一种胼胝体及小脑蚓部的一体化定位及分割方法
文献发布时间:2023-06-19 09:38:30
技术领域
本发明涉及超声图像处理分析技术领域,尤其涉及一种胼胝体及小脑蚓部的一体化定位及分割方法。
背景技术
随着计算机技术在医学上的广泛应用,使得早先的人工标记与分割图像逐渐被计算机自动算法所替代。对于如何检测、判断胎儿的脑部发育情况,胼胝体与小脑蚓部二者的发育情况是重要的判断依据,目前通常采用人工定位及分割超声图像中胼胝体与小脑蚓部区域,并计算其轮廓长度、面积等特征信息来检测、判断胎儿脑部是否发育正常。如何精准高效定位胼胝体与小脑蚓部,并对其进行自动化分割,提取位置及轮廓信息成为关键的问题。目前对于超声图像定位及分割胼胝体及小脑蚓部问题,没有已知的有效的计算机一体化自动处理办法,都是由人工来人为定位及分割。这需要专业的知识储备,也花费了不少时间,并且效果不一定精细,所以准确性不能保证。
发明内容
根据现有技术存在的问题,本发明公开了一种胼胝体及小脑蚓部的一体化定位及分割方法,具体包括如下步骤:
获取人脑超声图像的胼胝体初始搜索区域、胼胝体平均模板以及小脑蚓部图像中的小脑蚓部平均模板,基于获取的信息采用聚类方式得到胼胝体初始搜索结果;
对胼胝体初始搜索结果进行扩充并将扩充后的结果作为搜索范围、以胼胝体平均模板为搜索依据进行模板尺寸自适应的滑动窗口搜索,将相似度大于设定阈值的图像进行聚类得到胼胝体精准搜索结果;
对胼胝体精搜索结果进行检测,判断该结果对应人脑超声图像区域是否为胼胝体区域,若符合检测标准,则认为得到胼胝体最终搜索结果,若不符合标准,则在以精搜索区域为搜索范围,进行一次模板尺寸自适应的滑动窗口搜索,最终确定胼胝体位置作为胼胝体最终搜索结果;
读取小脑蚓部图像初始搜索区域,基于胼胝体最终搜索结果进行主动轮廓模型算法迭代、以小脑蚓部初始搜索区域为搜索范围、以小脑蚓部平均模板为搜索依据采用自适应的滑动窗口搜索方式获取小脑蚓部初始搜索结果;
在人脑超声图像中,以基准点Center以及小脑蚓部初始搜索结果确定包含小脑蚓部的扇形范围区域,对该扇形区域进行图像增强处理,并获取其中的轮廓信息,对点集进行筛选获取可能是小脑蚓部轮廓的点集,并取点集的外接矩形区域作为小脑蚓部精搜索范围区域;将该小脑蚓部精搜索范围为搜索区域,以小脑蚓部平均模板图像为搜索依据、采用新相似度比较算法进行自适应模板尺寸滑动窗口搜索从而得到小脑蚓部精搜索结果;
根据小脑蚓部精搜索结果、从人脑超声图像中截取小脑蚓部图像对小脑蚓部进行轮廓拟合,得到小脑蚓部拟合轮廓;根据拟合轮廓周围像素值信息对其进行调整得到小脑蚓部初始轮廓;再根据轮廓上各点与小脑蚓部图像中心点连线上的像素值分布规律,依据弦高和角度的阈值判断方法对小脑蚓部初始轮廓进行迭代,最终得到小脑蚓部精确轮廓。
在人脑超声图像上以胼胝体初始搜索区域为搜索范围、以胼胝体平均模板为搜索依据进行模板尺寸自适应的滑动窗口搜索,将相似度大于设定阈值的图像进行聚类得到胼胝体初始搜索结果。
获取小脑蚓部初始搜索结果时:
首先基于胼胝体最终搜索结果进行主动轮廓模型算法迭代,分割胼胝体并得到其轮廓和位置信息;
