一种远距离的无人化检测伤员的方法与系统
文献发布时间:2023-06-19 09:44:49
技术领域
本发明实施例涉及搜索救援技术领域,尤其涉及一种远距离的无人化检测伤员的方法与系统。
背景技术
自然灾害以及战争等事件因其突发性或复杂性,容易造成较多的人员伤亡。目前,伤员搜救工作需要耗费大量的人力和物力,伤员搜救时间较长,降低了伤员的救治效率。
发明内容
有鉴于此,本发明实施例期望提供一种远距离的无人化检测伤员的方法与系统;能够降低伤员搜救的难度和时长,从而提高了伤员的救治效率。
本发明实施例的技术方案是这样实现的:
第一方面,本发明实施例提供了一种远距离的无人化检测伤员的系统,所述系统包括:伤员搜救无人机、搭载于所述无人机上的伤员体征采集部分和通信中继部分、接收处理部分;其中,当所述无人机发现处于地面的目标伤员后,将所述伤员体征采集部分投放于所述目标伤员所在地面区域;
所述伤员体征采集部分,经配置为采集所述地面区域内的所述目标伤员的生命状态数据,并将所述生命状态数据通过第一无线传输链路传输至所述通信中继部分;其中,所述生命状态数据包括所述目标伤员的生命体征数据以及所述目标伤员所处的位置信息;
所述通信中继部分,经配置为将所述生命状态数据通过第二无线传输链路传输至所述接收处理部分;
所述接收处理部分,经配置为基于接收到的所述生命状态数据绘制对应的波形图以判断所述目标伤员的伤情。
第二方面,本发明实施例提供了一种远距离的无人化检测伤员的方法,所述方法应用于第一方面所述的远距离的无人化检测伤员的系统,所述方法包括:
当无人机发现处于地面的目标伤员后,将搭载于所述无人机上的伤员体征采集部分投放于所述目标伤员所在地面区域;
通过所述伤员体征采集部分采集所述地面区域内的所述目标伤员的生命状态数据,并将所述生命状态数据通过第一无线传输链路传输至搭载于所述无人机上的通信中继部分;
通过所述通信中继部分将所述生命状态数据通过第二无线传输链路传输至所述接收处理部分;
通过所述接收处理部分基于接收到的所述生命状态数据绘制对应的波形图以判断所述目标伤员的伤情。
本发明实施例提供了一种远距离的无人化检测伤员的方法与系统;当无人机搜寻到地面区域内的伤员之后,投放伤员体征采集部分已采集的目标伤员的生命状态数据;通过通信中继部分将目标伤员的生命状态数据传输至后方的接收处理部分;接收处理部分基于接收到的所述生命状态数据绘制对应的波形图以判断所述目标伤员的伤情。从而能够及时迅速地将目标伤员的生命状态数据传输至后方进行评估,极大地提高伤员搜救工作的效率,增加伤员的救治几率。
附图说明
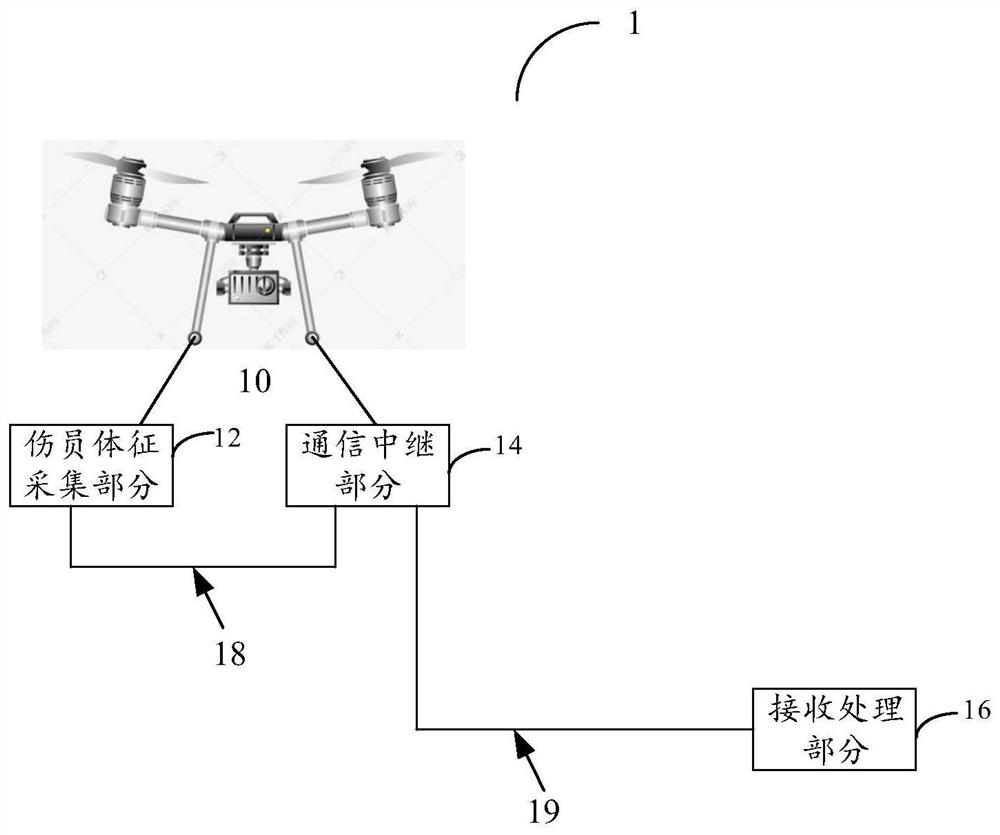
图1为本发明实施例提供的一种远距离的无人化检测伤员的系统组成示意图;
图2为本发明实施例提供的发现目标伤员的场景示意图;
图3为本发明实施例提供的伤员体征采集部分的组成示意图;
图4为本发明实施例提供的通信中继部分的组成示意图;
图5为本发明实施例提供的配置LoRa模块的流程示意图;
图6为本发明实施例提供的呼吸信号的波形示意图;
图7为本发明实施例提供的一种远距离的无人化检测伤员的方法流程示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
