发明进行详细说明。
本发明提供了一种航路规划方法,如图1所示,具体包括以下步骤:
步骤1,实现动态数据可视化的地图模块;
该地图支持2D、3D、5D形式的地图显示,解析2D地图各种不同服务类型的数据源,包括,百度地图、天地图、BingMap、arcgis地图等等,解析地形图加载,包括加载以及3Dtitles切片形式加载展示;
所述地图模块的可操作性强,兼容性高,使用方便,用户可根据实际情况选择地图层,其中地图层包括卫星影像、矢量地图、交通图、地形图;支持在线或离线地图加载;支持下载离线地图数据,同时可选范围、级别、类别以及显示下载进度;显示地图比例尺控制地图的显示范围;可实现无人机图标的显示,并且跟随显示的关键信息和可配置信息项,可显示归航点、起降点、起降场气象信息、临时航点、目标点、任务航点等航路信息,该地图模块还可显示航迹、电子围栏等,更加直观的展示数据;除此之外,地图模块具有辅助操作,主要包括定位无人机、定位归航点、定位起飞点、定位临时航点、定位目标点、清空航迹、地图缩放、测距测向尺等功能,测距测向尺是指相对上一个航点的航段距离和相对上一航段的角度、总航程、显示各航段的方位角;
实现地图浏览技术,即对地图当前范围内的各类操作,包括地图的平移,地图的放大,地图的缩小,拉框放大,拉框缩小等,可通过鼠标拖动地图实现地图的平移,通过鼠标滚轮控制地图的缩放。
图层管理模块支持google地图、百度地图、高德地图、天地图等有偏移和无偏移的地图数据,支持叠加路网,可根据需求切换选择地形图,卫星图,电子地图。
为了提高软件的可应用性,开发了量算功能,该功能支持在地图上获取点的坐标,单击在地图上进行采点,显示该航点的坐标;支持长度的测量,在地图上单击进行绘制航点,双击结束绘制,显示该航线中点与点之间的距离;支持面积的测量,在地图上绘制面积图,获取该图形的面积,标明图像绘制的起点,显示点与点的距离以及总长;支持圆面积的测量,在地图上单击开始绘制,移动鼠标得到所需的圆面积,双击结束绘制,显示所绘制该图形的面积。
可在地图上设置无人机飞行所需要的各种航路;
步骤2,以excel表格的形式编辑、修改航线信息,制作航路模型;也可通过鼠标在地图上画点和线绘制航线进而生成航路模型;
步骤3,将经步骤2制作的航路模型进行管理,然后绘制航线;
实现了航路管理,此模块是对规划好的航路信息的管理和操作及下发功能,航路管理包括以下所有功能:
新建航线文件:点击新建航线,创建航路文件后调用新建航线绘图功能进行航路绘制,单击开始绘制,双击结束绘制,绘制成功后将航线保存在所创建的文件中;
导入航路:导入航路是将本地固定模板的.CSV格式的航路文件导入至工程中,可进行单个或批量文件的导入;
导出航路:点击导出航路,选择文件,可进行单个或批量的导出,将航路文件下载到本地;
删除航路:点击删除,选择文件,将不需要的文件从工程中删除;
重命名航路:点击航路文件对航路文件重命名;
显示航线:选择工程中的航路文件,点击显示,将文件中的航路数据通过航线的方式在地图上显示出来;
复制粘贴航线:需要多条飞行数据时,可对航路进行复制并粘贴,创造大量航线数据;
绘制航线模块,在新建航线模式中,调用目标地区的数字地图后,随着鼠标的移动,显示“单击测量,双击结束”的提示信息,鼠标所在的位置可以同时显示出地图上该点的经纬度信息,此时点击鼠标即将该点自动追加为航线中新的航点,同时,信息提示区中还将显示出当前的航迹控制角以及估算的无人机总航程,这样操作明显能方便操作人员,大大缩短了航线规划所需的时间。双击结束绘制后,支持通过关闭图标清除当前航线,支持清除航线清除页面的所有航线轨迹;新建航路文件时可调用绘制航线模块制作航路规划,修改工程内的航路文件时,可使用绘制航线编辑并更新文件的数据,可通过鼠标控制绘制出航线的放大、缩小,支持鼠标拖动航线控制航线的位置;
航路编辑模块是航路规划软件不可或缺的一部分,此模块支持直接在地图上编辑航线,对航点进行拖拽、添加、删除的操作,进而生成一条新的航线,也可在打开航路文件,通过Jexcel编辑单个航点的信息,此操作方便、简单;支持各航点间坡度(航迹倾斜角)自动计算;支持同时装载多条任务航线,只激活其中一条;支持多条航线同时加载显示,对默认飞行航线进行高亮标注;支持航线的切换;航线属性显示具有可编辑性;在传输航线时,标明航点的传输状态,如新编辑、已上传、已下载等;可进行批量调整,包括高度调整,为所有航点增量调整;速度调整,所有航点增量调整;半径调整,所有航点增量调整;支持撤销操作和前进操作等航线操作;实现高度检查的功能,默认参考起飞点高度,和航线高度(相对高度)、地理海拔高度进行对比,给出图标分析,附加航程、航时信息;提供信息提示,包括,显示航线各段航程和总航程(m/km)、估算航线总航时、剩余航时;支持航路上传和下载状态,显示上传、下载和当前传输进度。
为了进行测绘或巡线,实现了自动生成航路的模块,该模块支持相机设置,可预设多款常用相机,选择相机后会自动识别分辨率,传感器尺寸,镜头焦距等信息,支持自定义修改;支持航测区域选择,用户可手动选点,生成矩形、多边形、圆形、三角形、椭圆形、S形等的模板;支持航线自动生成、支持航线预览;可显示飞行时间、总航程、拍摄照片数预估等信息;支持设置航测相关参数,包括,覆盖率、拍摄间距、飞行高度、航线生成角度等。
步骤4,选择需要装订的航线模型,发送到三维态势软件,无人机按照装订的程序飞行,航路装订模块是将所选航路模型进行装订,该模块支持FCC100、FCC110等通用飞控模型的航路装订,装订完成后,将模型数据发往三维态势,控制无人机的航路飞行轨迹;
飞行模拟是对海面模型、陆地模型、空中模型进行算法模拟;利用飞行模拟器进行训练,就不存在发生飞行事故的问题,降低飞行的危险性。
- 三维警示围栏制作方法、航路规划方法、飞行调整方法
- 一种无人机航路规划方法、系统及存储介质