一种水下监控系统及方法
文献发布时间:2023-06-19 09:33:52
技术领域
本发明涉及公共安全技术领域,尤其涉及一种水下监控系统及方法。
背景技术
目前传统的声探测无法实时成像,且光探测时光波在水下传播过程中会受严重的吸收作用和散射作用影响,从而严重的限制了水下光学成像的距离,造成成像结果亮度降低、对比度下降、图像模糊、分辨率降低等图像质量退化问题,从而导致水下监控系统成像效果不佳。
因此,针对以上不足,需要提供一种成像效果好的水下监控系统。
发明内容
本发明要解决的技术问题在于现有技术的水下监控系统成像效果不佳,针对现有技术中的缺陷,提供一种可以提高成像效果的水下监控系统。
为了解决上述技术问题,本发明提供了一种水下监控系统,该系统包括:
多波束声呐、光学探测模块和综合显控模块;
其中,所述多波束声呐和所述光学探测模块设置于水下,所述综合显控模块设置于水上;
所述多波束声呐,用于根据所述综合显控模块发出的第一控制信号,向水底发出多波束信号,接收经过水底反射回来的多波束信号,并将所述多波束信号进行声电转换,对水底的地理信息进行二维实时成像,以能够生成所述多波束声呐作用距离范围内的声呐图像,其中,所述声呐图像用于表征所述水底的地理信息;
所述光学探测模块,用于根据所述综合显控模块的第二控制信号,通过激光距离选通成像的方式采集目标待识别物体的光学图像,其中,所述第二控制信号是在所述综合显控模块确定出所述声呐图像中包含至少一个待识别物体时发出的信号,所述目标待识别物体包含于所述至少一个待识别物体中,所述目标待识别物体的光学图像与所述目标待识别物体的声呐图像的类别相同;
所述综合显控模块,用于发出所述第一控制信号和所述第二控制信号,接收所述多波束声呐发来的所述声呐图像,接收所述光学探测模块发来的所述目标待识别物体的光学图像。
优选地,
所述光学探测模块包括:光学探测器、激光器、全彩夜视相机和嵌入式图像处理模块;
其中,所述光学探测器,用于根据所述综合显控模块的所述第二控制信号,向所述全彩夜视相机发送采集所述目标待识别物体的光学图像的信号,其中,所述目标待识别物体包含于所述至少一个待识别物体中,所述目标待识别物体的光学图像与所述目标待识别物体的声呐图像的类别相同;
所述激光器,用于向所述目标待识别物体发射激光脉冲信号,以对所述目标待识别物体进行照射;
所述全彩夜视相机,用于接收所述目标待识别物体反射回来的激光脉冲信号;在所述目标待识别物体反射所述激光脉冲信号时,开启所述全彩夜视相机选通,其中,所述选通脉冲宽度和激光脉冲宽度在预设阈值内;
所述嵌入式图像处理模块,用于对所述目标待识别物体通过光电转换进行成像,生成所述目标待识别物体的光学图像。
优选地,
进一步包括:水下运载平台;
所述水下运载平台,用于搭载所述多波束声呐和所述光学探测模块,并接收所述综合显控模块发来的所述第一控制信号和所述第二控制信号,通过所述第一控制信号控制所述多波束声呐,通过所述第二控制信号控制所述光学探测模块。
优选地,
进一步包括:组网模块;
所述组网模块,用于通过无线网络传输的方式将所述目标声呐图像和所述光学图像发送给所述综合显控模块,并将所述综合显控模块生成的所述第一控制信号和所述第二控制信号发送给所述水下运载平台,通过所述水下运载平台对所述多波束声呐和所述光学探测模块进行控制,以能够实现所述多波束声呐、所述光学探测模块和所述综合显控模块的数据交互。
优选地,
进一步包括:微型处理器;
所述微型处理器,用于接收所述声呐图像,将所述声呐图像转换为目标格式的声呐图像,并将所述目标格式的声呐图像压缩为目标声呐图像,其中,所述目标格式为标准视频格式。
本发明还提供了一种水下监控方法,该方法包括:
利用多波束声呐,根据所述综合显控模块发出的第一控制信号,向水底发出多波束信号;
