一种参数化变形海洋立管整流罩抑制装置
文献发布时间:2023-06-19 09:35:27
技术领域
本发明涉及一种可参数化变形的海洋立管整流罩抑制装置,尤其是一种用于海洋油气钻采领域的海洋立管涡激振动抑制装置。
背景技术
海洋立管是深水油气钻采领域的核心装备,在深水中海洋立管可以看成柔性体,当水下海流流经海洋立管时会在其后方形成周期性的漩涡,漩涡的脱离会使海洋立管产生周期性的运动,引起海洋立管产生涡激振动现象。当漩涡脱离频率接近海洋立管的固有频率时,海洋立管的涡激振动会增强,易发生疲劳失效事故,进而造成经济损失、环境损失与人员伤亡。传统的海洋立管涡激振动抑制装置结构简单,变形能力小甚至没有,无法适应复杂多变的海洋环境;较为新颖的抑制装置又缺乏对抑制装置变形的参数化控制。为了解决上述问题,提出一种可参数化变形的海洋立管整流罩抑制装置,针对不同的海洋环境主动控制改变涡激振动抑制装置的形状,实现不同海洋环境下的海洋立管涡激振动抑制。
发明内容
本发明要解决的技术问题是提供一种可参数化变形的海洋立管整流罩抑制装置,该装置可以实现根据不同海况调节自身整流罩外壳形状,达到抑制涡激振动的最佳效果。
本发明是通过以下技术方案实现的:一种可参数化变形的海洋立管整流罩抑制装置,其特征在于:它包括支撑部分、旋转部分、外壳部分、参数化变形部分、伺服控制部分。
所述支撑部分包括支撑套筒、固定机座,起到支撑与安装定位作用。
所述旋转部分包括海洋立管、轴承,所述轴承的内圈与所述立管的外圈相配合,所述轴承的外圈与所述支撑套筒的内圈实现配合,实现所述可参数化变形的海洋立管整流罩抑制装置绕所述海洋立管进行旋转运动。
所述外壳部分包括复合材料外壳、铰接接头、弹性体,所述外壳部分采用分段式结构并与所述参数化变形部分铰接。
所述参数化变形部分包括变形部件一、变形部件二、变形部件三、变形部件四,所述变形部件均可实现对所述外壳部分进行独立变形控制,其中所述变形部件一、变形部件二,包括闭环伺服电机、齿轮、齿条、外壳连接件等,所述齿轮与所述齿条相啮合将所述伺服电机的旋转运动转化为所述外壳连接件的直线运动,所述变形部件三,包括闭环伺服电机、锥齿轮、滚珠丝杠、丝杠螺母、菱形连杆机构等,所述锥齿轮的啮合及所述丝杠螺母与所述滚珠丝杆的配合将所述伺服电机的旋转运动转化为所述菱形连杆机构的同步相对直线运动,所述变形部件四,包括闭环伺服电机、齿轮、滚珠丝杠、丝杠螺母、大支撑板等,所述齿轮通过啮合带动所述滚珠丝杠旋转,所述滚珠丝杠与所述丝杠螺母的配合将所述伺服电机的旋转运动转换为所述大支撑板的旋转运动,所述四个变形部件的组合运动实现了所述外壳部分的变形。
进一步的,所述伺服控制部分包括伺服驱动器、PLC、数据线,所述伺服电机与所述伺服电机驱动器安装在所述固定机座上,直接通过所述数据线相连,所述伺服电机驱动器与所述 PLC连接,所述PLC根据输入的位置参数向所述伺服电机发送相应数量的脉冲信号,所述变形部分各变形部件可以根据脉冲信号的多少到达指定变形位置,通过改变输入所述PLC的位置参数实现对所述海洋立管整流罩抑制装置的参数化变形控制。
