一种架空轨道式智能无人传菜控制系统
文献发布时间:2023-06-19 09:43:16
技术领域
本发明涉及智能传菜技术领域,尤其是涉及一种架空轨道式智能无人传菜控制系统。
背景技术
随着社会经济的快速发展,人民生活水平的提高,餐饮业显得越来越繁荣,但繁荣之下的行业竞争也更加激烈,特别是社会就业环境的不断提升,餐饮业人力资源也越来越紧张,餐饮行业人员流动性高的特点也一直难以克服,人力成本也在逐年攀升,人力成本占据了餐饮企业成本的重要一部分,其深层的人力和管理成本难以估量。
随着智能餐厅的出现,在一定程度上缓解了上述人力成本等问题。然而,现有的智能餐厅一般采用在地面行驶的传菜车进行智能传菜,即通过磁条导航、激光导航、二维码惯性导航等方式在地面行走,将菜品从厨房送至餐桌,这种送餐方式在传菜时存在如下几点缺陷:1、在餐厅的地面上行走会受餐厅地面设有的餐桌等物品的制约,需要绕过餐桌等物品规划,进而导致行走路线曲折,影响送餐速度;2、各机器人行走路线不可避免会产生交叉,在线路繁忙时,可能各条线路均有机器人在行走,为避免在各交叉路口发生撞车,必然需要一个机器人先走,其它机器人暂停,进而影响了送餐的速度;3、机器人所行走线路会有顾客或服务人员行走,特别是小孩的走动,为了安全,机器人遇到人时会执行避障动作,周边行人比较多时还会执行停止行走指令,影响到机器人的行走步伐,经常被迫暂停或进行避障动作,会严重影响到传菜的速度,同时,由于控制系统存在一定的滞后性,顾客与行走机器人之间也时有发生碰撞,存在一定的危险性;4、传菜过程中菜品所处位置无法调整,因此在菜品传输至目标餐桌后,顾客仍存在需离开位置才能取下菜品的问题,致使顾客体验不佳。
中国专利ZL201821254229.8公开了一种智能轨道传菜系统,其采用架空轨道送餐方式,然而,在复杂的餐厅应用时,需要配置较多轨道和专用的转轨装置,轨道布局复杂,工程投入较大,单一轨道通行率低,多辆传菜车调度运行效率低。此外,该专利的传菜车在运行时,特别是机器人经过转弯轨道时,机器人下挂载物箱体会不断产生惯性晃动,容易使菜品汤汁从菜盘中溢出,轨道构建复杂,需要配置专用转轨装置,这种单一布局大的轨道在前方餐桌上方传菜车正在执行传菜动作时,后方机器人只能在后面等待,无法越过前方传菜车,传菜效率较低。
发明内容
本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种架空轨道式智能无人传菜控制系统,该系统根据主轨、支轨的延伸作用,使得传菜功能更加灵活,传菜车通行效率更高。
本发明的目的可以通过以下技术方案来实现:
一种架空轨道式智能无人传菜控制系统,包括架设在餐厅和厨房的楼层板下方的架空轨道,设于架空轨道上并可沿其移动的多台传菜车,用以发布传菜车传菜指令的厨房控制主机,所述厨房控制主机连接地面触控屏,所述厨房控制主机与所述地面触控屏设于厨房传菜档口处,并通过无线通讯模块与各传菜车无线连接。
所述架空轨道包括主轨道以及从主轨道延伸出的多条分支轨道,延伸出的分支轨道设于餐桌区域上方,各分支轨道在主轨道的转弯点处设有ID标识,各餐桌上方对应的分支轨道处设有ID标识,每一台传菜车设有用以检测ID标识的车载RFID传感器。
每台传菜车包括传菜箱、传菜车主控板、与传菜车主控板分别连接的行走机构、舵机、锂电池组、集电器、刹车器、无线通讯模块、升降机构和安全防撞传感器,所述传菜车主控板通过无线通讯模块连接厨房控制主机,所述升降机构的底部连接传菜箱。