根据胼胝体的轮廓和位置信息确定其几何中心点位置、并将该位置作为基准点Center;并根据人脑生理结构信息确定小脑蚓部位于胼胝体左下或右下位置,框选出胼胝体左下与右下两个区域,分别求得两个矩形区域的像素均值并比较,选择像素均值小的区域作为小脑蚓部初始搜索区域,并记录小脑蚓部相对胼胝体方向位置信息Loc;
在人脑超声图像上,以小脑蚓部初始搜索区域为搜索范围、以小脑蚓部平均模板为搜索依据、进行模板尺寸自适应的滑动窗口搜索,统计滑动窗口图像和模板图像的相似度并比较,将相似度大于设定阈值的滑动窗口图像的中心点进行聚类;选取最大类所包含的点集的几何中心作为小脑蚓部初始搜索结果的中心,并以自适应后的小脑蚓部平均模板尺寸作为小脑蚓部初始搜索结果,
所述胼胝体平均模板和小脑蚓部平均模板采用如下方式获取:
对N张人脑超声图像手工分割,获得N张包含胼胝体区域的矩形图像以及N张包含小脑蚓部区域的正方形图像,再对这两组图像分别进行降噪和增强处理;将这些图像转化成相同尺寸并输入对抗神经网络进行训练,分别得到一张包含胼胝体平均特征信息的矩形图像以及一张包含小脑蚓部平均特征信息的正方形图像,将这两张图像分别作为胼胝体平均模板和小脑蚓部平均模板。
所述胼胝体初始搜索结果采用如下方式获取:
读取胼胝体初始搜索区域的比例参数Rate,对胼胝体平均模板进行等比例缩放,将缩放后形成的图像作为胼胝体搜索模板Tmp1;
在胼胝体初始搜索区域范围内,对胼胝体进行滑动窗口搜索,具体操作为:以K为步长从上至下,从左至右在胼胝体初始搜索区域内截取与胼胝体搜索模板Tmp1同等大小的图像,将这些图像与胼胝体搜索模板Tmp1进行相似度比较,并将相似度大于设定阈值的图像在搜索区域内对应的位置信息进行统计,将筛选出的图像的中心点坐标整合成一个点集,并对点集进行聚类、将包含点个数最多的类筛选出来并求得该类所有点的几何中心;
以几何中心点的坐标作为胼胝体初始搜索结果在初始搜索区域内对应的中心点坐标;并以自适应变换后的胼胝体平均模板尺寸作为初始搜索结果对应的矩形区域的尺寸、最终得到胼胝体初始搜索结果。
所述胼胝体精准搜索结果采用如下方式获取:
以胼胝体初始搜索结果中心点为基准点,以初始搜索结果对应的矩形区域长宽的M倍为新的长宽,在人脑超声图像上以初始搜索结果进行区域扩展得到胼胝体精搜索区域,并将该区域作为胼胝体进一步搜索的范围;
将胼胝体初始搜索结果在人脑超声图像上单独切割出来,得到一个包含胼胝体的矩形图像,对该矩形图像进行直方图均衡化处理、双边滤波处理以及轮廓提取获得在初始搜索后的胼胝体二值图像;
基于胝体二值图像对胼胝体部分进行形态学处理并形成胼胝体骨骼,得到初始搜索后的胼胝体骨骼信息,再求解胼胝体骨骼对应的水平长度SkelLen;
以该水平长度SkelLen为胼胝体平均模板的长并对模板进行缩放得到新自适应胼胝体平均模板Tmp2;
在胼胝体精搜索区域范围内,对胼胝体进行滑动窗口搜索,以F为步长从上至下、从左至右在搜索区域内截取与新自适应胼胝体平均模板Tmp2同等大小的图像,将这些图像与自适应胼胝体平均模板Tmp2进行比较,分别采用三种相似度比较方法作为衡量标准得到相似度达到设定阈值的图像搜索位置,再将这些图像位置信息进行整合、形成一个同时包含这三种衡量标准搜索位置信息的集合作为这轮搜索的最终集合,把搜索区域内所有满足条件的位置信息进行统计;
将满足条件的位置的左上角点坐标汇总为点集P
所述胼胝体最终搜索结果采用如下方式获取:
将胼胝体精搜索结果区域在人脑超声图像上单独切割出来,得到胼胝体图像,并在中心处对图像进行竖直分割形成左右两张图像PicL和PicR,对图像PicR进行水平镜像翻转得到PicR′,对图像PicL和PicR′进行直方图均衡化处理,并对处理后的图像进行相似度比较,并得到左右两张图的相似度值,如果相似度值大于阈值则满足胼胝体相对对称的形状特性则输出胼胝体最终搜索结果,如果相似度值小于设定阈值则左右两张图相似度不满足条件,则将胼胝体精搜索结果区域作为再次搜索区域进行最终搜索;
胼胝体最终搜索以胼胝体精搜索结果区域为搜索范围,并将模板Tmp2进行等比例放缩得到新胼胝体平均模板Tmp3,经过在搜索范围内的滑动窗口搜索,得到胼胝体的最终搜索结果。
所述小脑蚓部初始搜索结果采用如下方式获取:
根据胼胝体尺寸信息获得胼胝体宽度W,再将小脑蚓部平均模板图像的边长转化为与胼胝体宽度相同、得到新小脑蚓部模板图像Tmp1;
在人脑超声图像上,以小脑蚓部初始搜索区域为搜索范围、以新小脑蚓部模板图像Tmp1为搜索依据进行滑动窗口搜索:以N为步长从上至下、从左至右在搜索区域内截取与新小脑蚓部模板图像Tmp1同等大小的图像,将截取的图像与新小脑蚓部模板图像Tmp1进行相似度比较,并将相似度大于设定阈值的图像在搜索区域内对应的位置信息进行统计;
将筛选出的图像的中心点坐标整合成一个点集,并对该点集进行聚类、将包含点个数最多的类筛选出来并求得该类所有点的几何中心点;
以几何中心点坐标作为小脑蚓部初始搜索结果、在初始搜索区域内对应的中心点坐标记为Center2,并以自适应变换后的小脑蚓部平均模板尺寸作为初始搜索结果对应的矩形区域的尺寸、从而最终得到小脑蚓部的初始搜索结果。
所述获取小脑蚓部精准轮廓时首先查找小脑蚓部初始拟合轮廓点,具体采用如下方式:
通过方向信息Loc判断小脑蚓部凹陷方向,再以小脑蚓部图像中心点为圆心Center、扇形区域拟合小脑蚓部:其中扇形一圆心坐标与Center坐标相同,半径为脑蚓部图像边长的1/2,记为1/2L,弧度为180°;其中扇形二圆心在Center上方1/8L处,半径为3/8L,弧度为120°;其中扇形三圆心在Center下方1/8L处,半径为3/8L,弧度为120°;
若Loc=0则说明小脑蚓部凹陷在右侧,则扇形一在小脑蚓部图像左侧,扇形二、扇形三在小脑蚓部图像右侧;若Loc=1则说明小脑蚓部凹陷在左侧,则扇形一在小脑蚓部图像右侧,扇形二、扇形三在小脑蚓部图像左侧;最后将拟合图形三个扇形的弧线边链接作为小脑蚓部初始拟合轮廓,轮廓上的像素点即为小脑蚓部初始拟合轮廓点。
获取小脑蚓部精准轮廓时还包括:
首先确定小脑蚓部图像中心点Center
并在每条射线上以1/4D
再对新得到点集中每一个点进行判断,寻找与周围点相差较大的点,并进行校正,设定角度阈值T
由于采用了上述技术方案,本发明提供的一种胼胝体及小脑蚓部的一体化定位及分割方法,本方法只需要用户给出人脑超声图,即可得到所需的胼胝体及小脑蚓部位置信息以及分割出的胼胝体及小脑蚓部边缘轮廓,减少了日常生活中需要医生手工来定位及标记边缘轮廓的操作,从而减少一些由于人工失误导致的误差,使得准确性和效率提高,并且不需要有相应的医学技术就可以操作,并且占用内存较小,运行时间快。
附图说明
