一种基于组合结构的微震传感器可回收式安装罩体及方法
文献发布时间:2023-06-19 09:35:27
技术领域
本发明属于采矿工程中煤矿井下监测技术领域,特别涉及一种基于组合结构的微震传感器可回收式安装罩体及方法。
背景技术
煤矿井下监测技术正处于蓬勃发展阶段,各种现场监测技术、设备被投入使用。近些年随着微震监测技术的不断完善,该技术已经成为岩石工程灾害监测与预报的重要技术之一,特别是煤矿井下的微震监测工作在我国煤监局的要求下开始广泛被应用。微震监测中所用的传感器安装是微震监测技术的重要环节,微震传感器的安装效率、传感器的实际使用效率以及未来对传感器的回收皆对微震信号的有效获取及投入成本至关重要。
目前,工程应用中传感器的安装大体分为外挂式和内嵌式,煤矿井下多采用内嵌式安装微震传感器,即在生产采区运输巷与回风巷非开采帮壁上钻进至2~3m的钻孔,后将微震传感器内嵌至钻孔内。
现阶段井下传感器的安装固定多用树脂锚固剂将传感器固定在倾斜钻孔内,这种安装方法虽然监测效果较好,成本较低,但安装效率低,往往因为钻孔内残有煤灰煤渣无法达到一次性稳固牢靠,费时费力,且因为树脂锚固力粘结力很强,若稳固后难以回收再次利用,大多情况下传感器永久被埋入在监测采场的煤壁或者岩壁里面。随着采场工作面的推进,传感器一旦出现问题,也无法进行检修与替换,进而影响监测效果;在这种安装方法下,若煤壁或者岩壁完整性较好,回收工作会较为顺利,但对于碎裂岩体深孔安装其回收几乎变为不可能;还有一些安装方法借助新型精密辅助设备,但众多辅助设备费时费力,且精密设备亦常常因为钻孔内未被冲洗干净的煤灰禁锢,可操作性受到限制。因此,需对现有安装技术进行改进。
发明内容
针对现有技术的上述问题,本发明提供一种基于组合结构的微震传感器可回收式安装罩体及方法,在倾斜钻孔中安装和回收微震传感器,是通过安装撑杆及微震传感器罩体组合,运用旋转-推压组合的机械方法优化目前传感器安装过程,提高安装效率,实现传感器的回收再利用,进一步降低成本。其具体技术方案如下:
一种基于组合结构的微震传感器可回收式安装罩体,包括安装撑杆单元、传感器罩体单元和支撑组合单元;
所述安装撑杆单元,包括安装撑杆外壳1、摇杆2、双联滚轮3、传动带4、传动轮5、链条Ⅰ6、双联传动齿轮Ⅰ7,套管8,调整弹簧9,穿线口10;
所述安装撑杆外壳1的前端设置有双联滚轮3,安装撑杆外壳1的尾端设置有套管8;所述双联滚轮3和传动轮5用固定杆固定在安装撑杆外壳1的半空腔体内,并通过传动带4连接,所述链条Ⅰ6与传动带4的尾端呈垂直角度并连接两个双联传动齿轮Ⅰ7,所述双联传动齿轮Ⅰ7部分外露于安装撑杆外壳1之外;所述摇杆2通过双联滚轮3联动传动带4的首端,传动带4的尾端通过传动轮5联动链条Ⅰ6的中部,链条Ⅰ6的两端分别联动两个双联传动齿轮Ⅰ7;所述穿线口10设置在安装撑杆外壳1的靠近双联滚轮3处;所述安装撑杆外壳1的尾部设置有调整弹簧9;
所述套管8末端卡扣微震传感器24的尾部连接线缆处;所述穿线口10用于穿连微震传感器24的连接线缆,所述微震传感器24的连接线缆经由套管8穿过安装撑杆外壳1的半空腔体,并穿出穿线口10与采集站相连接;