利用所述多波束声呐,接收经过水底反射回来的多波束信号;
利用所述多波束声呐,将所述多波束信号进行声电转换,对水底的地理信息进行二维实时成像,以能够生成所述多波束声呐作用距离范围内的声呐图像,其中,所述声呐图像用于表征所述水底的地理信息;
利用光学探测模块,根据所述综合显控模块的第二控制信号,通过激光距离选通成像的方式采集目标待识别物体的光学图像,其中,所述第二控制信号是在所述综合显控模块确定出所述声呐图像中包含至少一个待识别物体时发出的信号,所述目标待识别物体包含于所述至少一个待识别物体中,所述目标待识别物体的光学图像与所述目标待识别物体的声呐图像的类别相同;
利用综合显控模块,发出所述第一控制信号和所述第二控制信号;
利用所述综合显控模块,接收所述多波束声呐发来的所述声呐图像;
利用所述综合显控模块,接收所述光学探测模块发来的所述目标待识别物体的光学图像。
优选地,
所述利用光学探测模块,根据所述综合显控模块的第二控制信号,通过激光距离选通成像的方式采集目标待识别物体的光学图像,包括:
利用光学探测器,根据所述综合显控模块的第二控制信号,向所述全彩夜视相机发送采集所述目标待识别物体的光学图像的信号,其中,所述目标待识别物体包含于所述至少一个待识别物体中,所述目标待识别物体的光学图像与所述目标待识别物体的声呐图像的类别相同;
利用激光器,向所述目标待识别物体发射激光脉冲信号,以对所述目标待识别物体进行照射;
利用所述全彩夜视相机,接收所述目标待识别物体反射回来的激光脉冲信号;
利用所述全彩夜视相机,在所述目标待识别物体反射所述激光脉冲信号时,开启所述全彩夜视相机选通,其中,所述选通脉冲宽度和激光脉冲宽度在预设阈值内;
利用嵌入式图像处理模块,对所述目标待识别物体通过光电转换进行成像,生成所述目标待识别物体的光学图像。
优选地,
进一步包括:
利用水下运载平台,搭载所述多波束声呐和所述光学探测模块;
利用所述水下运载平台,接收所述综合显控模块发来的所述第一控制信号,通过所述第一控制信号控制所述多波束声呐;
利用所述水下运载平台,接收所述综合显控模块发来的所述第二控制信号,通过所述第二控制信号控制所述光学探测模块。
优选地,
进一步包括:
利用组网模块,通过无线网络传输的方式将所述目标声呐图像和所述光学图像发送给所述综合显控模块;
利用所述组网模块,将所述综合显控模块生成的所述第一控制信号和所述第二控制信号发送给所述水下运载平台,通过所述水下运载平台对所述多波束声呐和所述光学探测模块进行控制,以能够实现所述多波束声呐、所述光学探测模块和所述综合显控模块的数据交互。
优选地,
进一步包括:
利用微型处理器,接收所述声呐图像;
利用所述微型处理器,将所述声呐图像转换为目标格式的声呐图像,其中,所述目标格式为标准视频格式;
利用所述微型处理器,将所述目标格式的声呐图像压缩为目标声呐图像。
实施本发明的一种水下监控系统及方法,具有以下有益效果:
1、在本发明实施例中,由于现有的声呐成像分辨率低、图像理解难度大,且光学成像由于强烈的向后散射导致作用距离急剧下降,因此,为了解决当前水下监控的技术壁垒,可以采用声光融合式水下监控系统,先基于综合显控模块发出的第一控制信号控制多波束声呐在水下移动,同时多波束声呐可以发射和接收多波束信号,以对水下环境进行远距离探测成像,然后在获取的声呐图像中包含至少一个待识别物体时,可以基于综合显控模块发出的第二控制信号控制光学探测模块在水下移动,并采用激光距离选通成像方式,对水下环境进行近距离细节分辨。通过上述方式,多波束声呐可实现实时成像,对运载平台的运动轨迹没有要求,且在光学探测方式上通过距离选通成像方式可以增强作用距离和图像对比度,从而可以提高水下监控系统的成像效果;