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
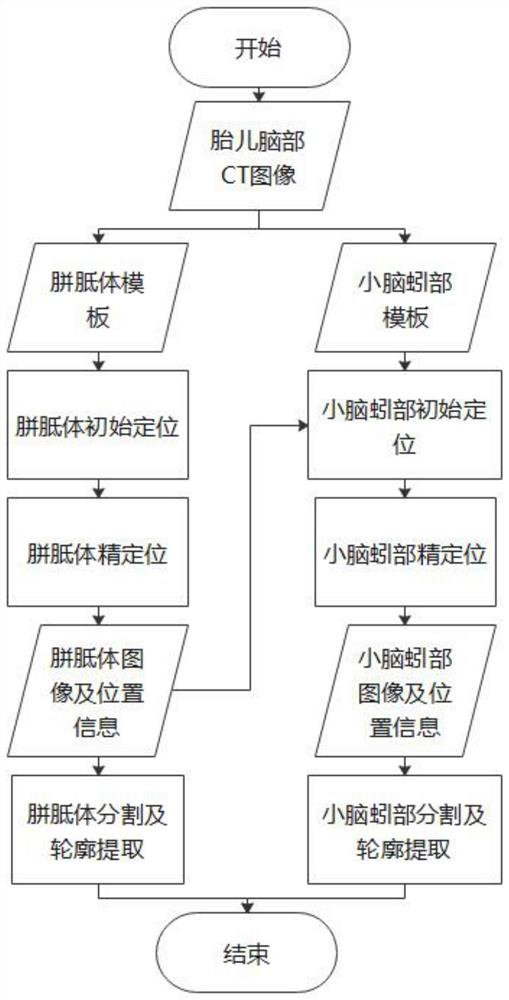
图1为本发明方法实现的流程图
图2为本发明中胼胝体定位与分割流程图
图3为本发明中小脑蚓部定位与分割流程图
图4为本发明中输入的人脑超声图像
图5为本发明中通过对抗神经网络生成的胼胝体平均模板图像
图6为本发明中通过对抗神经网络生成的小脑蚓部平均模板图像
图7为本发明中胼胝体初始搜索结果效果图
图8为本发明中胼胝体精搜索结果效果图
图9为本发明中胼胝体搜索结果检测后再进行搜索的效果图
图10为本发明中胼胝体轮廓分割效果图
图11为本发明中判断小脑蚓部方向位置信息过程图像
图12为本发明中小脑蚓部初始搜索结果效果图
图13为本发明中根据小脑蚓部初始搜索结果获取精搜索区域效果图
图14为本发明中小脑蚓部精搜索结果效果图
图15为本发明中小脑蚓部轮廓分割步骤图
图16为本发明中小脑蚓部轮廓分割结果图
具体实施方式
为使本发明的技术方案和优点更加清楚,下面结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚完整的描述:
如图1所示的一种胼胝体及小脑蚓部的一体化定位及分割方法,具体包括如下步骤:
S1:输入人脑超声图像如图4所示,对图像进行预处理,获得胼胝体初始搜索区域;
S2:分别输入胼胝体图像和小脑蚓部图像(从人脑超声图像手工切割获得),通过对抗神经网络生成胼胝体平均模板图像如图5所示及小脑蚓部平均模板图像,如图6所示。
S3:在人脑超声图像上,以S1得到的胼胝体初始搜索区域为搜索范围,以S2得到的胼胝体平均模板图像为搜索依据,进行模板尺寸自适应的滑动窗口搜索(以5像素为一个步长);将相似度前10%图像进行聚类得到胼胝体初始搜索结果,如图7所示。
S4:对S3得到胼胝体初始搜索区域进行扩充,得到胼胝体精搜索区域。以该区域为搜索范围,S2得到的胼胝体平均模板图像为搜索依据,再进行与S3相似的搜索及聚类操作,得到胼胝体精搜索结果,如图8所示。其中紫色矩形框为胼胝体精搜索区域,黄色矩形框为胼胝体精搜索结果)。
S5:对S4得到的胼胝体搜索结果进行检测,判断该结果对应人脑超声图像区域是否为胼胝体区域。若符合检测标准,则认为得到胼胝体最终搜索结果;若不符合标准,则在以S4所得精搜索结果区域为搜索范围,进行一次模板尺寸自适应的滑动窗口搜索,最终确定胼胝体位置,作为胼胝体最终搜索结果如图9所示。
S6:对S5得到的胼胝体区域进行主动轮廓模型算法迭代,分割胼胝体并得到其轮廓,如图10所示。
S7:根据S5得到的的超声图像中胼胝体图像位置信息,确定胼胝体几何中心点位置作为基准点Center;并根据人脑生理结构信息可以确定小脑蚓部位于胼胝体左下或右下位置(这里区分左右是因为拍摄超声图像的方向不同);框选出胼胝体左下与右下两个区域如图11所示,,分别求得两个矩形区域的像素均值,进行比较;选择像素均值较小的区域作为小脑蚓部初始搜索区域,并记录小脑蚓部相对胼胝体方向位置信息Loc(这里如果小脑蚓部在胼胝体左下方,则记Loc=0;如果小脑蚓部在胼胝体右下方,则记Loc=1)。