所述双联传动齿轮Ⅰ7直径为20mm,所述穿线口10直径为20mm~30mm;
所述安装撑杆外壳1整体为薄钢外壳,内部为半空腔体,整体长度在2~3m,所述调整弹簧9部位为非全覆盖钢外壳;所述链条Ⅰ6为全合金钢材质;
所述传感器罩体单元,包括传感器罩体外壳11、两侧对称的两个双联传动齿轮Ⅱ12和双联传动齿轮Ⅲ13及链条Ⅱ14、两侧对称的两个传送杆16及齿轮轨17、两侧对称的滑动轨道口15;
所述传感器罩体外壳11内腔中对称布局固定两个双联传动齿轮Ⅱ12和双联传动齿轮Ⅲ13,双联传动齿轮Ⅱ12和双联传动齿轮Ⅲ13之间通过链条Ⅱ14传动连接,双联传动齿轮Ⅱ12的部分轮齿外露于传感器罩体外壳11之外,所述双联传动齿轮Ⅱ12的外露部分啮合双联传动齿轮Ⅰ7;所述传感器罩体外壳11两侧各设置有开口作为滑动轨道口15,所述传送杆16与滑动轨道口15呈垂直布置,所述齿轮轨17固定在传送杆16上,齿轮轨17与双联传动齿轮Ⅲ13啮合;
所述双联传动齿轮Ⅱ12外露部分产生的传感器罩体外壳11的缺口为20mm;所述滑动轨道口15为10mm,所述滑动轨道口15做光滑处理;所述齿轮轨17的轨道长为50~55mm;
所述传感器罩体外壳11为铝合金材质或钢质材料,传感器罩体外壳11进深长度为两倍微震传感器24的长度;所述传感器罩体外壳11的内腔直径比微震传感器24直径长20~25mm;所述传感器罩体外壳11横截断面为圆形,壁体为中空结构,单侧壁体中空厚度为70~100mm;所述传感器罩体外壳11的内腔对传送杆16有收纳作用;
所述链条Ⅱ14为全合金钢材质;
所述支撑组合单元,包括传感器罩体外壳11两侧对称的两组空心滚轮18、可滑动轨道19、轨道边档20、可转动接口21、抓臂22和抓齿23;
所述可转动接口21设置在传感器罩体外壳11的外侧中部;所述空心滚轮18设置在传送杆16的外端,与传送杆16固定相连为一体,不产生相对滑动;所述可滑动轨道19穿过空心滚轮18,连接于可转动接口21;所述可滑动轨道19上设置轨道边档20;所述可滑动轨道19端部连接抓臂22,所述抓臂22连接抓齿23;
所述可转动接口21带动抓臂22的扩展和收缩,抓臂22进行0度至45度的摆动;所述轨道边档20限定空心滚轮18在可滑动轨道19的滑动距离;
所述可滑动轨道19长为80mm;
所述抓齿23上的分齿为固定形状并不会发生相对转动,抓齿23的端部做锐化处理;
所述抓臂22、抓齿23、可滑动轨道19均为钢质材料;
上述一种基于组合结构的微震传感器可回收式安装罩体的使用方法,包括如下步骤:
步骤1:根据现场实际条件及设计要求,在井下巷道两侧的煤壁或者岩壁上特定位置钻进1.5m至2.0m的倾斜钻孔,用一定压力的水流冲洗钻孔至孔内无煤屑或岩屑;
步骤2:将微震传感器24内嵌至传感器罩体外壳11内,然后将微震传感器24的尾部连接线缆穿过套管8开口经由安装撑杆外壳1内腔穿出穿线口10,调整安装撑杆单元使得套管8卡扣在传感器尾部,牵引微震传感器24的连接线缆至绷紧状态并向倾斜钻孔内推送安装撑杆单元,推进过程中确保抓臂22对称分布在两侧,将整个传感器罩体单元及微震传感器24的螺杆送至既定位置,推送过程中抓臂22呈收缩状态,与传感器罩体外壳11所呈夹角小于10度;