2、在本发明实施例一中,光学探测模块采用光学成像方式对水下环境进行近距离细节分辨和成像,因此,可以设置光学探测模块包括:光学探测器、激光器、全彩夜视相机和嵌入式图像处理模块,光学探测器可以基于综合显控模块的第二控制信号,向全彩夜视相机发送采集目标待识别物体的光学图像的信号,同时,可以控制激光器向需要识别的目标待识别物体发射激光脉冲信号,对目标待识别物体进行照射,同时全彩夜视相机可以在接收到目标待识别物体反射回来的激光脉冲信号后,开启全彩夜视相机选通,此过程中可以控制选通脉冲宽度和激光脉冲宽度在预设阈值时,从而可以避免向后散射的光波的干扰,同时可以采用嵌入式图像处理模块,对水下图像进行增强,进一步提高水下监控系统的成像效果;
3、在本发明实施例一中,水下运载平台上可以搭载多波束声呐和光学探测模块,用于根据综合显控模块发出的指令控制多波束声呐和光学探测模块在水下的移动,水下运载平台能够在水里自动调节浮力和推进装置,根据指令进行上升或下降,前进或后退,或者按照规定程序自主巡航。
附图说明
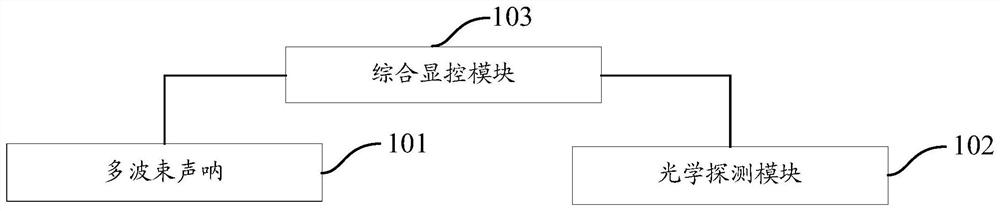
图1是本发明实施例一提供的一种水下监控系统的示意图;
图2是本发明实施例一提供的另一种水下监控系统的示意图;
图3是本发明实施例一提供的又一种水下监控系统的示意图;
图4是本发明实施例一提供的再一种水下监控系统的示意图;
图5是本发明实施例一提供的还一种水下监控系统的示意图;
图6是本发明实施例二提供的一种水下监控方法的流程图;
图7是本发明实施例二提供的另一种水下监控方法的流程图。
图中:101:多波束声呐;102:光学探测模块;1021:光学探测器;1022:激光器;1023:全彩夜视相机;1024:嵌入式图像处理模块;103:综合显控模块;104:水下运载平台;105:组网模块;106:微型处理器。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1所示,本发明实施例提供的一种水下监控系统,该系统可以包括:
多波束声呐101、光学探测模块102和综合显控模块103;
其中,多波束声呐101和光学探测模块设置于水下,综合显控模块设置于水上;
多波束声呐101,用于根据综合显控模块103发出的第一控制信号,向水底发出多波束信号,接收经过水底反射回来的多波束信号,并将多波束信号进行声电转换,对水底的地理信息进行二维实时成像,以能够生成多波束声呐101作用距离范围内的声呐图像,其中,声呐图像用于表征水底的地理信息;
光学探测模块102,用于根据综合显控模块103的第二控制信号,通过激光距离选通成像的方式采集目标待识别物体的光学图像,其中,第二控制信号是在综合显控模块103确定出声呐图像中包含至少一个待识别物体时发出的信号,目标待识别物体包含于至少一个待识别物体中,目标待识别物体的光学图像与目标待识别物体的声呐图像的类别相同;
综合显控模块103,用于发出第一控制信号和第二控制信号,接收多波束声呐101发来的声呐图像,接收光学探测模块102发来的目标待识别物体的光学图像。
需要说明的是,由于现有的声呐成像分辨率低、图像理解难度大,且光学成像由于强烈的向后散射导致作用距离急剧下降,因此,为了解决当前水下监控的技术壁垒,可以采用声光融合式水下监控系统,先基于综合显控模块发出的第一控制信号控制多波束声呐在水下移动,同时多波束声呐可以发射和接收多波束信号,以对水下环境进行远距离探测成像,然后在获取的声呐图像中包含至少一个待识别物体时,可以基于综合显控模块发出的第二控制信号控制光学探测模块在水下移动,并采用激光距离选通成像方式,对水下环境进行近距离细节分辨。通过上述方式,多波束声呐可实现实时成像,对运载平台的运动轨迹没有要求,且在光学探测方式上通过距离选通成像方式可以增强作用距离和图像对比度,从而可以提高水下监控系统的成像效果。
