一种基于激光追踪测量系统机械结构的理想动力学模型建立方法
文献发布时间:2023-06-19 09:33:52
技术领域
本发明涉及一种机械结构动力学模型建立方法,特别是基于激光追踪测量系统机械结构的理想情况下的动力学模型建立方法,属于精密测量领域。
背景技术
随着现代工业技术的迅速发展,对检测仪器的测量精度、测量范围、实时性、快速性等测量性能的要求越来越高。激光追踪测量系统作为快速精密测量设备的核心技术,在现代精密工业与工程测量领域中发挥着日益重要的作用。激光追踪测量系统机械结构作为系统的核心组成部分,其机械结构及相关参数间接对提高测量精度和测量分辨率提供了有效手段,通过动力学模型方程可以准确地计算出激光追踪测量系统机械结构两轴运动所需要的力矩。本发明基于专利号为201910459007.2的“一种添加了配重平衡的以标准球为反射装置的激光跟踪测量系统”为基础介绍其系统机械结构的动力学建模方法。动力学分析一直在测量机械领域占有重要地位,将机构的运动与力结合起来综合分析机械系统的性能,主要有牛顿-欧拉法、拉格朗日方程法、凯恩法和变分法。激光追踪测量系统机械结构的性能直接决定着系统的追踪性能以及测量精度,激光追踪测量系统的机械结构简化可以看做为两轴机械臂,采用拉格朗日方程法对激光追踪测量系统机械结构进行动力学建模分析,将机械结构的整体参数与追踪过程的运动与力结合起来,分析其运动与力的关系,可以为机械结构的改进以及力矩电机选型提供参考建议。因此基于激光追踪测量系统机械结构的理想动力学模型建立对激光追踪测量系统的研究具有重要意义。
为了进行激光追踪测量系统机械结构各参数对激光追踪测量系统机械结构两轴力矩及跟踪性能的影响研究,为此,有必要发明一种基于激光追踪测量系统机械结构的理想动力学模型建立方法。
发明内容
本发明的目的在于根据机械结构动力学分析原理,提出一种基于激光追踪测量系统机械结构的理想动力学模型的建立方法,对提高扭矩计算精度,改进激光追踪测量系统机械结构与提高激光追踪测量系统的追踪性能具有重要意义。
为达到以上目的,本发明采取如下技术方案予以实现:基于激光追踪测量系统的机械结构理想动力学模型建立方法,建立激光追踪测量系统机械结构的动力学数学模型,将科氏力项和离心项包含在内研究其对激光追踪测量系统机械结构的影响,最后进行运动特性对激光追踪测量系统机械结构的两个运动关节进行力矩分析的研究,包括以下步骤:
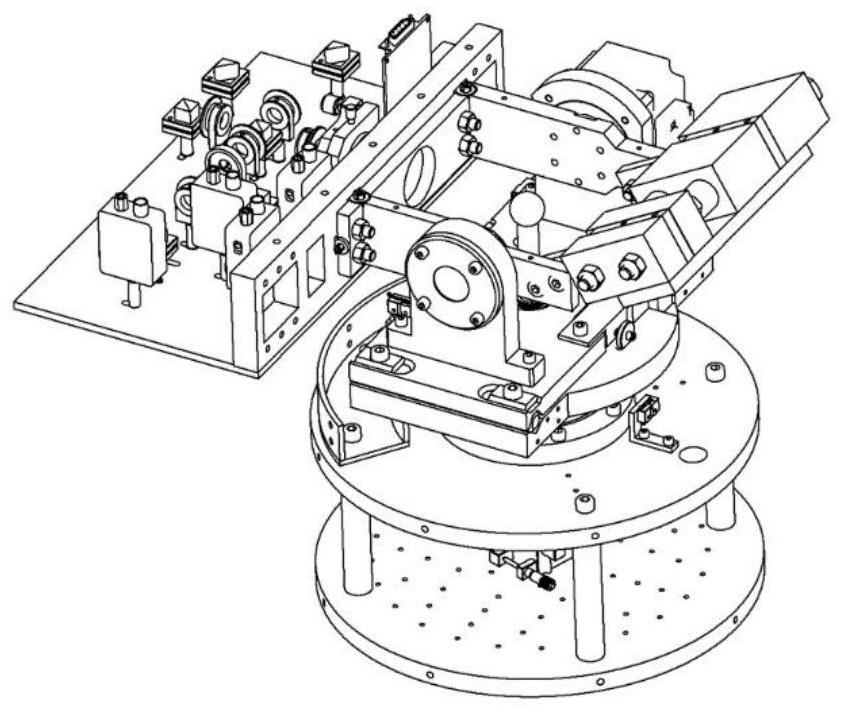
步骤一:建立激光追踪测量系统机械结构的D-H模型坐标系。如图1所示为激光追踪测量系统机械结构的三维模型图。建立如图2所示的坐标系分配示意图,坐标系整体采用的刚体质心笛卡尔坐标系和反应刚体方位的欧拉角作为广义坐标,建立三个坐标系。设底部基座中心位置为坐标原点O
表1机械结构D-H模型的坐标系分配
其中:
θ
α
a