参见图1,其示出了本发明实施例提供的一种远距离的无人化检测伤员的系统1,所述系统1可以包括:伤员搜救无人机10、搭载于所述无人机10上的伤员体征采集部分12和通信中继部分14、接收处理部分16;其中,当所述无人机10发现处于地面的目标伤员后,将所述伤员体征采集部分12投放于所述目标伤员所在地面区域;
所述伤员体征采集部分12,经配置为采集所述地面区域内的所述目标伤员的生命状态数据,并将所述生命状态数据通过第一无线传输链路18传输至所述通信中继部分14;其中,所述生命状态数据包括所述目标伤员的生命体征数据以及所述目标伤员所处的位置信息;
所述通信中继部分14,经配置为将所述生命状态数据通过第二无线传输链路19传输至所述接收处理部分16;
所述接收处理部分16,经配置为基于接收到的所述生命状态数据绘制对应的波形图以判断所述目标伤员的伤情。
在图1所示的系统1中,所述伤员搜救无人机10可以融合红外热像仪、可见光相机和激光测距,从而能够在特定区域内针对处于地面伪装的伤员(比如伤员掩藏于草丛或丛林中)和遇险飞行员进行快速、准确搜寻。当无人机10搜寻到地面区域内的伤员之后,需要针对该目标伤员进行及时且高效的伤情评估,所以,及时迅速地将目标伤员的生命状态数据传输至后方进行评估对于后续目标伤员的救援以及送转运极为重要,可以极大地提高伤员搜救工作的效率,增加伤员的救治几率。
在一些可能的实现方式中,第一无线传输链路18优选为远距离无线通信(LoRa,Long Range)无线通信链路;而所述第二无线传输链路19为无线电通信链路。
在一些示例中,当无人机10搜寻到地面区域内的目标伤员之后,如图2所示,则可以将搭载的伤员体征采集部分12投放至目标伤员所在地面区域,从而利用伤员体征采集部分12对目标伤员的生命体征状态数据进行采集;参见图3,所述伤员体征采集部分12包括:生物雷达传感器121、定位模块122、第一主控模块123以及第一发送模块124;
其中,所述生物雷达传感器121,经配置为在其所覆盖的感知范围内采集所述目标伤员的生命体征信号,并将采集到的生命体征信号传输至所述第一主控模块123;
所述定位模块122,经配置为对所述伤员体征采集部分12所处位置进行定位,获得定位信号;并且定时将定位信号传输至所述第一主控模块123;
所述第一主控模块123,经配置为将所述生命体征信号转换为数字信号,获得所述目标伤员的生命体征数据;以及,将所述定位信号转化为所述伤员体征采集部分12所处的位置信息;
所述第一发送模块124,经配置为利用符合所述第一无线传输链路18的通信协议将所述目标伤员的生命体征数据以及所述位置信息作为所述目标伤员的生命状态数据发送至所述第一无线传输链路18。
对于图3所示的伤员体征采集部分12,具体来说,生物雷达传感器121的型号为JC122-3.3UA6,经配置为发射不对称的宽波束信号;以及,当正常人呼吸时,采集所述目标伤员呼吸时胸腔针对发射信号进行反射所产生回波信号;以及,将采集到的回波信号经过放大与滤波处理获得理想的所述目标伤员的生命体征信号。进一步来说,所述生物雷达传感器121具有极其灵敏的感知能力,其所覆盖的感知范围参数包括:水平角度范围为-40°至+40°;垂直角度范围为-16°至+16°;等效于胸腔扩张幅度的轴向距离小于6米m。