每一台传菜车设有各自独立的ID标识卡,每一台传菜车的车载RFID传感器若检测到所移动的轨道上运行有其他传菜车的ID标识卡,则停止行驶。
进一步地,各轨道之间构成的道口处以及各餐桌上方对应的分支轨道的目标位置设有定位片,所述传菜车上还设有用以感应定位片的车载道口传感器和车载站点传感器,二者分别与传菜车主控板连接,当车载道口传感器或车载站点传感器感应到相应的定位片时,传菜车主控板控制传菜车在轨道上停止。
进一步地,所述架空轨道包括两条相对平行且固定设置的L型导轨,两条L型导轨之间形成供传菜车行走的传菜轨道,所述传菜轨道包括主轨道以及从主轨道延伸出的多条分支轨道。
进一步地,每台传菜车上设有用以放置传菜箱的内腔,当收到传菜指令时,传菜车主控板控制升降机构上升,将传菜箱上升至传菜车内腔中。
进一步地,所述传菜箱内设有用以检测菜品是否取出的菜品传感器。
进一步地,每台传菜车还设有语音提醒模块,所述语音提醒模块与传菜车主控板连接。
进一步地,每台传菜车采用混合供电模式,通过触滑头接触各轨道触滑线给传菜车上的各个设备供电,其内置锂电池组,在静态或锂电池电压不足时会自动充电,当传菜车在运行过程中触滑头与轨道触滑线接触不良时,自动转换为锂电池供电模式。
本发明提供的架空轨道式智能无人传菜控制系统,相较于现有技术至少包括如下有益效果:
1)提高传菜效率:本发明设置一条主轨道和多条支轨道,主轨道作为主要运行通道,支轨道为传菜卸货点的布局模式,餐桌传菜点设在支轨,传菜车从主轨驶入支轨传菜,而在主轨上通行的其他传菜车不受影响,大幅提高传菜车通行效率;
2)性能可靠,系统造价低:采用独特的架空闭环轨道运行环境,比起以AGV为载体的传菜车,本系统传菜车的制造成本大幅下降,其环境适应性强,社会效益和经济效益显著;
3)独特的运行交通调度方式:通过将主轨设置为主要运行通道,将支轨设置为传菜卸货点的布局模式,采用RFID技术,独特的调度算法,可设置多个厨房传菜档口,配置更多的传菜车参与运行;
4)避免相撞问题:本发明利用RFID技术作为多车辆安全防撞方案,在每辆传菜车上设置了ID标识卡,作为车载身份识别卡,在分支轨道和主轨道的交岔点,分支轨道上的传菜车从分支轨道驶出时,可通过RFID传感器检测主轨道上其他向道口靠近的车辆,当检测到有车靠近时,分支轨道的传菜车会停止行驶,避免了岔道口不同方向过来两车相撞问题;
5)双路供电系统:采用滑触线轨道供电系统和锂电池组供电模块,可以保障传菜车长时间在线运行。
附图说明
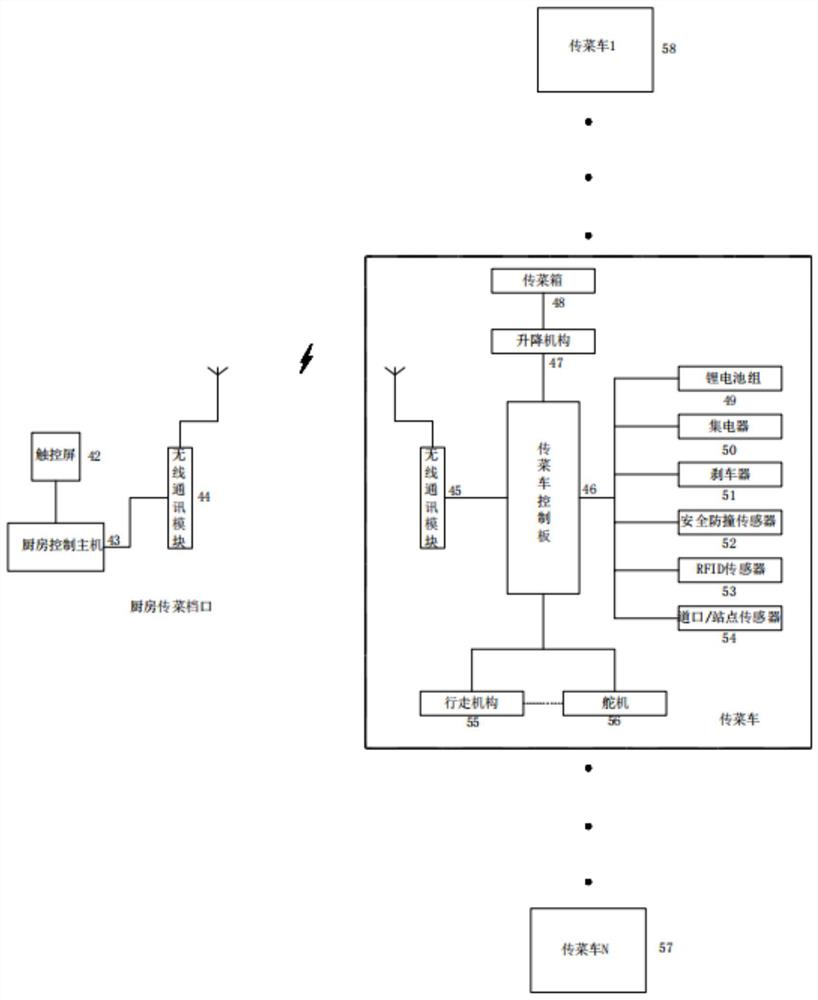
图1为实施例中架空轨道式智能无人传菜控制系统的结构框图;
图2为实施例中架空轨道式智能无人传菜控制系统的工作原理流程图。
具体实施方式
下面结合附图和具体实施例对本发明进行详细说明。显然,所描述的实施例是本发明的一部分实施例,而不是全部实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应属于本发明保护的范围。
实施例
本发明涉及一种架空轨道式智能无人传菜控制系统,用于餐厅和厨房,该系统包括架空轨道、厨房控制主机、地面触控屏、无线通讯模块和多台可在架空轨道上运行的传菜车。