步骤3:顺时针摇动摇杆2,带动双联滚轮3转动,使传动带4带动传动轮5转动,传动轮5保持着与摇杆2的转动方向,传动轮5通过链条Ⅰ6使两个双联传动齿轮Ⅰ7同时转动,通过向孔内推动及左右小幅度摆动安装撑杆单元进而改变调整弹簧9的变形,完成两组双联传动齿轮Ⅰ7、双联传动齿轮Ⅱ12的咬合及动力传动;
步骤4:双联传动齿轮Ⅱ12逆时针转动,并通过链条Ⅱ14带动双联传动齿轮Ⅲ13转动,进而咬合推动齿轮轨17,传送杆16借助齿轮轨17的咬合作用被推送出,空心滚轮18始终固定在传送杆16的端部,同时外推抓臂22,直至抓齿23稳定卡靠在钻孔内壁上,传送杆16的位移即是空心滚轮18在可滑动轨道19上的运动距离,运动范围被轨道边档20控制,空心滚轮18已做光滑处理;
步骤5:后撤安装撑杆单元,仅把微震传感器24及传感器罩体单元留在倾斜钻孔内,并完成微震传感器24的连接线缆与井下采集仪的连接工作;
步骤6:针对微震传感器24的回收工作,需要将微震传感器24的连接线缆再次穿过安装撑杆外壳1,推送安装撑杆单元使得套管8卡扣在微震传感器24的尾部,此时逆时针转动摇杆2,整套设备机械运动与安装过程相反,完成抓臂22的收缩,通过微震传感器24的连接线缆牵引力完成微震传感器24以及传感器罩体单元的整体回收工作。
本发明的一种基于组合结构的微震传感器可回收式安装罩体及方法,与现有技术相比,有益效果为:
一、本发明采用齿轮联动作用,能够迅速的完成微震传感器的安装和回收工作。
二、传感器罩体单元保留在倾斜钻孔内,可以保护微震传感器;
三、支撑组合单元的抓臂、抓齿可以增强与煤岩壁的咬合强度及稳定性,传动链条为全合金钢材质,传动稳定牢靠,提高微震传感器安装回收工作效率和工作稳定性。
四、设装置简易,操作过程方便快捷,可应用在不同孔径钻孔内,大大提高安装效率和成功率,并实现传感器的回收再利用,进一步降低成本。
附图说明
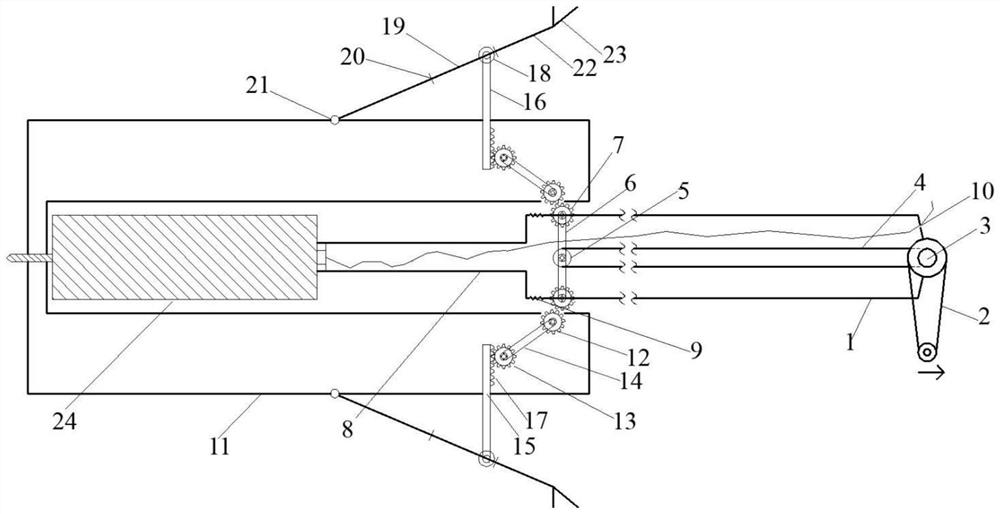
图1为本发明一种基于组合结构的微震传感器可回收式安装罩体的示意图;
图2为本发明一种基于组合结构的微震传感器可回收式安装罩体的安装撑杆单元侧视图;
图3为本发明一种基于组合结构的微震传感器可回收式安装罩体的传感器罩体单元和支撑组合单元的俯视图;
图4为本发明一种基于组合结构的微震传感器可回收式安装罩体在钻孔中的安装示意图;
图中:1-安装撑杆外壳,2-摇杆,3-双联滚轮,4-传动带,5-传动轮,6-链条Ⅰ,7-双联传动齿轮Ⅰ,8-套管,9-调整弹簧,10-穿线口,11-传感器罩体外壳,12-双联传动齿轮Ⅱ,13-双联传动齿轮Ⅲ,14-链条Ⅱ,15-滑动轨道口,16-传送杆,17-齿轮轨,18-空心滚轮,19-可滑动轨道,20-轨道边档,21-可转动接口,22-抓臂,23-抓齿,24-微震传感器。
具体实施方式
