防车体侧翻支撑装置
文献发布时间:2023-06-19 09:44:49
技术领域
本发明涉及爬行机器人技术领域,尤其是一种避免爬行机器人在圆形管道行驶时,发生侧翻,提高圆形管道检测效率的防车体侧翻支撑装置。
背景技术
在检测圆形管道时,由于圆形管道直径较小,人为检测较为困难,有的圆形管道较深,圆形管道内部的有害、有毒气体较多,检测人员下去危险度较高。同时圆形管道距离较长,在下面检测时检测人员速度较慢、危险性较高,可能还会突然遇到圆形管道突然涨水,威胁着检测人员的生命安全。
目前,通常使用爬行机器人对管道内部进行检测,该机器人在其车体两侧会前后对称设置四个车轮,车轮沿圆形管道的侧壁行走,由于管壁上湿滑,在行走过程中,非常容易发生倾斜情况,导致车体发生侧翻,爬行机器人就不能向前继续移动检测,还需要专业人员将机器人拉出重新检测,给圆形管道的检测带来极大的不便,而且大大降低检测效率。
发明内容
本发明所要解决的就是现有爬行机器人在圆形管道内部进行检测,容易倾斜、侧翻,造成检测效率低、检测不便的问题,提供一种避免爬行机器人在圆形管道行驶时,发生侧翻,提高圆形管道检测效率的防车体侧翻支撑装置。
本发明的防车体侧翻支撑装置,安装在爬行机器人的车体侧部,其特征在于该支撑装置包括连接组件和支撑组件,连接组件为两组,安装在车体两侧中间位置,支撑组件为两套,分别安装在车体两侧的连接组件下端,其中:
连接组件包括连接杆、连接板、连接栓、调节底座和调节杆,连接杆两端固定安装在车体上,连接板上沿和下沿均设置有连接孔,上沿的连接孔套接在连接杆上,连接栓安装在连接板下沿的连接孔内,连接板通过连接栓与支撑组件连接,连接板背面设置有连接底座;调节底座固定在连接杆下方的车体侧壁上,调节底座上竖直设置滑槽,调节杆上端与下端的两侧均设置有螺栓,上端通过螺帽与连接板背面的连接底座连接,调节杆绕该连接处转动;调节杆下端螺栓安装在滑槽内,通过螺帽与滑槽连接,沿滑槽滑动,调节杆绕该连接处转动;
支撑组件包括支撑杆、套筒、伸缩轴、支撑轮、转轴、球铰座和球铰头,两根支撑杆水平设置在车体两侧,与车体侧壁平行,支撑杆内侧设置连接孔,通过连接孔与连接组件的连接栓连接,支撑杆外侧固定有两个水平的套筒,套筒一端固定在支撑杆侧壁,另一端开口,开口端水平固定有弹簧;收缩轴套在弹簧内,一端插入套筒中,另一端固定球铰座,收缩轴侧壁与弹簧另一端固定连接;转轴一端固定球铰头,另一端连接支撑轮,球铰头插在球铰座中。
所述的收缩轴插入套筒内部的顶部,与套筒内侧壁留有间隙,该间隙形成缓冲空间,便于收缩轴在受外力时,可以部分收入套筒中,同时通过弹簧的弹性力,恢复原状。
所述的套筒开口的端口处设置有圆环,收缩轴插入套筒端设置有圆片,圆环内径小于圆片直径,通过圆环限制圆片的行程,避免收缩轴从套筒中脱离。
爬行机器人对管道内部进行检测过程中,通过车体所带的车轮在圆形管道内行走检测,在行走过程中,通过支撑轮支撑辅助行走,当车体向一侧倾斜时,该侧支撑轮受压带动伸缩轴向套筒内收缩,此时该伸缩轴上的弹簧被拉伸,在弹簧作用力下,拉动伸缩轴复位,起到支撑作用;弹簧作用下,伸缩轴向外移动时,通过圆环对圆片的行程进行限制,避免伸缩轴脱出套筒;采用调节杆、调节底座与连接板相互连接且绕连接点转动的结构,能够自动实时调整调节杆的高度,保持支撑轮能够附着在管壁上;并且,支撑轮采用球铰结构连接,可实现多角度转动,保持支撑轮与管壁接触,最大限度的提供支撑。
