平单轴跟踪系统的跟踪角度优化方法及其跟踪支架
文献发布时间:2023-06-19 09:41:38
技术领域
本发明涉及太阳能电池安装支架的智能跟踪系统,尤其涉及一种平单轴跟踪系统的跟踪角度优化方法及其跟踪支架,属于太阳能电池安装技术领域。
背景技术
光伏电站安装中,有固定支架安装和跟踪支架安装两种形式,其中,平单轴跟踪支架系统由于发电量高、成本相对低、占地面积相对小,综合成本和发电量经济分析更具有投资价值。同时由于双面光伏组件技术的快速发展,双面光伏组件产品得到快速应用和逐步扩大的市场,双面光伏发电组件与单轴跟踪支架结合使用具有 1+1>2的叠加效果,市场的接受和应用呈现快速的增长。而跟踪支架系统的核算是控制跟踪角度的算法,因此,进行相关产品的开发及跟踪角度算法优化具有实际的研究意义及广泛的应用前景。
目前,光伏跟踪系统的主要跟踪算法仍是以传统的天文算法计算的角度进行视日跟踪。视日跟踪即根据地理信息及时间计算太阳高度角和太阳方位角,进而得到太阳光线在与轴向垂直平面上的投影,从而得到跟踪角度。通过实验及研究发现,不同的天气条件如多云、阴天、晴朗下的直射光、散热光、地表反射率对光伏跟踪系统的发电量有较大差异影响,尤其对于背面可以发电的双面组件影响更大,而实际应用中由于不同地区的气象天气会有显著不同,传统单一的天文算法不能更好的满足应用的需求,复杂气象条件下的光伏跟踪系统的发电量还有优化提升空间。
发明内容
本发明的目的是针对上述问题,提供平单轴跟踪系统的跟踪角度优化方法及其跟踪支架,优化现有跟踪支架的跟踪策略,使支架的跟踪角度达到最优,最终提升光伏跟踪系统的系统发电量,增加系统收益。
为此,本发明采用如下技术方案:
一种平单轴跟踪系统的跟踪角度优化方法,所述平单轴跟踪系统包括若干排跟踪支架,跟踪支架上形成安装光伏组件的第一安装平面,所述第一安装平面上安装有光伏组件,跟踪支架的初始跟踪角度A0通过天文算法计算获得,跟踪支架优化后的下一刻最终执行跟踪角度A0n通过下述步骤计算获得:
S 1:在所述跟踪支架的端部或中间部位设置K个不同角度的测试安装平面,在所述测试安装平面上安装有小电池片组件和/或辐照表;
S2:实时收集小电池片组件和/或辐照表实时收集小组件电流值和/或辐照值,得到同一时刻的K个电流值和/或辐照值,取最大的电流值Imax和/或辐照值Emax的小电池片组件和/或辐照表所在的测试安装平面的安装角度A1';
S3:设定判断基准值X,X>0;设定角度偏差基准值θ,θ>0;跟踪支架下一步通过天文算法计算获得的跟踪角度为A1;根据设定的跟踪角度寻优策略计算得出跟踪支架优化后的下一刻最终执行跟踪角度A01;
S4:重复步骤S1-S3,依次计算得到跟踪支架优化后的再下一刻最终执行跟踪角度A02,A03,A03......A0n。
进一步地,所述跟踪角度寻优策略为:
①当A1>A0,A1’≥A0时:
若A1’-A1>X,则下一刻最终执行跟踪角度取A01=Max (A0+θ,A1);
若0<A1’-A1<X,则下一刻最终执行跟踪角度取A01=A1;
若-X<A1’-A1<0,则下一刻最终执行跟踪角度取A01=A1;
若A1’-A1<-X,则下一刻最终执行跟踪角度取A01=Max (A0+θ,A1’);
②当A1>A0,A1’<A0时:
若-X<A1’-A0<0,则下一刻最终执行跟踪角度取A01=A0,不做调整;
若A1’-A0<-X,则下一刻最终执行跟踪角度取A01=A0-θ;
③当A1<A0,A1’≥A0时:
若0<A1’-A0<X,则下一刻最终执行跟踪角度取A01=A0,不做调整;
若A1’-A0>X,则下一刻最终执行跟踪角度取A01=A0+θ;
④当A1<A0,A1’<A0时:
若A1’-A1<-X,则下一刻最终执行跟踪角度取A01=Min (A0-θ,A1);
若-X<A1’-A1<0,则下一刻最终执行跟踪角度取A01=A1;
若0<A1’-A1<X,则下一刻最终执行跟踪角度取A01=A1;
若A1’-A1>X,则下一刻最终执行跟踪角度取A01=Max (A0-θ,A1’)。
进一步地,所述跟踪支架上设置的K个不同角度的测试安装平面的安装角度与第一安装平面的角度差值△固定且可随跟踪支架转动;相邻两个测试安装平面的安装角度的差值△也固定。
进一步地,所述△的取值为2-5°。
进一步地,所述判断基准值X的取值为2-8°。
进一步地,所述角度偏差基准值θ的取值为2-8°。
本发明的另一方面,还提供一种平单轴跟踪系统的跟踪支架, 所述跟踪支架上形成安装光伏组件的第一安装平面,在所述跟踪支架的端部或中间部位设置K个不同角度的测试安装平面,在所述测试安装平面上安装有小电池片组件和/或辐照表。
进一步地,所述跟踪支架上设置的K个不同角度的测试安装平面的安装角度与第一安装平面的角度差值△固定且可随跟踪支架转动;相邻两个测试安装平面的安装角度的差值△也固定。
进一步地,所述△的取值为2-5°。
与现有技术相比,本发明的有益效果在于:
在传统天文算法的基础上,通过在传动的跟踪支架中设置不同安装角度的测试安装平面,并在该些测试安装平面上安装小型监测组件或/或辐照表,获得同一时刻中不同安装角度下的光伏组件的电流信息或辐照信息,进而通过设定的跟踪角度寻优策略,获得跟踪支架优化后的下一刻最终执行跟踪角度,最终提升光伏跟踪系统的系统发电量,增加系统收益。
本发明的跟踪角度优化方法,只需要在原有的跟踪支架系统中,增加一些小型测试组件、辐照表或简易辐照计,可适用于现有的各类跟踪支架系统,在成本增加不大的前提下,获得最优的系统发电量,适用范围广,具有广阔的应用前景。
本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
附图说明
图1是本发明中跟踪支架系统不同安装面角度示意及由东向西跟踪过程变化示意图;
图2a、2b为本发明中跟踪支架跟踪角度的一个示例;
图3为本发明中跟踪支架跟踪角度的又一个示例;
图4为本发明中跟踪支架跟踪角度的又一个示例;
图5a、5b为本发明中跟踪支架跟踪角度的又一个示例;
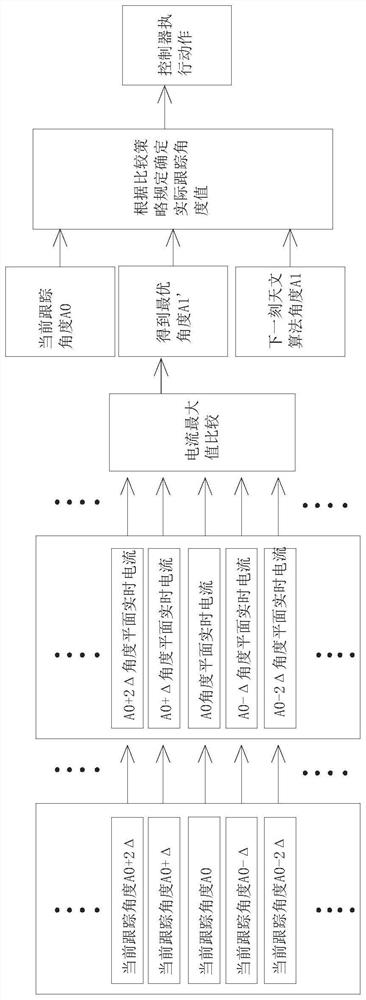
图6是本发明中采用不同角度上组件电流值比较确定最优跟踪角的流程框图;
图7是本发明中采用不同角度上辐照比较确定最优跟踪角的流程框图。
具体实施方式
下面结合附图对本发明进行进一步说明。
本发明的跟踪角度优化方法适用于平单轴跟踪系统,平单轴跟踪系统为现有技术,一般包括若干排平单轴跟踪支架,跟踪支架上形成安装光伏组件的第一安装平面,所述第一安装平面上安装有光伏组件,跟踪支架的跟踪角度决定了第一安装平面上光伏组件的安装角度;在本申请中,将在同一概念下使用跟踪支架的跟踪角度、第一安装平面的角度以及第一安装平面上光伏组件的安装角度。
