逐次逼近式模拟数字转换器系统
文献发布时间:2023-06-19 09:41:38
技术领域
本发明涉及芯片技术领域,具体地涉及一种逐次逼近式模拟数字转换器系统。
背景技术
传统提高模拟数字转换器无杂散动态范围(Spurious Free Dynamic range,SFDR)的方法包括数字校准,增大量化单元面积和加入抖动(Dither)技术。数字校准技术需要复杂的数字电路控制,并且校准数目多,需要时间长,硬件成本大;增大量化单元的面积,可以有效的降低电容等元器件的工艺误差,但是面积增大会直接增大电路的生产成本;相比前面两种,Dither校准技术可以用简单的控制逻辑和极少的面积成本实现大幅度的SFDR提升。故此,Dither技术逐渐成为人们的研究热点。
传统的Dither技术框架图如图1所示。工作流程为:
1.引入Dither器根据伪随机发生器的信号,将输入信号加上Dither值V
2.信号叠加后,模拟数字转换器(Analog to digital converter,ADC)采样,比较,量化,输出数字信号值。
3.消除Dither器在数字域根据伪随机发生器的信号消除加入的V
4.输出信号。
上述传统加入Dither技术提高模拟数字转换器SFDR的方法,存在的问题在于:
1.实现复杂:Dither信号在模拟域加入,在数字域除去,需要精确的控制ADC的采样状态和最后输出时的数字减法运算。
2.牺牲ADC本身的精度:由于在ADC采样前就引入了Dither信号,所以输入信号的摆幅就被压缩,ADC本身的最高量化精度被限制。
3.额外误差:加入模拟Dither信号和减去的数字Dither不是完全一样,有额外误差。
4.抖动范围小:仅有一次抖动,随机性和抖动范围小,SFDR提升范围小。
发明内容
本发明实施例的目的是提供一种逐次逼近式模拟数字转换器系统,该逐次逼近式模拟数字转换器系统至少可以解决上述问题,可以更好提高无杂散动态范围。
为了实现上述目的,本发明实施例提供一种逐次逼近式模拟数字转换器系统,该逐次逼近式模拟数字转换器包括第一电容组、第二电容组、比较器以及数字控制电路,所述第一电容组和所述第二电容组具有对应相同的多个电容,该系统包括:引入抖动器和消除抖动器,其中,所述引入抖动器连接在所述第一电容组和所述数字控制电路之间,用于根据所述比较器的输出信号以及所述数字控制电路输出的第一随机信号,输出控制信号控制所述第一电容组的第K个电容的下极板,以在所述第一电容组的第K个电容处引入抖动;所述消除抖动器连接在所述第二电容组和所述数字控制电路之间,用于根据所述比较器的输出信号以及所述数字控制电路输出的第二随机信号,输出控制信号控制所述第二电容组的第K+1个电容的下极板,以在所述第二电容组的第K+1个电容处消除抖动。
优选地,所述引入抖动器包括:第一异或门,以所述比较器的输出信号和所述数字控制电路输出的第一随机信号作为输入,并输出经异或计算的信号。
优选地,所述消除抖动器包括:第二异或门,以所述比较器的输出信号和所述数字控制电路输出的第二随机信号作为输入,并输出经异或计算的信号。
优选地,所述引入抖动器还包括:第一触发器,以所述第一异或门输出的经异或计算的信号以及所述数字控制电路输出的时序控制信号作为输入,并输出控制所述第一电容组的电容的下极板的控制信号。
优选地,所述消除抖动器还包括:第二触发器,以所述第二异或门输出的经异或计算的信号以及所述数字控制电路输出的时序控制信号作为输入,并输出控制所述第二电容组的电容的下极板的控制信号。
优选地,所述消除抖动器还包括:延时器,用于使所述消除抖动器延时输出控制所述第二电容组的电容的下极板的控制信号。
优选地,所述数字控制电路在输出所述第一随机信号之后延时输出所述第二随机信号。
优选地,所述第一随机信号或所述第二随机信号为0或1。
优选地,在所述第一随机信号或所述第二随机信号为0时,所述第一异或门或所述第二异或门直接输出所述比较器的输出信号,在所述第一随机信号或所述第二随机信号为1时,所述第一异或门或所述第二异或门将所述比较器的输出信号取反后输出。
优选地,所述第K+1个电容的值是所述第K个电容的值的二分之一。
通过上述技术方案,采用本发明提供的逐次逼近式模拟数字转换器系统,该系统包括:引入抖动器和消除抖动器,其中,所述引入抖动器连接在所述第一电容组和所述数字控制电路之间,用于根据所述比较器的输出信号以及所述数字控制电路输出的第一随机信号,输出控制信号控制所述第一电容组的第K个电容的下极板,以在所述第一电容组的第K个电容处引入抖动;所述消除抖动器连接在所述第二电容组和所述数字控制电路之间,用于根据所述比较器的输出信号以及所述数字控制电路输出的第二随机信号,输出控制信号控制所述第二电容组的第K+1个电容的下极板,以在所述第二电容组的第K+1个电容处消除抖动。本发明可以解决上述现有技术存在的各个问题。