d
步骤二:建立激光追踪测量系统机械结构D-H模型的齐次变换矩阵。根据步骤一建立的坐标系统,建立其三个坐标系之间的齐次变换矩阵,有:
其中,C
其中公式(3)又叫做该机械系统的D-H数学模型。
步骤三:基于激光追踪测量系统机械结构动力学原理应用拉格朗日方程法求解系统动能项相关系数矩阵。
对于两个轴的旋转关节i(i=1,2),可以得到:
其中,U
旋转关节i=1,2时的惯性矩矩阵为:
其中,m
那么两自由度惯性加速度相关的系统矩阵为:
科里奥利力项和离心项推导如下:
其中,h
最终得到的科里奥利力和离心项分别是:
其中两个牵引轴的惯性矩矩阵为:
其中,R为回转轴电机驱动的上部所有构件的理想回转半径;r为俯仰轴运动的俯仰旋转半径;H为底座到回转轴电机表面的距离;h为后端到俯仰轴电机轴线的距离。
步骤四:基于激光追踪测量系统机械结构动力学原理应用拉格朗日方程法求解系统势能。在应用激光追踪测量系统进行目标跟踪的过程中没有机械结构的平移运动而是只有旋转运动,该系统中的负载是俯仰轴系前端的整个光学干涉系统,为了平衡其向上和向下运动过程中受力均衡以及为了减小俯仰轴控制电机启动工作带来的偏差,进行了相应的配重设计,因此在此分析中可以忽略摩擦扭矩的影响。对系统进行实际分析的基础上,系统的动能中仅包括旋转部分,并且由于机械结构在追踪过程中没有垂直运动,因此无需考虑势能。
步骤五:基于激光追踪测量系统机械结构动力学原理拉格朗日方程法建立动力学模型。
已知两自由度机械机械结构的Lagrange-Euler动力学方程为:
上式为动力学方程封闭形式的一般结构,式中D(θ)为机械结构的惯性矩阵;
将惯性矩的值代入上式,可以求得扭矩与加速度和速度的关系也就是系统的实际拉格朗日-欧拉动力学方程为:
或者写作:
关节空间的动力学方程反映了关节力矩与关节变量、速度和加速度之间的函数关系,至此模型建立完毕。
步骤六:激光追踪测量系统机械结构运动特性对激光追踪测量系统性能的影响分析。根据激光追踪测量系统中机械结构理想动力学模型在Matlab环境中建立相应数学模型进行验证,分析系统对于加速启动和匀速追踪过程的关节力矩的动态响应。
本发明的有益效果为:在激光追踪测量系统中,系统机械结构性能决定着激光追踪测量系统的追踪性能,而机械结构主要做回转和俯仰运动,因此两轴扭矩是一个关键影响参数,为了进行激光追踪测量系统机械结构参数对激光追踪测量系统追踪性能的影响的研究,本发明提出了基于激光追踪测量系统机械结构的理想动力学模型建立方法。首先建立了机械结构的坐标系统,然后建立了其D-H数学模型,基于机械系统动力学的原理分析,建立基于激光追踪测量系统机械结构的理想动力学模型,最后进行模型的验证以及分析不动运动状态对结果的影响,为两轴系运动关节电机的选型以及机械结构优化提出建议。
附图说明
图1激光追踪测量系统机械结构三维模型图。