首先,将光伏电站中的跟踪支架系统进行优化设计,在可安装一长串光伏组件的单排跟踪支架的端部或中间部位设计K个不同角度的测试安装平面,K为大于2的整数;这些测试安装平面会跟随跟踪支架的主旋转轴进行旋转,保持与主轴安装面,即第一安装平面角度固定的差值角度,如图1中所示。在这些不同角度的测试安装平面上分别安装小型电池片组件或辐照表,实时进行不同角度所在测试安装平面上小组件电流或辐照的监测,从而比较得到最佳角度。具体地:
设定跟踪支架系统的跟踪角度由朝东方向跟随太阳逐步向西转动,跟踪支架的跟踪角度定义为由朝东极限位置-60°向朝西极限位置+60°方向转动,放平状态时为0°。根据下述跟踪角度寻优策略,获得跟踪支架的下一时刻的跟踪角度,即跟踪支架优化后的下一刻最终执行跟踪角度A0n。
首先,对一些字母代码设定如下:
A0为当前时刻的跟踪角度,A01为下一刻最终跟踪角度,再下一刻最终跟踪角度依次为A02,A03…A0n;
A1’为通过当前角度A0和其它不同正偏移、负偏移角度(A0+ △,A0+2△……,A0-△,A0-2△,……)下的辐照实时监测选择出的当前时刻下的最优角度,可以作为下一时刻跟踪角度的选择之一;
A1为下一刻天文算法计算的跟踪角度,随后依次为A2,A3…An,An取值为跟踪角度范围-60°~60°;
X为判断基准值,为某正角度值,可根据需要取值为3°,5°, 8°…等;
θ为角度偏差基准值,为某正角度值,可根据需要取值为3°, 5°,8°…等;
跟踪系统跟踪过程中,跟踪角度按照如下约定的策略进行角度寻优,首次启动跟踪时A0角度为依照天文算法获得的角度:
(一)、当A1>A0,A1’≥A0时,即图2a,图2b所示的两种状态,此时:
若A1’-A1>X,则下一刻最终执行跟踪角度取A01=Max (A0+θ,A1);
若0<A1’-A1<X,则下一刻最终执行跟踪角度取A01=A1;
若-X<A1’-A1<0,则下一刻最终执行跟踪角度取A01=A1;
若A1’-A1<-X,则下一刻最终执行跟踪角度取A01=Max (A0+θ,A1’)
(二)、当A1>A0,A1’<A0时,即图3所示的状态时,此时:
若-X<A1’-A0<0,则下一刻最终执行跟踪角度取A01=A0,不做调整;
若A1’-A0<-X,则下一刻最终执行跟踪角度取A01=A0-θ;
(三)、当A1<A0,A1’≥A0时,即图4所示的状态,此时:
若0<A1’-A0<X,则下一刻最终执行跟踪角度取A01=A0,不做调整;
若A1’-A0>X,则下一刻最终执行跟踪角度取A01=A0+θ;
(四)、当A1<A0,A1’<A0时,即图5a,5b所示的状态,此时:
若A1’-A1<-X,则下一刻最终执行跟踪角度取A01=Min (A0-θ,A1);
若-X<A1’-A1<0,则下一刻最终执行跟踪角度取A01=A1;
若0<A1’-A1<X,则下一刻最终执行跟踪角度取A01=A1;
若A1’-A1>X,则下一刻最终执行跟踪角度取A01=Max (A0-θ,A1’)。
通过如上约定进行下一刻最终执行跟踪角度A01的确定,确定后跟踪系统跟踪到该角度后,此时当前角度A0即为A01,如此根据程序和上述约定进行下一刻跟踪角度的寻优。