基于图1所示的水下监控系统,如图2所示,在本发明实施例一中,光学探测模块102包括:光学探测器1021、激光器1022、全彩夜视相机1023和嵌入式图像处理模块1024;
其中,光学探测器1021,用于根据综合显控模块103的第二控制信号,向全彩夜视相机1023发送采集目标待识别物体的光学图像的信号,其中,目标待识别物体包含于至少一个待识别物体中,目标待识别物体的光学图像与目标待识别物体的声呐图像的类别相同;
激光器1022,用于向目标待识别物体发射激光脉冲信号,以对目标待识别物体进行照射;
全彩夜视相机1023,用于接收目标待识别物体反射回来的激光脉冲信号;在目标待识别物体反射激光脉冲信号时,开启全彩夜视相机1023选通,其中,选通脉冲宽度和激光脉冲宽度在预设阈值内;
嵌入式图像处理模块1024,用于对目标待识别物体通过光电转换进行成像,生成目标待识别物体的光学图像。
需要说明的是,光学探测模块采用光学成像方式对水下环境进行近距离细节分辨和成像,因此,可以设置光学探测模块包括:光学探测器、激光器、全彩夜视相机和嵌入式图像处理模块,光学探测器可以基于综合显控模块的第二控制信号,向全彩夜视相机发送采集目标待识别物体的光学图像的信号,同时,可以控制激光器向需要识别的目标待识别物体发射激光脉冲信号,对目标待识别物体进行照射,同时全彩夜视相机可以在接收到目标待识别物体反射回来的激光脉冲信号后,开启全彩夜视相机选通,此过程中可以控制选通脉冲宽度和激光脉冲宽度在预设阈值时,从而可以避免向后散射的光波的干扰,同时可以采用嵌入式图像处理模块,对水下图像进行增强,进一步提高水下监控系统的成像效果。
基于图1所示的水下监控系统,如图3所示,在本发明实施例一中,进一步包括:水下运载平台104;
水下运载平台104,用于搭载多波束声呐101和光学探测模块102,并接收综合显控模块103发来的第一控制信号和第二控制信号,通过第一控制信号控制多波束声呐101,通过第二控制信号控制光学探测模块102。
需要说明的是,水下运载平台上可以搭载多波束声呐和光学探测模块,用于根据综合显控模块发出的指令控制多波束声呐和光学探测模块在水下的移动,水下运载平台能够在水里自动调节浮力和推进装置,根据指令进行上升或下降,前进或后退,或者按照规定程序自主巡航。
基于图3所示的水下监控系统,如图4所示,在本发明实施例一中,进一步包括:组网模块105;
组网模块105,用于通过无线网络传输的方式将目标声呐图像和光学图像发送给综合显控模块103,并将综合显控模块103生成的第一控制信号和第二控制信号发送给水下运载平台104,通过水下运载平台104对多波束声呐101和光学探测模块102进行控制,以能够实现多波束声呐101、光学探测模块102和综合显控模块103的数据交互。
需要说明的是,可以通过组网模块实现水下水上多级设备组网,使远距离控制与操作变为现实,组网模块可以基于无线组网(比如,4G或者340M应急通讯设备)方式,可以基于通信商的通讯中继设备(比如,电塔)进行数据交互,也可以自行搭建中继设备,传输距离为公里级,同时组网模块在水下运载平台端的无限发射天线应保证能够保证在通信阶段露出水面,其传输带宽应保证满足至少2路高清H.264/H.265压缩视频的传输带宽要求。
基于图1所示的水下监控系统,如图5所示,在本发明实施例一中,进一步包括:微型处理器106;
微型处理器106,用于接收声呐图像,将声呐图像转换为目标格式的声呐图像,并将目标格式的声呐图像压缩为目标声呐图像,其中,目标格式为标准视频格式。
需要说明的是,由于声纳原始图像数据大,当前并没有成熟的声纳视频压缩算法,因此,可以采用微型处理器将原始的声呐图像进行视频图像投影,然后再进行录屏形成标准视频格式的声呐图像,并将标准视频格式的声呐图像进行H.264或者H.265压缩后再进行数据传输。