下面结合具体实施案例和附图1-4对本发明作进一步说明,但本发明并不局限于这些实施例。
如图1所示,一种基于组合结构的微震传感器可回收式安装罩体,包括安装撑杆单元、传感器罩体单元和支撑组合单元;
所述安装撑杆单元,包括安装撑杆外壳1、摇杆2、双联滚轮3、传动带4、传动轮5、链条Ⅰ6、双联传动齿轮Ⅰ7,套管8,调整弹簧9,穿线口10;
所述安装撑杆外壳1的前端设置有双联滚轮3,安装撑杆外壳1的尾端设置有套管8;所述双联滚轮3和传动轮5用固定杆固定在安装撑杆外壳1的半空腔体内,并通过传动带4连接,所述链条Ⅰ6与传动带4的尾端呈垂直角度并连接两个双联传动齿轮Ⅰ7,所述双联传动齿轮Ⅰ7部分外露于安装撑杆外壳1之外;所述摇杆2通过双联滚轮3联动传动带4的首端,传动带4的尾端通过传动轮5联动链条Ⅰ6的中部,链条Ⅰ6的两端分别联动两个双联传动齿轮Ⅰ7;所述穿线口10设置在安装撑杆外壳1的靠近双联滚轮3处;所述安装撑杆外壳1的尾部设置有调整弹簧9;
所述套管8末端卡扣微震传感器24的尾部连接线缆处;所述穿线口10用于穿连微震传感器24的连接线缆,所述微震传感器24的连接线缆经由套管8穿过安装撑杆外壳1的半空腔体,并穿出穿线口10与采集站相连接;
所述双联传动齿轮Ⅰ7直径为20mm,所述穿线口10直径为20mm~30mm;
所述安装撑杆外壳1整体为薄钢外壳,内部为半空腔体,整体长度在2~3m,所述调整弹簧9部位为非全覆盖钢外壳;所述链条Ⅰ6为全合金钢材质;
所述安装撑杆外壳1四周非全覆盖,其平面图为对称布局,侧面图在垂直方向上为非对称结构,安装撑杆单元侧面图如图2所示,套管8处于低位,这样利于微震传感器24的连接线缆顺利穿过,与传动带4互不影响;
所述传感器罩体单元,包括传感器罩体外壳11、两侧对称的两个双联传动齿轮Ⅱ12和双联传动齿轮Ⅲ13及链条Ⅱ14、两侧对称的两个传送杆16及齿轮轨17、两侧对称的滑动轨道口15;
所述传感器罩体外壳11内腔中对称布局固定两个双联传动齿轮Ⅱ12和双联传动齿轮Ⅲ13,双联传动齿轮Ⅱ12和双联传动齿轮Ⅲ13之间通过链条Ⅱ14传动连接,双联传动齿轮Ⅱ12的部分轮齿外露于传感器罩体外壳11之外,所述双联传动齿轮Ⅱ12的外露部分啮合双联传动齿轮Ⅰ7;所述传感器罩体外壳11两侧各设置有开口作为滑动轨道口15,所述传送杆16与滑动轨道口15呈垂直布置,所述齿轮轨17固定在传送杆16上,齿轮轨17与双联传动齿轮Ⅲ13啮合;
所述双联传动齿轮Ⅱ12外露部分产生的传感器罩体外壳11的缺口为20mm;所述滑动轨道口15为10mm,所述滑动轨道口15做光滑处理;所述齿轮轨17的轨道长为50~55mm;
所述传感器罩体外壳11为铝合金材质,传感器罩体外壳11进深长度为两倍微震传感器24的长度,为200mm;所述传感器罩体外壳11的内腔直径比微震传感器24直径长20mm,为60mm;所述传感器罩体外壳11横截断面为圆形,壁体为中空结构,单侧壁体中空厚度为70~100mm,如图3所示;所述传感器罩体外壳11的内腔对传送杆16有收纳作用;
所述链条Ⅱ14为全合金钢材质;