为了对本发明进行更进一步详细的说明,下文将进行进一步详细的描述:
实施例1:
本实施例利用监测组件电流进行最优角度的比较选择,通过电流检测装置或IV测试装置实现。
本实施例中取△值为3°,取X值和θ值均取5,则如图6 所示,跟踪支架的跟踪角度寻优测量的步骤如下:
首次启动时,A0为天文算法确定的跟踪支架的初始跟踪角度,在所述跟踪支架的端部或中间部位设置5个不同角度的测试安装平面,测试安装平面的角度分别为A0和A0+3°, A0+6°,A0-3°,A0-6°,在上述5个不同角度的测试安装平面上安装有小电池片组件;实时监测上述5个测试安装平面上的小电池片组件的电流信息。
跟踪支架优化后的下一刻最终执行跟踪角度A01通过下述步骤计算获得:
比较不同角度测试安装平面上小电池片组件的电流大小,选择电流值最大的小电池片组件所在的测试安装平面,该测试安装平面的角度即为最优角度之一A1’,结合天文算法下一刻的运算角度A1进一步判断:
第一种情况,当A1>A0,A1’≥A0时:
若A1’-A1>5,则下一刻最终执行跟踪角度取A01=Max (A0+5,A1);
若0<A1’-A1<5,则下一刻最终执行跟踪角度取A01=A1;
若-5<A1’-A1<0,则下一刻最终执行跟踪角度取A01=A1;
若A1’-A1<-5,则下一刻最终执行跟踪角度取A01=Max (A0+5,A1’)
第二种情况,当A1>A0,A1’<A0时:
若-5<A1’-A0<0,则下一刻最终执行跟踪角度取A01=A0,不做调整;
若A1’-A0<-5,则下一刻最终执行跟踪角度取A01=A0-5;
第三种情况,当A1<A0,A1’≥A0时:
若0<A1’-A0<5,则下一刻最终执行跟踪角度取A01=A0,不做调整;
若A1’-A0>5,则下一刻最终执行跟踪角度取A01=A0+5;
第四种情况,当A1<A0,A1’<A0时:
若A1’-A1<-5,则下一刻最终执行跟踪角度取A01=Min (A0-5,A1);
若-5<A1’-A1<0,则下一刻最终执行跟踪角度取A01=A1;
若0<A1’-A1<5,则下一刻最终执行跟踪角度取A01=A1;
若A1’-A1>5,则下一刻最终执行跟踪角度取A01=Max (A0-5,A1’)。
通过如上约定进行下一刻最终执行跟踪角度A01的确定,确定后跟踪系统跟踪到该角度后,此时当前角度A0即为A01,从而其它角度面变为新的角度值A0+3°,A0+6°,A0-3°,A0-6°,如此根据程序和上述约定循环进行下一刻跟踪角度的寻优。
实施例2:
如图7所示,本实施例与实施例1的不同之处在于:本实施例利用监测组件辐照度进行最优角度的比较选择,可以通辐照表或简易辐照计实现。通过实时监测K个测试安装平面上的辐照值信息,并比较不同角度测试安装平面的辐照值的大小,选择辐照值最大的测试安装平面,该测试安装平面的角度即为最优角度之一A1’,最后根据设定的跟踪角度寻优策略计算得出跟踪支架优化后的下一刻最终执行跟踪角度A01,A02,A03.....A0n。
本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神。
- 平单轴跟踪系统的跟踪角度优化方法及其跟踪支架
- 一种跟踪支架的跟踪角度优化方法及系统