S8:在人脑超声图像上,以S7得到的小脑蚓部初始搜索区域为搜索范围,以S2得到的小脑蚓部平均模板图像为搜索依据,进行模板尺寸自适应的滑动窗口搜索(以5像素为一个步长);统计滑动窗口图像与模板图像的相似度比较结果,将相似度前10%的滑动窗口图像的中心点进行聚类;选取最大类所包含的点集的几何中心作为小脑蚓部初始搜索结果的中心,并以自适应后小脑蚓部平均模板尺寸作为小脑蚓部初始搜索结果的尺寸,如图12所示。
S9:在人脑超声图像中,以S7确定的基准点Center以及小脑蚓部初始搜索结果确定包含小脑蚓部的扇形范围区域(如图13所示);对该扇形区域进行图像增强处理,并获取其中的轮廓信息(这里的信息是点集形式);对点集进行筛选获取可能是小脑蚓部轮廓的点集,并取点集的外接矩形区域作为小脑蚓部精搜索的范围区域;以刚得到的小脑蚓部精搜索的范围为搜索区域,以S2得到的小脑蚓部平均模板图像为搜索依据,以S7中相同的搜索方式,采用新的相似度比较算法,进行自适应模板尺寸滑动窗口搜索,得到小脑蚓部精搜索结果,如图14所示。
S10:将S9得到的小脑蚓部区域从人脑超声图像中截取出来,得到小脑蚓部图像,并对该图像进行预处理;通过S7得到的方向信息Loc以及小脑蚓部本身的形态学特征,对其进行外轮廓图形拟合,得到小脑蚓部初始轮廓(这里是点集形式);对初始轮廓进行迭代得到小脑蚓部精确轮廓;再对精确轮廓进行平滑化处理(这里采用主动轮廓模型算法);最终得到小脑蚓部精准轮廓信息,如图15所示。
S1中具体采用如下方法:
S11:首先对输入的人脑超声图像进行预处理。将人脑超声图像转化为灰度图像,并进行二值化处理,将大于阈值(这里阈值为灰度图像像素均值)的像素点的值设为255,小于阈值的像素点的值设为0。再对二值图像进行开运算(这里开运算核尺寸为(10,10))与闭运算(这里闭运算核尺寸为(150,150)),得到预处理图像。
S12:计算S11得到的预处理图像中像素值为255的像素点占预处理图像像素点总数的比例Rate。统计预处理图像中像素值为255的像素点集,将点集进行K-means聚类,并计算最大类所包含的点集的几何中心点;通过人脑超声图像原始的长宽信息,及之前得到的Rate,自适应获取胼胝体初始搜索区域的长与宽;将之前得到的点集几何中心坐标作为胼胝体初始搜索区域的中心;通过长宽及中心点信息最终确定胼胝体初始搜索区域。
S2中具体采用如下方法:
对200张人脑超声图像手工分割,获得200张包含胼胝体区域的矩形图像,以及200张包含小脑蚓部区域的正方形图像;再对这两组图像分别进行降噪及增强处理;将这些图像转化成相同尺寸;再将处理后的图像带入对抗神经网络进行训练,分别得到一张包含胼胝体平均特征信息的矩形图像以及一张包含小脑蚓部平均特征信息的正方形图像。将这两张图像分别作为胼胝体搜索的平均模板图像以及小脑蚓部搜索的平均模板。
S3中具体采用如下方法:
S31:利用S12得到的比例参数Rate,对S2得到的胼胝体平均模板进行等比例缩放,将缩放后新的图像作为胼胝体搜索模板Tmp1。
S32:<1>在S12确定的胼胝体初始搜索区域范围内,对胼胝体进行滑动窗口搜索,具体操作如下:以5为步长从上至下,从左至右在搜索区域内截取与新模板图像同等大小的图像,将这些图像与模板图像Tmp1进行相似度比较(这里采用相关系数匹配算法),并将相似度在前10%的图像在搜索区域内对应的位置信息进行统计。