本发明实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
附图是用来提供对本发明实施例的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本发明实施例,但并不构成对本发明实施例的限制。在附图中:
图1是现有技术的结构示意图;
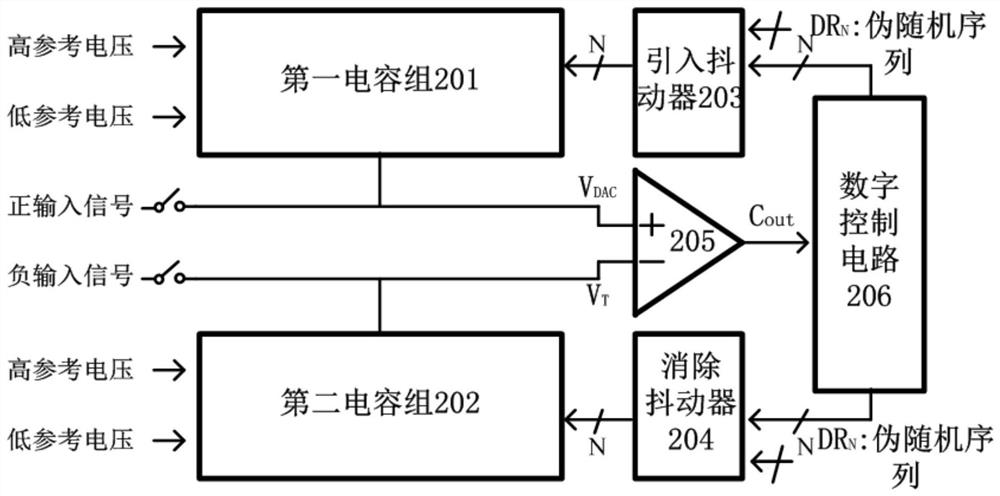
图2是本发明一实施例提供的逐次逼近式模拟数字转换器系统的结构示意图;
图3是本发明一实施例提供的引入抖动器的结构示意图;
图4是本发明一实施例提供的消除抖动器的结构示意图;
图5是本发明一实施例提供的逐次逼近式模拟数字转换器系统与现有技术相比的效果示意图。
附图标记说明
201 第一电容组 202 第二电容组
203 引入抖动器 204 消除抖动器
205 比较器 206 数字控制电路
301 第一异或门 302 第一触发器
401 第二异或门 402 第二触发器
具体实施方式
以下结合附图对本发明实施例的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明实施例,并不用于限制本发明实施例。
图2是本发明一实施例提供的逐次逼近式模拟数字转换器系统的结构示意图。如图2所示,该逐次逼近式模拟数字转换器包括第一电容组201、第二电容组202、比较器205以及数字控制电路206,所述第一电容组201和所述第二电容组202具有对应相同的多个电容,该系统包括:引入抖动器203和消除抖动器204,其中,所述引入抖动器203连接在所述第一电容组201和所述数字控制电路206之间,用于根据所述比较器205的输出信号以及所述数字控制电路206输出的第一随机信号,输出控制信号控制所述第一电容组201的第K个电容的下极板,以在所述第一电容组201的第K个电容处引入抖动;所述消除抖动器204连接在所述第二电容组202和所述数字控制电路206之间,用于根据所述比较器205的输出信号以及所述数字控制电路206输出的第二随机信号,输出控制信号控制所述第二电容组202的第K+1个电容的下极板,以在所述第二电容组202的第K+1个电容处消除抖动。
首先,可以理解的是,所述第一电容组201和所述第二电容组202可以分别包括理论电容值依次翻倍的多个电容。例如,第一电容组201可以包括电容Cp1-Cpn,共n个电容,其中理论电容比Cp1:Cp2:Cp3……Cpn为2n-1……4:2:1。第二电容组202可以包括电容Cn1-Cnn,共n个电容,其中理论电容比Cn1:Cn2:Cn3……Cnn为2n-1……4:2:1。
该逐次逼近式模拟数字转换器的工作原理简单介绍如下:首先使用翻转后产生电压可能最接近输入信号的电压的一个电容翻转,例如第K个电容翻转,与输入信号的电压对比,如果小于输入信号电压,则翻转第K+1个电容(电容值为第K个电容的二分之一),再进行对比,如果产生的电压仍小于输入信号的电压,则再翻转第K+2个电容(电容值为第K+1个电容的二分之一),如此逐次逼近翻转,从而最后可以量化输入信号的电压。
在上述原理的基础上,以下详细描述本发明的工作过程:
首先,采样时,在数字控制电路206控制下,第一电容组201所有电容上极板接正输入信号,所有电容下极板接负输入信号,第二电容组202所有电容上下极板接中间电压(即共模电压)。
接着,采样结束后,第一电容组201和第二电容组202的上极板都与输入信号断开,第一电容组201和第二电容组202的下极板都接中间电压。之后,比较器205开始第一次比较。
接着,根据第一随机信号和第二随机信号(多个第一随机信号和多个第二随机信号分别形成伪随机序列DR
引入dither的过程:此时第一随机信号为1,dither引入。在第K电容处,比较器205结果C
消除dither的过程:第一电容组201的随机翻转通过第二电容组202的相应翻转来消除。如果第一电容组201在第K位(第K个电容)引入dither,第二电容组202必须要在第K+1个电容处消除dither。比较器205结果C