本发明的防车体侧翻支撑装置,结构简单,设计科学,使用方便,该防车体侧翻的支撑轮设在爬行机器人的两侧,为车体提供支撑,使车体在行走的时候不易发生侧翻。同时设有可调节支撑轮倾斜角的连接结构,检测人员可以根据圆形管道的直径来调节支撑轮的摆角,使支撑轮可以支撑在圆形管道内壁;而且还设置具备有伸缩功能的支撑结构,在遇到圆形管道发生变化时可以调节支撑轮的间距,更好的实现对管道变化的适应能力,同时支撑轮还可以通过球铰结构实现小幅度偏转,从而提高支撑轮的自适力,有效的防止爬行机器人在行驶时因四周都是圆形管道而容易出现翻车情况,使车体可以保持同一方向前进,这样可以提高圆形管道的检测效率;并且适应多尺寸管道,实现了无人化检测,避免了检测中出现更多的危险因素。
附图说明
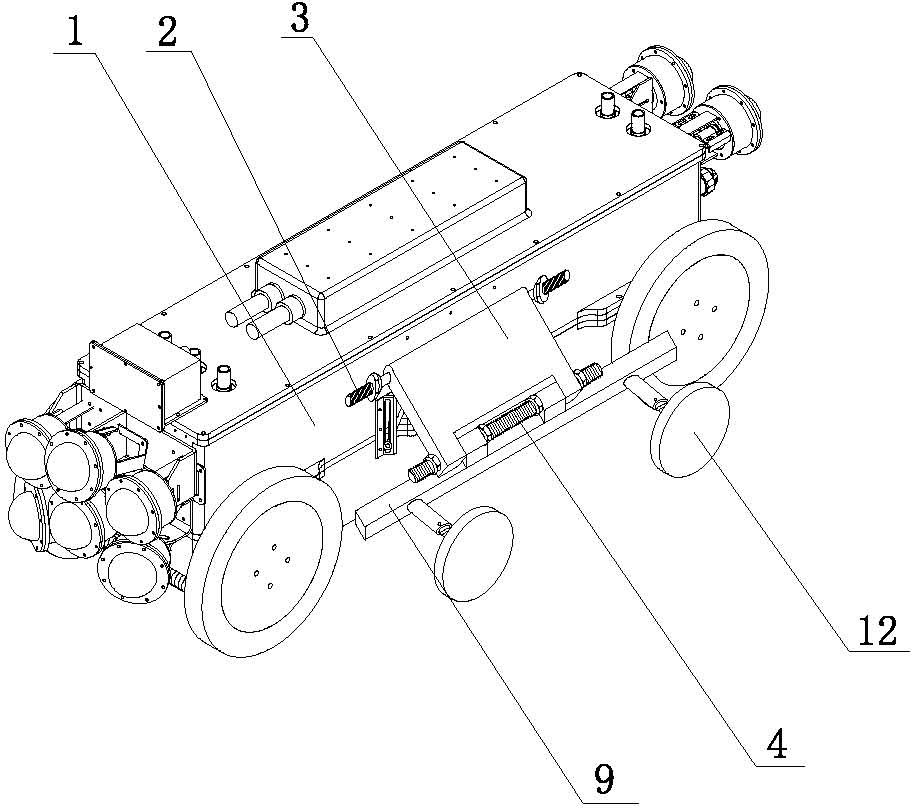
图1为本发明结构示意图。
图2为俯视结构示意图。
图3为连接组件结构示意图。
图4为支撑组件结构示意图。
其中,车体1,连接杆2,连接板3,连接栓4,调节底座5,调节杆6,连接底座7,滑槽8,支撑杆9,套筒10,伸缩轴11,支撑轮12,转轴13,球铰座14,球铰头15,圆环16,圆片17。
具体实施方式
实施例1:一种防车体侧翻支撑装置,安装在爬行机器人的车体1侧部,该支撑装置包括连接组件和支撑组件,连接组件为两组,安装在车体1两侧中间位置,支撑组件为两套,分别安装在车体1两侧的连接组件下端,其中:
连接组件包括连接杆2、连接板3、连接栓4、调节底座5和调节杆6,连接杆2两端固定安装在车体1上,连接板3上沿和下沿均设置有连接孔,上沿的连接孔套接在连接杆2上,连接栓4安装在连接板3下沿的连接孔内,连接板3通过连接栓4与支撑组件连接,连接板3背面设置有连接底座7;调节底座5固定在连接杆2下方的车体1侧壁上,调节底座5上竖直设置滑槽8,调节杆6上端与下端的两侧均设置有螺栓,上端通过螺帽与连接板3背面的连接底座7连接,调节杆6绕该连接处转动;调节杆6下端螺栓安装在滑槽8内,通过螺帽与滑槽8连接,沿滑槽8滑动,调节杆6绕该连接处转动;
支撑组件包括支撑杆9、套筒10、伸缩轴11、支撑轮12、转轴13、球铰座14和球铰头15,两根支撑杆9水平设置在车体1两侧,与车体1侧壁平行,支撑杆9内侧设置连接孔,通过连接孔与连接组件的连接栓4连接,支撑杆9外侧固定有两个水平的套筒10,套筒10一端固定在支撑杆9侧壁,另一端开口,开口端水平固定有弹簧;收缩轴套在弹簧内,一端插入套筒10中,另一端固定球铰座14,收缩轴侧壁与弹簧另一端固定连接;转轴13一端固定球铰头15,另一端连接支撑轮12,球铰头15插在球铰座14中。
收缩轴插入套筒10内部的顶部,与套筒10内侧壁留有间隙,该间隙形成缓冲空间,便于收缩轴在受外力时,可以部分收入套筒10中,同时通过弹簧的弹性力,恢复原状。套筒10开口的端口处设置有圆环16,收缩轴插入套筒10端设置有圆片17,圆环16内径小于圆片17直径,通过圆环16限制圆片17的行程,避免收缩轴从套筒10中脱离。
使用时,根据圆形管道的直径,通过连接组件的调节杆6调整连接板3的倾斜角度,使支撑轮12可以附着在管道内壁上,爬行机器人对管道内部进行检测过程中,通过车体1所带的车轮在圆形管道内行走检测,在行走过程中,通过支撑轮12支撑辅助行走,当车体1向一侧倾斜时,该侧支撑轮12受压带动伸缩轴11向套筒10内收缩,此时该伸缩轴11上的弹簧被拉伸,在弹簧作用力下,拉动伸缩轴11复位,起到支撑作用;弹簧作用下,伸缩轴11向外移动时,通过圆环16对圆片17的行程进行限制,避免伸缩轴11脱出套筒10;采用调节杆6、调节底座5与连接板3相互连接且绕连接点转动的结构,能够自动实时调整调节杆6的高度,保持支撑轮12能够附着在管壁上;并且,支撑轮12采用球铰结构连接,可实现多角度转动,保持支撑轮12与管壁接触,最大限度的提供支撑;当遇到圆形管道发生变化时可以调节支撑轮12的宽度,更好的实现对管道变化的适应能力,同时通过球铰结构实现小幅度偏转,从而提高支撑轮12的自适力。
- 防车体侧翻支撑装置
- 一种防侧翻车体、三轮婴儿车及三轮滑板车