厨房控制主机和地面触控屏设置在厨房传菜档口处,厨房控制主机连接地面触控屏,并通过无线通讯模块与各传菜车无线连接,用于对传菜车发布指令。地面触控屏设有目标设定键和启动键,目标设定键用于选择传菜车的目标餐桌,各餐桌设有对应的ID标识,启动键用于选择后执行传菜车运行指令。
传菜车包括机体、传菜箱、传菜车主控板、行走机构、舵机、锂电池组、集电器、刹车器、无线通讯模块、升降机构和安全防撞传感器,传菜车主控板与锂电池组、集电器、刹车器、升降机构、行走机构、舵机和安全防撞传感器分别连接。机体内设置传菜车主控板、舵机、锂电池组、集电器、刹车器和无线通讯模块。传菜车主控板通过无线通讯模块与厨房控制主机连接。升降机构安装在传菜车机体上,升降机构的底端固定有放置菜品盘子的传菜箱。机体设有用于放置传菜箱的内腔,当收到传菜指令时,传菜车主控板控制升降机构上升,将传菜箱上升至传菜车内腔中,以完成装载,进而进行下一步行走传菜。传菜车到达目标位置后,传菜车主控板控制升降机构下降,将传菜箱下降至餐桌上方,以供客人取出餐品。行走机构设置在机体的底部,行走机构与舵机连接;行走机构优选为轮式行走机构,该轮式行走机构与架空轨道相匹配。
本发明的安全防撞传感器可采用红外线漫反射传感器、激光反射型传感器、超声波传感器、视觉传感器等,其作用是当接近前方传菜车指定间距时,安全防撞传感器发出信号反馈至传菜车主控板,主控板发出指令启动刹车和停止行走机构运行,使后方传菜车与前方传菜车保持一定的安全距离。指定间距可根据实际情况预先设定,优选300-500mm间距。
在本实施例中,作为优选方案,传菜车设有电动门,传菜车主控板与电动门连接,当菜品置入传菜箱后,且传菜车主控板接收到传菜指令后,控制电动门关闭。
在本实施例中,作为优选方案,传菜车设有语音提醒模块,语音提醒模块设于传菜车机体上,并与传菜车主控板连接。
在本实施例中,作为优选方案,传菜车采用混合供电模式,通过触滑头接触各轨道触滑线给传菜车上的各个设备供电,其内置锂电池组,在静态或锂电池电压不足时会自动充电,当传菜车在运行过程中触滑头与轨道触滑线接触不良时,自动转换为锂电池供电模式。
在本实施例中,作为优选方案,传菜箱内设有菜品传感器,用于检测菜品是否已经取出。菜品传感器可选用薄膜型压力传感器、视觉传感器、红外线感应传感器、微动开关阵列等方式实现菜品的检测。例如,选用薄膜型压力传感器,将其设在传菜箱底部,当菜品放置在传菜箱底板任何地方,薄膜型压力传感器感应压力值增大,即输出反馈信号给主控板,主控板即判定是有菜品放置入传菜箱内,可以执行传菜任务,反之,当传菜车到达目标餐桌,客人将菜品从传菜箱内取出,薄膜型压力传感器的感应压力值变小为原始值时,将反馈信号给主控板,主控板即判定菜品已经取出,指令传菜车执行返回程序。
架空轨道架设在餐厅和厨房的楼层板下方。传菜车设置在架空轨道上并可沿其移动。架空轨道包括两条相对平行且固定设置的L型导轨,两个L型导轨之间形成供传菜车行走的传菜通道,该传菜通道分为主轨道和分支轨道两部分,其中,主轨道为主要运行通道,分支轨道与主轨道一侧连接交汇,并延伸至餐桌区域上方,即分支轨道作为传菜卸货点。分支轨道在主轨道的转弯点处设有ID标识,且各餐桌区域上方对应的分支轨道位置,即传菜卸货点处同样设有ID标识。传菜车上设有车载RFID传感器,用于检测分布在轨道各转弯点和目标站点的ID标识。车载RFID传感器与传菜车主控板连接。此外,每一台传菜车设有各自独立的ID标识卡,每一台传菜车的车载RFID传感器还可通过检测通道上运行的其他车的ID标识卡(以控制传菜车)停止行驶,以避免岔道口二车相撞的问题。