上文说明了一次dither完整过程中的引入dither和消除dither。一个采样信号的N位量化包括N次比较,则可以进行N次引入dither和消除dither。优选地,在第一次比较时不引入dither(即从第二次比较时引入dither),有助于系统的稳定运行。
可以理解的是,数字控制电路206可以在输出第一随机信号之后延时输出第二随机信号,以使得引入dither发生在第一电容组201的第K个电容,而消除dither发生在第二电容组202的第K+1个电容。
图3是本发明一实施例提供的引入抖动器的结构示意图。如图3所示,所述引入抖动器203包括:第一异或门301,以所述比较器205的输出信号和所述数字控制电路206输出的第一随机信号作为输入,并输出经异或计算的信号。
所述引入抖动器203还包括:第一触发器302,以所述第一异或门301输出的经异或计算的信号以及所述数字控制电路206输出的时序控制信号作为输入,并输出控制所述第一电容组201的电容的下极板的控制信号。
引入抖动器203的输入信号为比较器205的输出C
图4是本发明一实施例提供的消除抖动器的结构示意图。如图4所示,所述消除抖动器204包括:第二异或门401,以所述比较器205的输出信号和所述数字控制电路206输出的第二随机信号作为输入,并输出经异或计算的信号。
所述消除抖动器204还包括:第二触发器402,以所述第二异或门401输出的经异或计算的信号以及所述数字控制电路206输出的时序控制信号作为输入,并输出控制所述第二电容组202的电容的下极板的控制信号。
类似的,消除抖动器204的输入信号为比较器205的输出C
如果数字控制电路206不具有延时输出第二随机信号DR
本发明实施例具有以下优势:
1.Dither信号在模拟域加入,同样在模拟域消除,不影响输出的数字信号。
2.在ADC采样后,即比较器进行比较后才引入Dither信号,防止输入信号的摆幅被压缩,ADC本身的最高量化精度被限制的问题,也不影响输入信号的摆幅。
3.引入的Dither信号和消除的Dither信号同样是模拟域的信号,不存在模拟域和数字域的Dither信号不同的问题,误差小。
4.可以在多次甚至在每一次量化时都引入Dither信号,随机性和抖动范围大,SFDR提升范围大。
图5是本发明一实施例提供的逐次逼近式模拟数字转换器系统与现有技术相比的效果示意图。如图5所示,
本发明技术方案有益效果在于:和传统提高模拟数字转换器SFDR的方法相比,本技术在不影响输入信号摆幅的前提下,解决了加入抖动量范围小的问题,极大程度提高了逐次逼近模拟数字转换器的无杂散动态范围。该技术结构简单,功耗低,运用在高精度SARADC中在一定程度上可以提高产品的良品率。经MATLAB实验仿真,在电容失配标准差为0.05时,使用本方法9位逐次逼近模拟数字转换器的SFDR最高可以提升16dB。
对比差分输入Monotonic ADC,同时固定上侧失配电容,下侧电容按失配标准差0.05随机产生1000组电容阵列,计算1000组两种ADC的SFDR。多值抖动ADC的SFDR的均值比Monotonic ADC的均值高5.35dB。
通过上述技术方案,采用本发明提供的逐次逼近式模拟数字转换器系统,该系统包括:引入抖动器和消除抖动器,其中,所述引入抖动器连接在所述第一电容组和所述数字控制电路之间,用于根据所述比较器的输出信号以及所述数字控制电路输出的第一随机信号,输出控制信号控制所述第一电容组的第K个电容的下极板,以在所述第一电容组的第K个电容处引入抖动;所述消除抖动器连接在所述第二电容组和所述数字控制电路之间,用于根据所述比较器的输出信号以及所述数字控制电路输出的第二随机信号,输出控制信号控制所述第二电容组的第K+1个电容的下极板,以在所述第二电容组的第K+1个电容处消除抖动。本发明可以解决上述现有技术存在的各个问题。
还需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、商品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、商品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括要素的过程、方法、商品或者设备中还存在另外的相同要素。
以上仅为本申请的实施例而已,并不用于限制本申请。对于本领域技术人员来说,本申请可以有各种更改和变化。凡在本申请的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本申请的权利要求范围之内。
- 逐次逼近式模拟数字转换器的电容阵列校正系统和方法
- 逐次逼近式模拟数字转换器系统