<2>将筛选出的图像的中心点坐标整合成一个点集,并对点集进行聚类(这里采用MeanShift算法进行聚类);将包含点个数最多的类筛选出来,并求得该类所有点的几何中心。
S33:以S32得到的几何中心点坐标作为胼胝体初始搜索结果在初始搜索区域内对应的中心点坐标;并以自适应变换后的胼胝体平均模板尺寸作为初始搜索结果对应的矩形区域的尺寸,最终得到胼胝体的初始搜索结果。
S4中具体采用如下方法:
S41:以S3得到的胼胝体初始搜索结果中心点为基准点,以初始搜索结果对应的矩形区域长宽的1.5倍为新的长宽,在人脑超声图像上以初始搜索结果区域扩展得到胼胝体精搜索区域,将该区域作为胼胝体进一步搜索的范围。
S42:<1>将S3得到的胼胝体初始搜索结果区域在人脑超声图像上单独切割出来,得到一个包含胼胝体的矩形图像;对该图像进行直方图均衡化处理及双边滤波处理,达到提高图像清晰度的目的。再对图像进行轮廓提取,具体操作如下:将处理后的图像转化为灰度图像并进行二值化;对二值化后的图像进行轮廓提取,并得到图像中的全部轮廓;找到这些轮廓中内部面积最大的轮廓作为胼胝体轮廓;将该轮廓外部素有像素点值转化为255,内部及轮廓上所有像素点值转化为0,这样便得到了在初始搜索后的胼胝体二值图像。
<2>根据上面操作得到的胼胝体二值图像,对图像中像素值为0的部分,即胼胝体部分进行形态学处理,并形成胼胝体骨骼,得到初始搜索后的胼胝体骨骼信息(这里是点集形式);再求出胼胝体骨骼对应的水平长度SkelLen。
<3>以上面得到的初始搜索结果对应的胼胝体骨骼水平长度SkelLen为胼胝体平局模板的长,对模板进行放缩,得到新的自适应胼胝体平均模板Tmp2。
S43:<1>在S41确定的胼胝体精搜索区域范围内,对胼胝体进行滑动窗口搜索,具体操作如下:以5为步长从上至下,从左至右在搜索区域内截取与新模板图像同等大小的图像,将这些图像与模板图像Tmp2进行相似度比较;这里采用了PSNR(峰值信噪比)、SSIM(结构相似性)、Cosine算法三种衡量标准作为相似度比较方法,即分别采用这三种相似度比较方式作为衡量标准,分别得到在这三种衡量标准下的相似度达到前10%的图像搜索位置,再将这些图像位置信息进行整合,形成一个同时包含这三准评判标准搜索位置的信息集合作为这轮搜索的最终集合,把搜索区域内所有满足条件的位置信息进行统计。
<2>将满足条件的位置的左上角点坐标汇总为点集P
S5中具体采用如下方法:
S51:将S4获得的胼胝体精搜索结果区域在人脑超声图像上单独切割出来,得到胼胝体图像,并在中心处对图像进行竖直分割,形成左右两张图像PicL和PicR。对图像PicR进行水平镜像翻转得到PicR′;对图像PicL和PicR′进行直方图均衡化处理,并对处理后的图像进行相似度比较(这里采用归一化相关系数匹配算法),并得到左右两张图的相似度值;
S52:<1>如果S51得到的相似度值大于阈值(这里阈值设为0.75),左右两张图像相似度较高,这就满足了胼胝体相对对称的形状特性,则认为S43得到的精搜索结果准确,可作为胼胝体最终搜索结果进行输出。如果S51得到的相似度值小于阈值(这里阈值设为0.75),左右两张图相似度不满足条件,则将S43所得胼胝体精搜索结果区域作为再次搜索区域进行最终搜索。
