应用于触摸轨迹的卡尔曼平滑处理方法、存储器及设备
文献发布时间:2023-06-19 09:35:27
技术领域
本发明涉及触摸控制技术领域,尤其涉及一种应用于触摸轨迹的卡尔曼 平滑处理方法存储器及设备。
背景技术
随着触摸控制技术的快速发展,像触摸屏,触控板等人机交互设备被广 泛应用于各种场合。人们对于触控,这种人机交互设备的要求越来越高,期 望其能快速、准确地识别各种触摸操作,同时能做出相应的响应。触摸滑 动作为最常用的触摸操作,能够准确地对其进行检测,并快速做出相应,是 每一个触控设备所必须有的功能。所以,能够正确地捕捉、跟踪并能够在触 控设备上实时地显示触摸物的轨迹显得尤为重要。
一般情况下,触控设备的处理系统,都是通过一帧的扫描数据,识别出 相应的点。所以在识别触摸物的运动轨迹时,会根据多帧数据,识别出一系 列离散的触摸点。然后将这些离散的点,进行处理,从而连接成触摸物的运 动轨迹。
综上所述,我们知道,在触控设备中对触摸物进行轨迹跟踪,还是由许 多离散的触摸点连接而成。但是,由于外界环境,噪声等因素的影响,存在 扫描的数据抖动较大的问题,从而会导致这些离散点的坐标,不准确,存在 很大的偏差,以至于连接起来的轨迹存在一些拐角或毛刺。
发明内容
针对现有的由于外界环境,噪声等因素的影响,存在扫描的数据抖动较 大的问题,从而会导致这些离散点的坐标,不准确,存在很大的偏差,以至 于连接起来的轨迹存在一些拐角或毛刺等问题。现提供一种应用于触摸轨迹 的卡尔曼平滑处理方法存储器及设备。
具体包括以下:
一种应用于触摸轨迹的卡尔曼平滑处理方法,其中,包括:
S1、对建立的数学模型进行初始化以获得初始值;
S2、基于所述初始值预测触摸点在某一时刻的位置估计值;
S3、获取所述某一时刻的测量值;
S4、将所述测量值对所述位置估计值进行修正,并将修正值作为初始值 继续返回步骤S2。
优选的,建立所述数学模型的方法包括:
确定状态变量;
建立状态转移方程;
建立观测方程,计算出过程噪声方差及观测噪声方差。
优选的,确定所述状态变量如下式所示:
其中,s
优选的,建立所述状态转移方程,如下式所示:
X
其中,状态转移矩阵:
状态转移噪声:
其中,w
优选的,建立所述观测方程如下式所示:
m
其中m
进一步的,由此可以计算出过程噪声方差,如下式所示:
为简化计算,直接令
R=E(V
其中,Q和R为算法中的两个可调参数,它们数值的大小对算法的影响是相 反的。
优选的,对所述数学模型进行初始化的方法如下式所示:
R=σ
H=[1 0];
其中,X
优选的,根据所述初始值预测触摸点在某一时刻的位置估计值的方法如 下式所示:
其中:
优选的,将所述测量值对所述位置估计值进行修正的方法如下式所示:
其中,X
还包括一种非易失性存储器,其中存储有软件,其中,所述软件用以实 现上述的卡尔曼平滑处理方法。
还包括一种触摸操作设备,包括一个或多个处理器和与其耦合的一个或 多个存储器,其中,所述一个或多个存储器用于存储计算机程序代码,所述 计算机程序代码包括计算机指令;
所述一个或多个处理器用于执行所述计算机指令并实现上述的卡尔曼平 滑处理方法。
上述技术方案具有如下优点或有益效果:
一方面,可有效的解决由于外界环境,数据抖动,噪声等因素的影 响,导致离散的触摸点连接起来形成的触摸轨迹,存在拐角和毛刺的技术问 题;
另一方面,针对现有的触摸轨迹平滑方法,需要连续识别并存储n帧 触摸点的位置坐标,需很大的数据存储空间,本发明的技术方案采用卡尔曼 平滑处理方法,其是一迭代过程,既不需要存储全部历史数据,也不需要存 储一组数据,从而可以大大减小数据存储问题。
附图说明
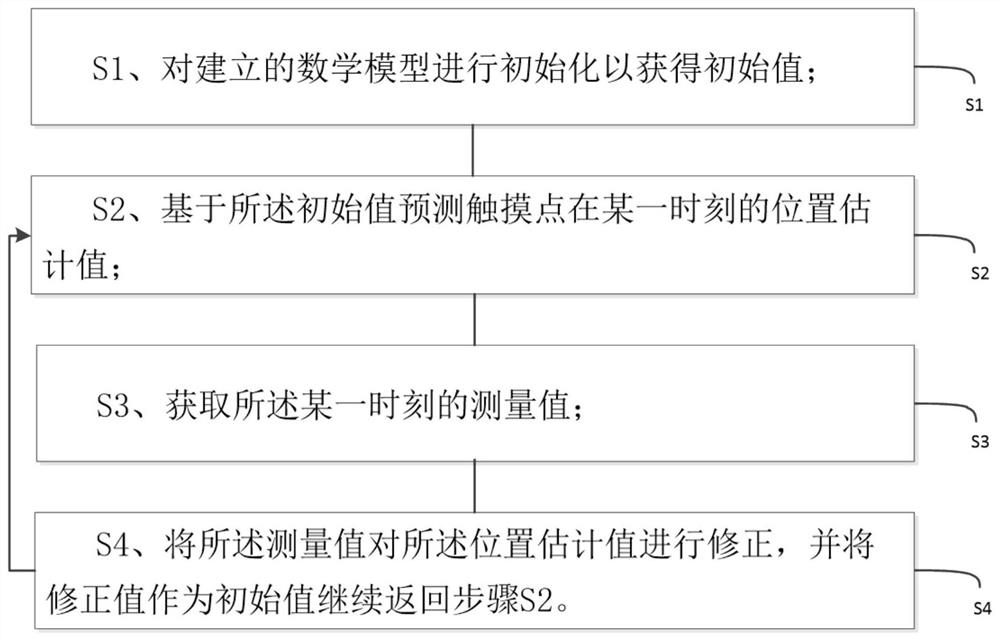
图1是本发明中的一种应用于触摸轨迹的卡尔曼平滑处理方法的实施例 的流程示意图;
图2-5是本发明中的一种应用于触摸轨迹的卡尔曼平滑处理方法的实施 例中,采用MALTAB进行验证的流程示意图;
图6是本发明中的一种触摸操作设备的实施例的结构示意图。
上述附图标记表示:
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行 清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而 不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作 出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范 围。
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特 征可以相互组合。
下面结合附图和具体实施例对本发明作进一步说明,但不作为本发明的 限定。
具体包括以下内容:
本发明的技术方案中包括一种应用于触摸轨迹的卡尔曼平滑处理方法。
如图1所示,一种应用于触摸轨迹的卡尔曼平滑处理方法的实施例,其 中,包括:
S1、对建立的数学模型进行初始化以获得初始值;
S2、基于初始值预测触摸点在某一时刻的位置估计值;
S3、获取某一时刻的测量值;
S4、将测量值对位置估计值进行修正,并将修正值作为初始值继续返回 步骤S2。
上述技术中,该数学模型在不断的通过实际测量值对预测值进行修订, 需要说明的是,在每一次的预测过程,均是在不同时刻进行预测的,通过不 断的迭代,经过处理后的轨迹更加平滑,有效的克服了现有的由于外界环 境,数据抖动,噪声等因素的影响,导致离散的触摸点连接起来形成的触摸 轨迹,存在拐角和毛刺的技术问题。
在一种较优的实施方式中,建立数学模型的方法包括:
确定状态变量;
建立状态转移方程;
建立观测方程,计算出过程噪声方差及观测噪声方差。
在一种较优的实施方式中,确定状态变量如下式所示:
其中,s
在一种较优的实施方式中,建立状态转移方程,如下式所示:
X
其中,状态转移矩阵:
状态转移噪声:
其中,w
在一种较优的实施方式中,建立观测方程如下式所示:
m
其中m
进一步的,由此可以计算出过程噪声方差,如下式所示:
为简化计算,直接令
R=E(V
其中,Q和R为算法中的两个可调参数,它们数值的大小对算法的影响是相 反的。
在一种较优的实施方式中,对数学模型进行初始化的方法如下式所示:
R=σ
H=[1 0];
其中,X
在一种较优的实施方式中,根据初始值预测触摸点在某一时刻的位置估 计值的方法如下式所示:
其中:
在一种较优的实施方式中,将测量值对位置估计值进行修正的方法如下 式所示:
其中,X
针对上述的应用于触摸轨迹的卡尔曼平滑处理方法,采用MALTAB进行 验证,如图2-5所示,具体步骤如下:
首先收集触摸轨迹为直线时的原始坐标数据。并绘制其轨迹,如图中红 线所示。
然后,原始坐标数据经过Kalman平滑处理,并绘制处理过后的运动轨 迹,这里固定σ
很明显可以看到,经过处理后的轨迹更加平滑。从不同的R得到的图可 以看出R越大平滑效果越好,但是数据延迟也越大,因此实际中应按需调整 R。
本发明的技术方案中还包括一种非易失性存储器。
一种非易失性存储器的实施例,其中存储有软件,其中,软件用以实现 上述的卡尔曼平滑处理方法。
上述技术方案中,实现上述方法实施例的全部或部分步骤可以通过程序 指令相关的硬件来完成,前述的程序可以存储于计算机可读取存储介质中, 该程序在执行时,执行包括上述方法实施例的步骤:而前述的存储介质包 括:ROM、RAM、磁碟或者光盘等各种可以存储程序代码的介质。
本发明的技术方案中还包括一种触摸操作设备。
如图6所示,一种触摸操作设备的实施例,包括一个或多个处理器A和 与其耦合的一个或多个存储器B,其中,一个或多个存储器B用于存储计算 机程序代码,计算机程序代码包括计算机指令;
一个或多个处理器A用于执行计算机指令并实现上述的卡尔曼平滑处理 方法。
上述技术方案中,触摸操作设备可包括,触摸屏,触摸板,平板电脑, 车载系统。
以上仅为本发明较佳的实施例,并非因此限制本发明的实施方式及保护 范围,对于本领域技术人员而言,应当能够意识到凡运用本发明说明书及图 示内容所作出的等同替换和显而易见的变化所得到的方案,均应当包含在本 发明的保护范围内。
- 应用于触摸轨迹的卡尔曼平滑处理方法、存储器及设备
- 一种触摸轨迹平滑处理方法