本发明由于采用以上技术方案,其具有以下优点:1、本发明采用外形参数化变形海洋立管整流罩抑制装置,可通过改变整流罩外壳形状改变漩涡脱离频率,降低涡激振动强度,涡激振动抑制效果好;2、本发明可以使整流罩外壳在不同海洋条件下通过改变外形实现对涡激振动的最优控制,能够实现在不同海洋环境下对海洋立管涡激振动的自适应抑制,自适应能力强;3、本发明设计的机械式变形机构,结构简单,能够实现参数化控制,稳定性和可靠性比较高。本发明抑制效果好,适应能力强,可靠性高,可广泛应用于各种海洋油气钻采作业中。
附图说明
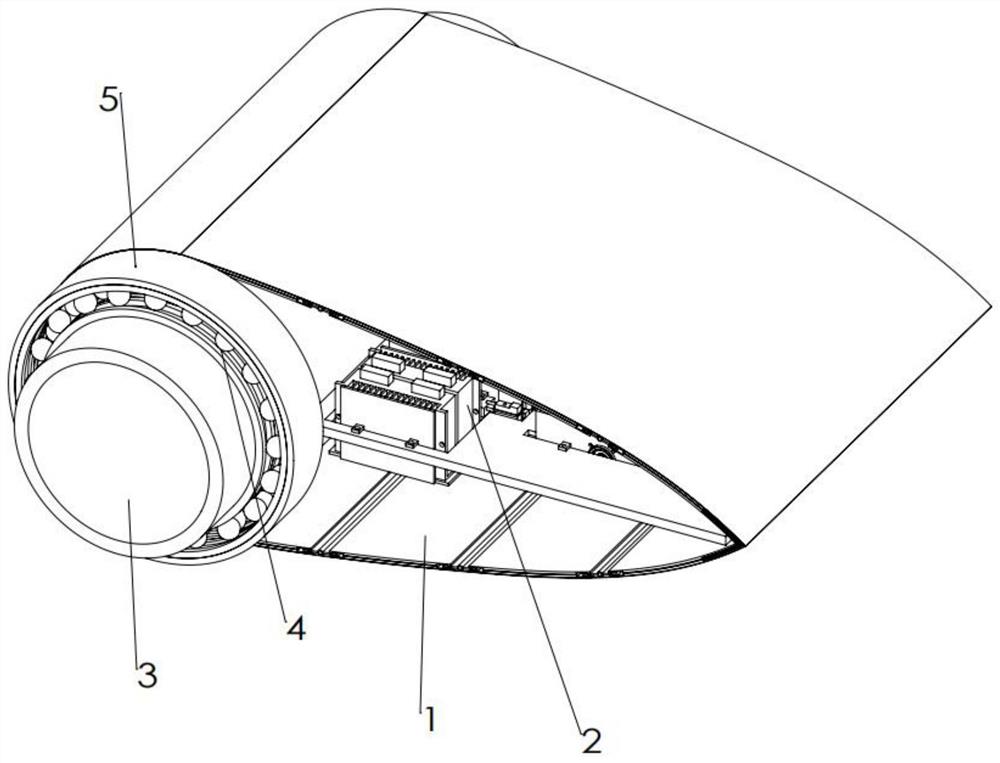
图1为本发明的整体结构示意图。
图2为本发明的内部结构示意图。
图3-图5为本发明的机械传动示意图。
图6为本发明的可旋转部分结构示意图。
图7为本发明的整流罩外壳结构示意图。
图中,1.复合材料外壳,2.伺服电机驱动器,3.海洋立管,4.角接触球轴承,5.支撑套筒,6.固定机座,7.闭环伺服电机,8.闭环伺服电机,9.机架,10.滑块,11.齿条,12.齿轮,13.滑轨,14.限位开关,15.联轴器16.滚珠丝杠,17.外壳连接件,18.锥齿轮,19.连杆机构,20.大支撑板,21.丝杠螺母,22.驱动轴,23.小支撑板,24.轴承支座,25.弹性橡胶薄层,26.弹性体,27.铝合金层,28.铰接接头,29.弹性薄膜。
具体实施方式
以下结合附图及实施例对本发明作进一步说明。
如图1、图2、图6所示,海洋立管3与角接触球轴承4配合连接,角接触球轴承4与支撑套筒5过盈配合连接,支撑套筒5带动整个结构绕海洋立管3做旋转运动,可实现不同海况下参数化变形海洋立管整流罩抑制装置方位的自动调整。
如图2、图3所示,闭环伺服电机7固定在机架9上,通过紧定螺钉对闭环伺服电机7进行定位,机架9固定到固定机座6上,通过紧固螺栓对机架9进行定位,闭环伺服电机7 与齿轮12连接,齿轮12与齿条11啮合,齿条11通过滑块连接件使用紧定螺钉固定到滑块 10上,滑块10安装在滑轨13上,滑轨13固定到机架9上,齿轮12与齿条11啮合将闭环伺服电机7的旋转运动转化为滑块10的直线运动,齿条11端部的外壳连接件17与复合材料外壳1接触,进而推动所述复合材料外壳1发生变形,复合材料外壳1的变形范围使用限位开关14进行控制。
如图2、图4所示,闭环伺服电机7固定在机架9上,通过紧定螺钉对闭环伺服电机7进行定位,机架9固定到固定机座6上,通过紧固螺栓对机架9进行定位,闭环伺服电机7 与联轴器15连接,联轴器15与锥齿轮18连接,三个锥齿轮18啮合,锥齿轮18与滚珠丝杠 16固定连接,滚珠丝杠16与所述轴承支座24配合连接,所述轴承支座24通过紧固螺栓固定在机架9上,丝杠螺母21安装在滚珠丝杠16上,锥齿轮18与滚珠丝杠16相配合将闭环伺服电机7的旋转运动转化为丝杠螺母21的水平直线运动,丝杠螺母21通过轴与滑块10固定,实现运动的稳定性,连杆机构19通过轴固定在丝杠螺母21上,使用连杆机构19将丝杠螺母21的水平直线运动转换为外壳连接件17的竖直直线运动,外壳连接件17与复合材料外壳1接触,进而推动所述复合材料外壳1发生变形,复合材料外壳1的变形范围使用限位开关14进行控制。