而且生物雷达传感器121具有外形小巧、低功耗,适于电池供电环境的特点,极好的符合了无人机10搜寻伤员时,对硬件装置的体积小、低功耗的要求。所述定位模块122可以优选为全球定位系统(GPS,Global Positioning System)与北斗双模定位模块,能够实现GPS和/或北斗定位系统进行定位。所述第一主控模块123可以利用主控芯片STM32F103C8T6以实现,该芯片是一款基于ARM Cortex-M内核STM32系列的32位的微控制器,程序存储器容量是64KB,该芯片集成有定时器Timer,控制器局域网络(CAN,Controller Area Network),模拟数字转换器(ADC,Analog-to-digital converter),串行外设接口(SPI、Serial PeripheralInterface),二线制同步串行总线(I2C,Inter-Integrated Circuit),通用串行总线(USB,Universal Serial Bus),通用异步收发传输器(UART,Universal AsynchronousReceiver/Transmitter)等内部资源和外设接口;通过使用开发工具KEIL实现C语言编程并下载至第一主控模块123,以完成将生物雷达传感器121采集到的模拟呼吸信号转换为数字信号以及针对第一发送模块124进行LoRa通信的配置。
在一些示例中,当无人机10将伤员体征采集部分12进行投放且伤员体征采集部分12采集到目标伤员的生命体征状态数据之后,就需要向当前环境后方的接收处理部分16进行传输。由于两者之间相距较远,需要进行通信中继,基于此,可以利用无人机10对通信中继部分14进行搭载,从而提供伤员体征采集部分12与接收处理部分16之间的传输中继。对于所述通信中继部分14来说,参见图4,包括第一接收模块141、第二主控模块142以及第二发送模块143;其中,
所述第一接收模块141,经配置为利用符合所述第一无线传输链路18的通信协议从所述第一无线传输链路18接收所述目标伤员的生命状态数据;
所述第二主控模块142,经配置为将所述目标伤员的生命状态数据传输至所述第二发送模块143;
所述第二发送模块143,经配置为将所述目标伤员的生命状态数据发送至所述第二无线传输链路19。
针对图4中所示,第一接收模块141可以相应于所述第一发送模块124采用LoRa进行通信。所述第二主控模块142由于需要对第一接收模块141也进行相应的进行LoRa通信的配置以及将目标伤员的生命状态数据通过第二发送模块143利用无线电通信链路向远端后方的接收处理部分16进行传输,结合之前阐述,所述第二主控模块142也可以利用主控芯片STM32F103C8T6以实现。
需要说明的是,LoRa的工作模式为点对点的透明传输,即数据完全透明,发送端与接收端的信息完全相同,所以,需要将作为LoRa接收端的第一接收模块141与作为发送端的第一发送模块124通过AT指令配置为相同的通信地址、信道与速率。所以,关于第一主控模块123针对第一发送模块124以及第二主控模块142针对第一接收模块141进行LoRa通信协议的配置流程可以如图5所示。由于第一发送模块124与第一接收模块141均采用LoRa通信,因此,第一发送模块124与第一接收模块141在图5中可以被统称为LoRa模块,参见图5,该流程可以包括:S51:主控芯片对LoRa模块进行检测。