<2>胼胝体最终搜索以S43所得胼胝体精搜索结果区域为搜索范围,并将S42所得模板Tmp2进行等比例放缩(这里放缩系数为0.8)得到新胼胝体平均模板Tmp3。其他步骤与S43相同,经过在搜索范围内的滑动窗口搜索,得到胼胝体的最终搜索结果。
S6中具体采用如下方法:
将S5所得胼胝体最终搜索结果区域在人脑超声图像上单独切割出来,对该图像进行直方图均衡化;对所得图像进行主动轮廓模型算法迭代(这里使用SNAKE算法),最终得到胼胝体轮廓。
S7中具体采用如下方法:
S71:<1>根据S5得到的胼胝体位置信息,获得人脑超声图像中包含胼胝体的矩形框坐标,并以此求得该矩形框中心坐标作为基准点Center。
<2>因为人脑的生理结构特性,胼胝体位于大脑左右半球之间,小脑蚓部位于小脑区域,在胼胝体下方;又因为拍摄超声图像的过程中,人脑以左侧或右侧方向面向超声仪器,因此在人脑超声图像,会呈现小脑蚓部在胼胝体左下方或右下方的情况;为了判断小脑蚓部的方向信息,将胼胝体中心点横坐标作为两矩形框左边界(右边界)横坐标,以胼胝体区域下边界作为两矩形框上边界,以胼胝体的1.5倍长作为矩形框的长与宽,得到位于胼胝体下方的左右两个矩形区域。
S72:在S1预处理后的人脑超声图像上截取S71得到的左右两矩形区域图像,记为Pic
S73:根据S72得到的方向位置信息选择胼胝体左下侧图像Pic
S8中具体采用如下方法:
S81:根据S5获得的胼胝体尺寸信息,获得胼胝体宽度为W;再将S2得到的小脑蚓部平均模板图像(正方形图像)的边长转化为与胼胝体宽度相同,即W;得到的新尺寸小脑蚓部模板图像Tmp1即为接下来搜索所用模板图像;
S82:<1>在人脑超声图像上,以S33得到的小脑蚓部初始搜索区域为搜索范围,以S41得到的新小脑蚓部平均模板图像为搜索依据,进行滑动窗口搜索,具体操作如下:以5为步长从上至下,从左至右在搜索区域内截取与新模板图像同等大小的图像,将这些图像与模板图像Tmp3进行相似度比较(这里采用相关系数匹配算法),并将相似度在前10%的图像在搜索区域内对应的位置信息进行统计。
<2>将筛选出的图像的中心点坐标整合成一个点集,并对点集进行聚类(这里采用MeanShift算法进行聚类);将包含点个数最多的类筛选出来,并求得该类所有点的几何中心。
S83:以S82得到的几何中心点坐标作为小脑蚓部初始搜索结果在初始搜索区域内对应的中心点坐标,记为Center2;并以自适应变换后的小脑蚓部平均模板尺寸作为初始搜索结果对应的矩形区域的尺寸。最终得到小脑蚓部的初始搜索结果。
S9中具体采用如下方法:
S91:<1>在人脑超声图像中,将S8确定的基准点Center为圆心,以S5得到的胼胝体长L的1.5倍长度为半径长度,在人脑超声图像中画圆。并以圆心Center与S83得到的小脑蚓部初始搜索结果中心点Center2连线为基准线;以圆心为轴点,将基准线分别顺时针及逆时针旋转20°,则在以Center为圆心、1.5L为半径的圆上扫过了一个弧度为40°的扇形区域。
<2>对该扇形区域进行图像增强处理,并获取其中的轮廓信息(这里的信息是点集形式);对这些轮廓点进行筛选,具体操作如下:以每个轮廓点(X