所述支撑组合单元,包括传感器罩体外壳11两侧对称的两组空心滚轮18、可滑动轨道19、轨道边档20、可转动接口21、抓臂22和抓齿23;
所述可转动接口21设置在传感器罩体外壳11的外侧中部;所述空心滚轮18设置在传送杆16的外端,与传送杆16固定相连为一体,不产生相对滑动;所述可滑动轨道19穿过空心滚轮18,连接于可转动接口21;所述可滑动轨道19上设置轨道边档20;所述可滑动轨道19端部连接抓臂22,所述抓臂22连接抓齿23;
所述可转动接口21带动抓臂22的扩展和收缩,抓臂22进行0度至45度的摆动;所述轨道边档20限定空心滚轮18在可滑动轨道19的滑动距离;
所述可滑动轨道19长为80mm;
所述抓齿23上的分齿为固定形状并不会发生相对转动,抓齿23的端部做锐化处理;
所述抓臂22、抓齿23、可滑动轨道19均为钢质材料;
如图1和图4所示,上述一种基于组合结构的微震传感器可回收式安装罩体的使用方法,包括如下步骤:
步骤1:根据现场实际条件及设计要求,在井下巷道两侧的煤壁或者岩壁上特定位置钻进1.5m至2.0m的倾斜钻孔,用一定压力的水流冲洗钻孔至孔内无煤屑或岩屑;
步骤2:将微震传感器24内嵌至传感器罩体外壳11内,然后将微震传感器24的尾部连接线缆穿过套管8开口经由安装撑杆外壳1内腔穿出穿线口10,调整安装撑杆单元使得套管8卡扣在传感器尾部,牵引微震传感器24的连接线缆至绷紧状态并向倾斜钻孔内推送安装撑杆单元,推进过程中确保抓臂22对称分布在两侧,将整个传感器罩体单元及微震传感器24的螺杆送至既定位置,推送过程中抓臂22呈收缩状态,与传感器罩体外壳11所呈夹角小于10度;
步骤3:顺时针摇动摇杆2,带动双联滚轮3转动,使传动带4带动传动轮5转动,传动轮5保持着与摇杆2的转动方向,传动轮5通过链条Ⅰ6使两个双联传动齿轮Ⅰ7同时转动,通过向孔内推动及左右小幅度摆动安装撑杆单元进而改变调整弹簧9的变形,完成两组双联传动齿轮Ⅰ7、双联传动齿轮Ⅱ12的咬合及动力传动;
步骤4:双联传动齿轮Ⅱ12逆时针转动,并通过链条Ⅱ14带动双联传动齿轮Ⅲ13转动,进而咬合推动齿轮轨17,传送杆16借助齿轮轨17的咬合作用被推送出,空心滚轮18始终固定在传送杆16的端部,同时外推抓臂22,直至抓齿23稳定卡靠在钻孔内壁上,传送杆16的位移即是空心滚轮18在可滑动轨道19上的运动距离,运动范围被轨道边档20控制,空心滚轮18已做光滑处理;
步骤5:后撤安装撑杆单元,仅把微震传感器24及传感器罩体单元留在倾斜钻孔内,并完成微震传感器24的连接线缆与井下采集仪的连接工作;
步骤6:针对微震传感器24的回收工作,需要将微震传感器24的连接线缆再次穿过安装撑杆外壳1,推送安装撑杆单元使得套管8卡扣在微震传感器24的尾部,此时逆时针转动摇杆2,整套设备机械运动与安装过程相反,完成抓臂22的收缩,通过微震传感器24的连接线缆牵引力完成微震传感器24以及传感器罩体单元的整体回收工作。
- 一种基于组合结构的微震传感器可回收式安装罩体及方法
- 一种基于组合结构的微震传感器可回收式安装罩体及方法