如图6所示,本实施例二提供了一种水下监控方法,该方法包括:
步骤601:利用多波束声呐,根据综合显控模块发出的第一控制信号,向水底发出多波束信号;
步骤602:利用多波束声呐,接收经过水底反射回来的多波束信号;
步骤603:利用多波束声呐,将多波束信号进行声电转换,对水底的地理信息进行二维实时成像,以能够生成多波束声呐作用距离范围内的声呐图像,其中,声呐图像用于表征水底的地理信息;
步骤604:利用光学探测模块,根据综合显控模块的第二控制信号,通过激光距离选通成像的方式采集目标待识别物体的光学图像,其中,第二控制信号是在综合显控模块确定出声呐图像中包含至少一个待识别物体时发出的信号,目标待识别物体包含于至少一个待识别物体中,目标待识别物体的光学图像与目标待识别物体的声呐图像的类别相同;
步骤605:利用综合显控模块,发出第一控制信号和第二控制信号;
步骤606:利用综合显控模块,接收多波束声呐发来的声呐图像;
步骤607:利用综合显控模块,接收光学探测模块发来的目标待识别物体的光学图像。
在本发明实施例二中,由于现有的声呐成像分辨率低、图像理解难度大,且光学成像由于强烈的向后散射导致作用距离急剧下降,因此,为了解决当前水下监控的技术壁垒,可以采用声光融合式水下监控系统,先基于综合显控模块发出的第一控制信号控制多波束声呐在水下移动,同时多波束声呐可以发射和接收多波束信号,以对水下环境进行远距离探测成像,然后在获取的声呐图像中包含至少一个待识别物体时,可以基于综合显控模块发出的第二控制信号控制光学探测模块在水下移动,并采用激光距离选通成像方式,对水下环境进行近距离细节分辨。通过上述方式,多波束声呐可实现实时成像,对运载平台的运动轨迹没有要求,且在光学探测方式上通过距离选通成像方式可以增强作用距离和图像对比度,从而可以提高水下监控系统的成像效果。
在本发明实施例二中,利用光学探测模块,根据综合显控模块的第二控制信号,通过激光距离选通成像的方式采集目标待识别物体的光学图像,具体可以通过如下方式实现:
利用光学探测器,根据综合显控模块的第二控制信号,向全彩夜视相机发送采集目标待识别物体的光学图像的信号,其中,目标待识别物体包含于至少一个待识别物体中,目标待识别物体的光学图像与目标待识别物体的声呐图像的类别相同;
利用激光器,向目标待识别物体发射激光脉冲信号,以对目标待识别物体进行照射;
利用全彩夜视相机,接收目标待识别物体反射回来的激光脉冲信号;
利用全彩夜视相机,在目标待识别物体反射激光脉冲信号时,开启全彩夜视相机选通,其中,选通脉冲宽度和激光脉冲宽度在预设阈值内;
利用嵌入式图像处理模块,对目标待识别物体通过光电转换进行成像,生成目标待识别物体的光学图像。
在本发明实施例二中,进一步包括:
利用水下运载平台,搭载多波束声呐和光学探测模块;
利用水下运载平台,接收综合显控模块发来的第一控制信号,通过第一控制信号控制多波束声呐;
利用水下运载平台,接收综合显控模块发来的第二控制信号,通过第二控制信号控制光学探测模块。
在本发明实施例二中,进一步包括:
利用组网模块,通过无线网络传输的方式将目标声呐图像和光学图像发送给综合显控模块;
利用组网模块,将综合显控模块生成的第一控制信号和第二控制信号发送给水下运载平台,通过水下运载平台对多波束声呐和光学探测模块进行控制,以能够实现多波束声呐、光学探测模块和综合显控模块的数据交互。
在本发明实施例二中,进一步包括:
利用微型处理器,接收声呐图像;
利用微型处理器,将声呐图像转换为目标格式的声呐图像,其中,目标格式为标准视频格式;
利用微型处理器,将目标格式的声呐图像压缩为目标声呐图像。
