一种基于激光雷达的自动卷帘门
文献发布时间:2023-06-19 09:35:27
技术领域
本申请涉及卷帘门技术领域,尤其涉及一种基于激光雷达的自动卷帘门。
背景技术
现有工业场景中,自动卷帘门采用的触发技术有:红外扇面感应器,超声波,地磁,其中红外扇面感应器探测范围较大,无法实现定点触发开/关门,易受周围环境干扰造成误触发,卷帘门频繁开关易发生损坏,且存在安全隐患;超声波同理发散角度较大、易误报;地磁可以准确识别车辆,但不能识别人,且地磁施工、维护成本较高。因此,人们需要一种能够定点触发开/关门,同时识别人/车的自动卷帘门。
发明内容
本申请实施例在于提出一种基于激光雷达的自动卷帘门,解决现有技术存在的不能同时满足误触发率低和能够识别人车的问题。
为达此目的,本申请实施例采用以下技术方案:
一方面,一种基于激光雷达的自动卷帘门,包括卷帘门、升降机构、控制装置和激光雷达,所述的升降机构分别与控制装置、卷帘门连接,用于带动卷帘门移动,所述的激光雷达设置在卷帘门顶部,用于向预设方向探测,形成一探测区域,激光雷达预存有阈值,控制装置里存储预设时间,当激光雷达实时测量距离小于预存阈值时,判定有物体进入探测区域,激光雷达向控制装置发出信号,控制装置向升降机构发出上升指令,升降机构带动卷帘门上升,当激光雷达实时测量距离大于预存阈值且持续预设时间后,控制装置向升降机构发出下降指令,升降机构带动卷帘门下降。
在一种可能的实现方式中,所述的激光雷达为单点激光雷达。
在一种可能的实现方式中,所述的激光雷达探测距离为5-15米,俯角为30-60°。
在一种可能的实现方式中,所述的激光雷达探测距离为8-10米,俯角为35-45°。
在一种可能的实现方式中,所述的预存阈值为4-15米,预设时间为5-20秒。
在一种可能的实现方式中,所述的预存阈值为5-10米,预设时间为10-15秒。
在一种可能的实现方式中,所述的控制装置为单片机或微处理器。
在一种可能的实现方式中,所述的升降机构为升降电机。
在一种可能的实现方式中,所述的基于激光雷达的自动卷帘门,还包括警示模块,所述的警示模块与控制装置连接,用于在升降机构带动卷帘门下降时,向经过人员、车辆发出警示。
在一种可能的实现方式中,所述的警示模块为警报器或警报灯或警报器和警报灯。
本申请采用激光雷达向预设方向探测,形成一探测区域,仅在该探测区域内触发开关门,不易受环境干扰而误报,对人/车均适用,解决了现有技术不能同时满足误触发率低和识别人/车的问题。
附图说明
图1是本申请实施例的模块连接示意图。
图2是本申请实施例模块连接示意图。
图3是本申请实施例模块连接示意图(包括警示模块)。
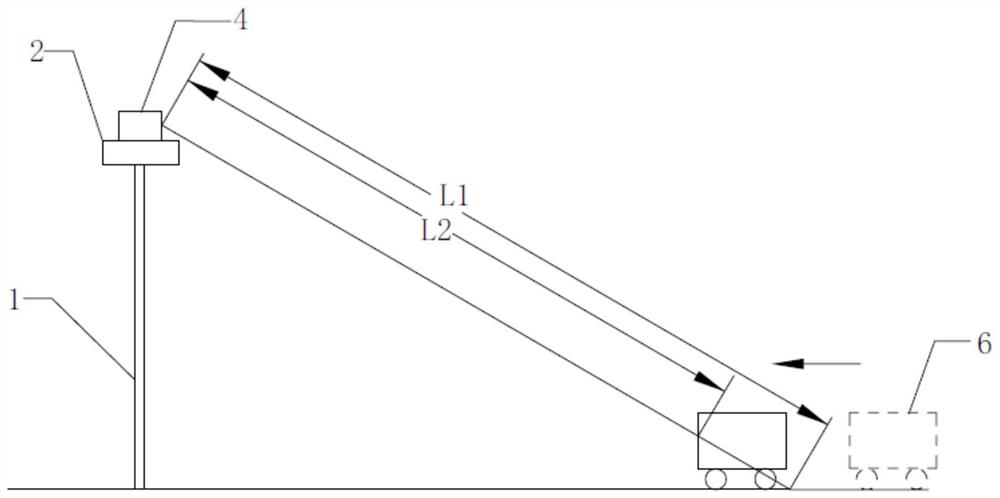
1、卷帘门;2、升降机构;3、控制装置;4、激光雷达;5、警示模块;6、物体。
具体实施方式
下面结合附图并通过具体实施方式来进一步说明本申请的技术方案。
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本申请。
为了使本技术领域的人员更好地理解本申请方案,下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请一部分的实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本申请保护的范围。
需要说明的是,本申请的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本申请的实施例。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、装置、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