S52:判断是否检测成功:若检测失败,则返回S51继续进行检测;若检测成功,则转为S53:为LoRa模块设置地址;随后执行S54:判断LoRa模块检测地址设置是否成功;若检测失败,则返回S51继续进行检测;若检测成功,则转为S55:为LoRa模块设置信道及速率;接着执行S56:判断LoRa模块检测信道及速率设置是否成功;若检测失败,则返回S51继续进行检测;若检测成功,则转为S57:设置LoRa模块的工作模式和波特率及数据校验位。当以上设置均完成,则为S58:LoRa模块设置成功。
在一些示例中,所述接收处理部分16,包括第二接收模块以及数据处理终端;其中,
所述第二接收模块,经配置为利用符合所述第二无线传输链路19的通信协议从所述第二无线传输链路19接收所述目标伤员的生命状态数据,并通过串口通信将所述目标伤员的生命状态数据传输至所述数据处理终端;
所述数据处理终端,经配置为基于所述目标伤员的生命状态数据绘制对应的波形图,以使得及时根据所述波形图判断所述目标伤员的伤情。
对于上述示例,所述第二接收模块,包括所述无人机10的T12遥控器;
所述数据处理终端,经配置为读取通过串口通信传输的所述目标伤员的生命状态数据;以及,利用设定的可视化方案将所述目标伤员的生命状态数据进行可视化处理,获得所述波形图。
具体来说,数据处理终端可以是能够实现数据传输以及信息处理的终端设备,可以具体为无线装置、移动或蜂窝电话(包含所谓的智能电话)、个人数字助理(PDA)、视频游戏控制台(包含视频显示器、移动视频游戏装置、移动视频会议单元)、膝上型计算机、桌上型计算机、电视机顶盒、平板计算装置、电子书阅读器、固定或移动媒体播放器,等。
第二接收模块以及数据处理终端优选为USB转串口模块进行程序的下载及串口信息的读取,因此,T12遥控器向数据处理终端传输的目标伤员的生命状态数据为串口数据。在具体实施过程中,最常用的USB转串口模块型号包括FT232、PL2303、CH340三种,以上三个芯片中PL2303某些型号不支持win10而且稳定性不如CH340和FT232。因此,在本发明实施例中,优选采用CH340型号的USB转串口模块。
此外,当前常规的串口数据可视化方案有很多,例如:SerialChart串口工具、调用Python的yecharts与matplotlib等工具库以及使用LabVIEW制作串口示波器。而本发明实施例优选使用SerialChart串口波形显示软件,其可以通过文本针对用户可自定义波形颜色、波形通道、波形显示窗口背景颜色等进行配置。此外,还可以配置端口号、波特率以及接收数据的大小范围等参数。通过SerialChart将T12遥控器传输的串口数据实时的绘制成波形图,以实现实时反馈,从而可以有效地提升伤员伤情的检测的效率。
关于前述技术方案所阐述的系统1的可适用性,本发明实施例通过以下场景进行测试:
首先,针对生物雷达传感器121的目标有效距离进行测试。在本发明实施例中,目标伤员的生命体征信号为目标伤员的呼吸信号,而对伤员伤情进行检测的方法为观察接收处理部分16所展示的实时波形图,经多次试验可以得出:如图6所示,较为规律部分的波形图为检测到的呼吸信号的波形,较为平缓且杂乱的波形为未检测到人体呼吸信号。将生物雷达传感器121放置人体胸腔前1m的位置进行检测,逐次增加0.5m。基于图6所示的波形图,可以测试获得生物雷达传感器121感应人体呼吸信号的有效距离可达2.5m以上。