如图2、图5所示,闭环伺服电机8固定在机架9上,通过紧定螺钉对闭环伺服电机8进行定位,机架9固定到固定机座6上,通过紧固螺栓对机架9进行定位,闭环伺服电机8 与齿轮12连接,一对齿轮12相互啮合,齿轮12与滚珠丝杠16固定,滚珠丝杠16与轴承支座24配合连接,轴承支座24通过紧固螺栓固定在机架9上,丝杠螺母21安装在滚珠丝杠 16上,一对齿轮12啮合将所述闭环伺服电机8的旋转运动转化为丝杠螺母21的直线运动,驱动轴22一端固定在滚珠丝杠16上,另一端固定在滑块10上,滑块10安装在滑轨13上,滑轨13固定在中间板上,小支撑板23与驱动轴22铰接,大支撑板20与小支撑板23铰接,丝杠螺母21的直线运动转换为大支撑板20旋转运动,大支撑板20与复合材料外壳1接触,进而推动整复合材料外壳1发生变形。
如图1所示,复合材料外壳1与固定在支撑套筒5上,实现前端的定位,复合材料外壳 1内部与四个变形部件的末端接触,闭环伺服电机7或闭环伺服电机8通过中间机构带动变形部件的末端运动,推动复合材料外壳1发生变形,进而调节复合材料外壳1的形状到达最优状态,从而实现影响漩涡脱落频率与脱落位置,达到抑制涡激振动的目的,同时实现面对不同海况条件下,调节复合材料外壳1的形状到达最优状态。
如图1、图2所示,闭环伺服电机7或闭环伺服电机8与伺服电机驱动器2通过数据线相连,通过PLC发射脉冲来控制闭环伺服电机7或闭环伺服电机8的转动,进而实现对复合材料外壳1的变形的参数化控制。
如图7所示,复合材料外壳1为四层结构,其中内部三层分别为中间的铝合金层27与两侧包裹的弹性橡胶薄层25,能够保证复合材料外壳1具有一定刚性的同时也具有较大的柔性;复合材料外壳1尾端内部通过弹性体26连接,能够实现复合材料外壳1尾端变形时,复合材料外壳1始终保持封闭状态。最外层的弹性薄膜29覆盖在所述复合材料外壳1上,实现整流罩的密封。复合材料外壳1通过铰接接头28实现分段连接,变形时铰接接头28能够在复合材料外壳1中滑动与弯曲,能够实现相对转动,补偿复合材料外壳1变形过程中的位移。整流罩的截面能实现水滴形、燕尾形、鱼鳍形的变形,具有较好的截面形状,能够显著降低漩涡的脱离频率,降低涡激振动强度,延长海洋立管的使用寿命。
本发明方法的有益效果是:提出了一种可参数化变形的海洋立管整流罩抑制装置,通过一种可变形的机械结构,结合闭环伺服电机的驱动,通过高性能PLC发送命令进行控制,可以在不同海洋环境下通过改变整流罩外壳的外形来抑制涡激振动,降低了涡激振动对海洋立管的疲劳损伤,延长使用寿命。
本发明不局限于上述具体实施方式,根据上述内容,按照本领域的普通技术知识和惯用手段,在不脱离本发明上述基本技术思想前提下,本发明还可以做出其它多种形式的等效修改、替换或变更,均属于本发明的保护范围。
- 一种参数化变形海洋立管整流罩抑制装置
- 一种参数化变形海洋立管整流罩抑制装置