本发明在传菜车的不同位置上还设有车载道口传感器和车载站点传感器,二者分别与传菜车主控板连接,用于结合定位片使传菜车在道口和目标点进行精确定位,车载道口传感器和站台传感器都采用霍尔感应式传感器,其感应方式是通过磁感应或金属感应。定位片是一种金属片或者是S/N极磁性金属片,其设在轨道内需要传菜车精确定位的地方(比如各轨道形成的道口处或餐桌正上方对应的轨道上),当传菜车的车载道口传感器感应到道口处设置的定位片,则车子立即在轨道停止。当传菜车的车载站点传感器感应到相应餐桌正上方的定位片,则车子立即在餐桌正上方轨道停止。
本发明系统的工作原理为:
在厨房传菜档口,厨房工作人员首先将菜品置入传菜车的传菜箱内,然后通过地面触控屏设定目标餐桌号码(即传菜卸货点处的ID标识),按下启动键,传菜指令通过无线通讯模块发送至传菜车,传菜车接收到传菜指令,关闭传菜箱电动门,启动升降机构将传菜箱上升至传菜车内腔,启动传菜车行走轮,向目标餐桌行驶。
在传送过程中,车载RFID传感器会检测分布在轨道各转弯点和目标站点的ID标识,当传菜车行驶至L、T或十字形道口附近(即分支轨道在主轨道的转弯点处),车载RFID传感器会读取到道口的ID标识信息,传菜车主控板控制传菜车减速,当传菜车驶入道口,车载道口传感器检测到定位片反馈给主控板,传菜车主控板即指令传菜车停止,传菜车主控板会根据读到的ID标识信息,指令舵机执行转弯动作,然后指令传菜车继续行驶,当传菜车行驶至目标餐桌附近道口时,车载RFID传感器检测到道口的ID标识,传菜车主控板指令传菜车减速,当传菜车行至分支道口,车载道口传感器检测到定位片即指令传菜车停止,控制板指令舵机执行转弯动作,然后指令传菜车驶入分支轨道,分支轨道设置在餐桌上方,当车载站点传感器检测到定位片,则传菜车主控板指令传菜车停止,并指令启动升降机构,将传菜箱下降至餐桌上方,开启传菜箱电动门并语音提醒客人取走菜品。
当菜品传感器检测到菜品已经取出后,信号反馈至传菜车主控板,传菜车主控板指令传菜箱电动门关闭,升降机构上升,将传菜箱升至传菜车内腔,传菜车主控板指令传菜车启动行走轮,将传菜车从分支轨道行驶至主轨道口,传菜车主控板指令舵机执行转弯动作,然后指令传菜车驶入主轨道,传菜车从主轨道返回至厨房排队区等候下次传菜任务。
本发明设置主轨道为主要运行通道,设置分支轨道为传菜卸货点,这种运行轨道布局模式使得传菜车传送菜品作业点在分支轨道上,而其他传菜车在主轨道的运行不受限制,大幅提高传菜车通行效率。除设置常规安全防撞红外传感器外,本发明在每辆传菜车上设置了ID标识卡,作为车载身份识别卡,在分支轨道和主轨道交岔点,分支轨道上的传菜车从分支轨道驶出时,可以通过RFID传感器检测主轨道上其他向道口靠近的车辆,检测到有车靠近时,分支轨道的传菜车会停止行驶,避免岔道口二车相撞。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的工作人员在本发明揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
- 一种架空轨道式智能无人传菜控制系统
- 一种架空轨道式智能无人传菜系统