接着,针对系统1的最大通信距离进行测试。通常来说,LoRa通信距离为L1,利用无线电通信的第二发送模块143与T12遥控器之间的空中通信距离为L2,那么系统1的通信距离L=L1+L2。在较为空旷的环境下做如下测试步骤:
首先,将第二发送模块143与T12遥控器的位置固定,即保持L2不变,改变LoRa发送端与接收端之间的距离。逐次增加设定的长度,从而可以测试得到LoRa通信距离L1最大可达2km。
接着,将LORA发送端与接收端位置固定,即保持L1不变,改变第二发送模块143与T12遥控器之间的距离。逐次增加设定的长度,从而可以测试获得无线电的空中通信距离L2最大可达1km。
经过多组测试结果分析,得出结论:系统1最大通信距离L最大可达3km以上。也就是说,本发明实施例所提出的系统1,能够针对3km范围的伤员伤情进行检测。
基于前述技术方案相同的发明构思,参见图7,其示出了本发明实施例提供的一种远距离的无人化检测伤员的方法,所述方法应用于前述技术方案中所述的远距离的无人化检测伤员的系统,所述方法包括:
S701:当无人机发现处于地面的目标伤员后,将搭载于所述无人机上的伤员体征采集部分投放于所述目标伤员所在地面区域;
S702:通过所述伤员体征采集部分采集所述地面区域内的所述目标伤员的生命状态数据,并将所述生命状态数据通过第一无线传输链路传输至搭载于所述无人机上的通信中继部分;
S703:通过所述通信中继部分将所述生命状态数据通过第二无线传输链路传输至所述接收处理部分;
S704:通过所述接收处理部分基于接收到的所述生命状态数据绘制对应的波形图以判断所述目标伤员的伤情。
对于上述方案,在一些示例中,S702所述的通过所述伤员体征采集部分采集所述地面区域内的所述目标伤员的生命状态数据,并将所述生命状态数据通过第一无线传输链路传输至搭载于所述无人机上的通信中继部分,包括:
利用所述伤员体征采集部分中的生物雷达传感器在其所覆盖的感知范围内采集所述目标伤员的生命体征信号,并将采集到的生命体征信号传输至所述伤员体征采集部分中的第一主控模块;
利用所述伤员体征采集部分中的定位模块为对所述伤员体征采集部分所处位置进行定位,获得定位信号;并且定时将定位信号传输至所述第一主控模块;
利用所述第一主控模块将所述生命体征信号转换为数字信号,获得所述目标伤员的生命状态数据;以及,将所述定位信号转化为所述伤员体征采集部分所处的位置信息;
通过所述伤员体征采集部分中第一发送模块利用符合所述第一无线传输链路的通信协议将所述目标伤员的生命状态数据以及所述伤员体征采集部分所处的位置信息发送至所述第一无线传输链路。
可以理解地,图7所示的技术方案及示例,其具体实施过程可以参考前述技术方案中关于远距离的无人化检测伤员的系统1及其组成部分的阐述,本发明实施例对此不做赘述。
需要说明的是:本发明实施例所记载的技术方案之间,在不冲突的情况下,可以任意组合。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
- 一种远距离的无人化检测伤员的方法与系统
- 一种判断远距离传输检测系统及检测方法