S92:<1>对S81中得到的模板图像Tmp3进行等比例放缩(这里方所比例为:0.8,0.9,1.1,1.2);得到包括Tmp3模板在内的五个不同尺寸小脑蚓部平均模板。
<2>在S91确定的小脑蚓部精搜索区域范围内,对小脑蚓部进行滑动窗口搜索,具体操作如下:以5为步长从上至下,从左至右在搜索区域内分别截取与刚得到的5个新模板图像同等大小的图像,将这些图像与模板图像进行相似度比较;这里采用了PSNR(峰值信噪比)、SSIM(结构相似性)、Cosine算法三种衡量标准作为相似度比较方法,即分别采用这三种相似度比较方式作为衡量标准,分别得到在这三种衡量标准下的相似度达到前10%的图像搜索位置,再将这些图像位置信息进行整合,形成一个同时包含这三准评判标准搜索位置的信息集合作为这轮搜索的最终集合,把搜索区域内所有满足条件的位置信息进行统计。
<2>将满足条件的位置的左上角点坐标汇总为点集P
如图15和图16所示,S10中具体采用如下方法:
S10.1:将S92得到的小脑蚓部区域从人脑超声图像中截取出来,得到小脑蚓部图像;将小脑蚓部图像转化为灰度图像;对灰度图像进行直方图均衡化处理及双边滤波处理,得到预处理后的小脑蚓部图像。
S10.2:<1>通过S72得到的方向信息Loc以及小脑蚓部本身的形态学特征,对其进行外轮廓图形拟合,具体操作如下:根据小脑蚓部本身的形态学特征,可知小脑蚓部形状近似为圆,同时一侧在纵向1/2处延水平方向向内凹陷约1/3半径距离。所以,首先通过方向信息Loc判断小脑蚓部凹陷方向,再以小脑蚓部图像中心点为圆心Center3,扇形区域拟合小脑蚓部:其中扇形1圆心坐标与Center3坐标相同,半径为脑蚓部图像边长的1/2,记为1/2L,弧度为180°;其中扇形2圆心在Center3上方1/8L处,半径为3/8L,弧度为120°;其中扇形3圆心在Center3下方1/8L处,半径为3/8L,弧度为120°。若Loc=0则说明小脑蚓部凹陷在右侧,则扇形1在小脑蚓部图像左侧,扇形2、3在小脑蚓部图像右侧;若Loc=1则说明小脑蚓部凹陷在左侧,则扇形1在小脑蚓部图像右侧,扇形2、3在小脑蚓部图像左侧;最后将拟合图形三个扇形的弧线边链接作为小脑蚓部初始拟合轮廓,轮廓上的像素点即为小脑蚓部初始拟合轮廓点。
<2>确定小脑蚓部图像中心点Center
并在每条射线上以1/4D
再对新得到的点集中每一个点进行判断,寻找与周围点相差较大的点,并进行校正,以达到平滑点集的目的,具体操作如下(以点集中一点P举例说明):
①设定角度阈值T
②取所有由前后三个分割点组成的矢量夹角的补角的平均值作为角度阈值,即
其中
③取0.75倍的所有到中心点弦高(距离)的平均值(即0.75倍的样本标准偏差)作为弦高阈值,即
④对于一圈360个点中相邻的两个点S
⑤如果每点到中心的距离大于T
通过以上方法对点集Pset'
为了得到更加精确的小脑蚓部轮廓,本文采用以上方法对所得结果进行迭代。对已得到的轮廓点集Pset'
Pset'
S10.3:对精确轮廓进行平滑化处理(这里采用主动轮廓模型算法),最终得到小脑蚓部精准轮廓信息。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种胼胝体及小脑蚓部的一体化定位及分割方法
- 一种超声图像中小脑蚓部的定位及分割方法