如图1、图2所示,一种基于激光雷达的自动卷帘门,包括卷帘门1、升降机构2、控制装置3和激光雷达4,所述的升降机构2分别与控制装置3、卷帘门1连接,用于带动卷帘门1移动,所述的激光雷达4设置在卷帘门1顶部,用于向预设方向探测,形成一探测区域,激光雷达4预存有阈值,控制装置3里存储预设时间,当探测区域内无物体6时,激光雷达实时测量距离为L1,L1大于预存阈值;当探测区域内出现物体6时,激光雷达出射光照射到物体上后即反射,实时测量距离为L2,L2小于预存阈值,激光雷达4判定有物体进入探测区域,此时激光雷达4向控制装置3发出信号,控制装置3向升降机构2发出上升指令,升降机构2带动卷帘门1上升,当物体6离开探测区域后,激光雷达实时测量距离恢复为L1,L1大于预存阈值且持续预设时间后,控制装置3向升降机构2发出下降指令,升降机构2带动卷帘门1下降。
本申请采用激光雷达4向一预设方向探测,形成一探测区域,在该区域内有物体时,触发开关门,其他区域不会触发开关门,因此不易受环境干扰而误报,同时对人/车均适用,解决了现有技术不能同时满足误触发率低和识别人/车的问题。
激光雷达主动探测判断是否有车辆或人员需要通过,并向控制装置3发出信号,控制装置3根据信号向升降机构2发出上升或下降指令,升降机构2带动卷帘门1自动升降。自动卷帘门节约人员下车去指定地点开关门的时间、提升运营效率,且适用于只有人或车或人车均通过的运营环境。
所述的激光雷达4为单点激光雷达。
激光雷达4选取单点激光雷达,单点激光雷达具有视场角小、光束能量集中,仅在探测区域触发开关门,不易出现误触发的情况,同时单点激光雷达采取非接触式测量的方式,改造简单、维护便捷。
所述的激光雷达4探测距离为5-15米,俯角为30-60°。
所述的激光雷达4探测距离为8-10米,俯角为35-45°。
实际应用中,可根据门高、现场实际工况合理选择激光雷达的量程参数、安装高度和安装角度,一般来说,激光雷达4探测距离为5-15米,俯角为30-60°,即可满足应用需要,优选为探测距离为8-10米,俯角为35-45°。
安装过程中,可借助红外相机辅助检测激光雷达光斑落在地面上的位置,并做好标记,作为探测区域,即开/关门的触发点。
所述的预存阈值为4-15米,预设时间为5-20秒。
所述的预存阈值为5-10米,预设时间为10-15秒。
激光雷达4预存阈值为4-15米,控制装置3预设时间为5-20秒,预存阈值设置在4-15米,过小则存在误触发的问题,过大则触发困难;预设时间为5-20秒,保证人车能够安全离开卷帘门下方,降低安全隐患。优选为预存阈值为5-10米,预设时间为10-15秒。
所述的控制装置3为单片机或微处理器。
所述的升降机构2为升降电机。
单片机、微处理器、升降电机为现有技术。
如图3所示,所述的基于激光雷达的自动卷帘门,还包括警示模块5,所述的警示模块5与控制装置3连接,用于在升降机构2带动卷帘门1下降时,向经过人员、车辆发出警示。
所述的警示模块5为警报器或警报灯或警报器和警报灯。
因为激光雷达4探测不到卷帘门1正下方,因此存在卷帘门下降时,人或车还在卷帘门下方的情况,警示模块5可通过声光信号提示人车离开卷帘门下方,降低风险。
以上结合具体实施例描述了本申请的技术原理。这些描述只是为了解释本申请的原理,而不能以任何方式解释为对本申请保护范围的限制。基于此处的解释,本领域的技术人员不需要付出创造性的劳动即可联想到本申请的其它具体实施方式,这些方式都将落入本申请的保护范围之内。
- 一种基于激光雷达的自动卷帘门
- 一种基于驱动式前置放大电路的卷帘门用自动控制系统