如图7所示,为了更加清楚地阐述本发明的技术方案,本发明实施例提供了一种水下监控方法,包括:
步骤701:利用综合显控模块,发出第一控制信号和第二控制信号。
具体地,综合显控模块可以发送控制指令、接收状态信息和视频数据,提供人机预览界面。
步骤702:利用水下运载平台,搭载多波束声呐和光学探测模块,接收综合显控模块发来的第一控制信号,通过第一控制信号控制多波束声呐。
步骤703:利用多波束声呐,根据综合显控模块发出的第一控制信号,向水底发出多波束信号,接收经过水底反射回来的多波束信号。
步骤704:利用多波束声呐,将多波束信号进行声电转换,对水底的地理信息进行二维实时成像,以能够生成多波束声呐作用距离范围内的声呐图像,其中,声呐图像用于表征水底的地理信息。
具体地,声呐也可选用侧扫声纳,但要求水下运载平台按照规定的轨迹和航速进行运动,声纳作用距离不小于百米量级,图像数据更新率不小于10帧/秒。
步骤705:利用微型处理器,接收声呐图像,将声呐图像转换为目标格式的声呐图像,将目标格式的声呐图像压缩为目标声呐图像,其中,目标格式为标准视频格式。
举例来说,可以采用微型处理器将原始的声呐图像进行视频图像投影,然后再进行录屏形成标准视频格式的声呐图像,并将标准视频格式的声呐图像进行H.264或者H.265压缩后再进行数据传输。
步骤706:利用水下运载平台,接收综合显控模块发来的第二控制信号,通过第二控制信号控制光学探测模块。
具体地,水下运载平台的供电方式可以为自锂电池供电,该电池能够续航24小时以上。
步骤707:利用光学探测器,根据综合显控模块的第二控制信号,向全彩夜视相机发送采集目标待识别物体的光学图像的信号,其中,目标待识别物体包含于至少一个待识别物体中,目标待识别物体的光学图像与目标待识别物体的声呐图像的类别相同。
步骤708:利用激光器,向目标待识别物体发射激光脉冲信号,以对目标待识别物体进行照射。
步骤709:利用全彩夜视相机,在目标待识别物体反射激光脉冲信号时,开启全彩夜视相机选通,其中,选通脉冲宽度和激光脉冲宽度在预设阈值内。
步骤710:利用嵌入式图像处理模块,对目标待识别物体通过光电转换进行成像,生成目标待识别物体的光学图像,其中,第二控制信号是在综合显控模块确定出声呐图像中包含至少一个待识别物体时发出的信号,目标待识别物体包含于至少一个待识别物体中,目标待识别物体的光学图像与目标待识别物体的声呐图像的类别相同。
举例来说,相机可采用高动态低灵敏度全彩夜视相机,该相机可24小时工作,动态范围不小于80dB,探测灵敏度优于10
步骤711:利用组网模块,通过无线网络传输的方式将目标声呐图像和光学图像发送给综合显控模块。
步骤712:利用组网模块,将综合显控模块生成的第一控制信号和第二控制信号发送给水下运载平台,通过水下运载平台对多波束声呐和光学探测模块进行控制,以能够实现多波束声呐、光学探测模块和综合显控模块的数据交互。
具体地,组网模块可以对声纳图像和光学图像等图像数据、水下设备状态数据、水上设备控制数据进行有效传输,并将水上水下设备进行组网。通过组网模块实现信号的发送与接收。
步骤713:利用综合显控模块,接收多波束声呐发来的声呐图像和光学探测模块发来的目标待识别物体的光学图像。
具体地,综合显控模块可以包括固定终端和移动终端,固定终端可以运行在Windows操作系统上,作为服务器使用,终端监控界面提供声纳图像或光学图像显示与控制信息,同时可以对水下设备发送指令,综合显控模块也可集成有目标检测算法和多屏显示器显示等,移动终端可以为平板、手机或其他移动电子设备,方便人员实时查看图像。
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 一种水下发电机组及水下发电机组的密封防泄漏监控系统
- 一种水下生产监控系统和方法