图2激光追踪测量系统机械结构D-H模型坐标系分配示意图。
图3系统D-H模型坐标系0转换到坐标系1示意图。
图4系统D-H模型坐标系1转换到坐标系2示意图。
图5机械结构设计要求的负载曲线。
图6启动过程中两关节力矩曲线。
图7匀速追踪过程中两关节力矩曲线。
具体实施方式
下面结合附图对本发明做进一步地详细说明,以令本领域技术人员参照说明书文字能够据以实施。
步骤一:建立激光追踪测量系统机械结构的D-H模型坐标系。如图2所示,坐标系整体采用的刚体质心笛卡尔坐标系和反应刚体方位的欧拉角作为广义坐标,建立三个坐标系。设底部基座中心位置为坐标原点O
步骤二:建立激光追踪测量系统机械结构D-H模型的齐次变换矩阵。对于D-H模型的坐标系转换有公式:
其中:
根据步骤一建立的坐标系统和转换公式,建立其三个坐标系的齐次变换矩阵,有:
步骤三:基于激光追踪测量系统机械结构动力学原理应用拉格朗日方程法求解系统动能项。
由拉格朗日函数L所描述的系统动力学状态的拉格朗日方程为:
其中,F
基于上述公式,对于旋转关节i,可以得到:
旋转关节i=1和2时的惯性矩矩阵为:
两自由度惯性加速度相关的系统矩阵为:
根据前述步骤求得科里奥利力和离心项分别是:
两个牵引轴的惯性矩矩阵为:
步骤四:基于激光追踪测量系统机械结构动力学原理拉格朗日方程法求解系统势能。在应用激光追踪测量系统进行目标跟踪的过程中没有机械结构的平移运动而是只有旋转运动,该系统中的负载是俯仰轴系前端的整个光学干涉系统,为了平衡其向上和向下运动过程中受力均衡以及为了减小俯仰轴控制电机启动工作带来的偏差,进行了相应的配重设计,因此在此分析中可以忽略摩擦扭矩的影响。系统的动能中仅包括旋转部分,并且由于机械结构在追踪过程中没有垂直运动,因此无需考虑势能。
步骤五:基于激光追踪测量系统机械结构动力学原理拉格朗日方程法建立动力学模型。
已知两自由度机械机械结构的拉格朗日-欧拉动力学方程为:
上式为动力学方程封闭形式的一般结构。
将惯性矩的值代入上式,可以求的扭矩与加速度和速度的关系也就是系统的实际拉格朗日-欧拉动力学方程为:
或者写作:
关节空间的动力学方程反映了关节力矩与关节变量、速度和加速度之间的函数关系。
步骤六:激光追踪测量系统机械结构运动特性对激光追踪测量系统性能的影响分析。根据激光追踪测量系统中机械结构理想动力学模型在Matlab环境中建立相应数学模型进行验证,如图5所示,是设计要求的机械结构负载曲线,根据此在Matlab中定义相应的运动状态模拟实际运动,分析系统对于加速启动和匀速追踪过程的动态响应。如图6所示,在启动过程中两关节瞬时产生一个力矩值,此值可作为电机选型的参考以及机械结构强度设计的依据,如图7所示,在匀速追踪过程中,无加速度项,力矩值为零,符合的理论上分析。
- 一种基于激光追踪测量系统机械结构的理想动力学模型建立方法
- 一种基于激光追踪测量系统机械结构的模态分析方法