医用加速器手控器
文献发布时间:2023-06-19 09:44:49
技术领域
本发明涉及一种放疗设备控制器;具体涉及一种医用加速器手控器。
背景技术
现有的医用加速器手控器结构包括壳体和按钮,在壳体内设置由单片机、模数转换器和电位器组成的控制电路,单片机的通讯端连接医疗设备的控制端,单片机的数据输入端分别连接模数转换器的输出端和设置在壳体上的按钮,模数转换器的输入端连接电位器,电位器的滑动端设置调速旋钮,属于加速器中的灯光和运动的控制部件。现有技术结构框图如图1所示。采用单片机处理医用加速器手控器信号,并直接控制执行机构执行手控器按键指令,无法与医用加速器上位机进行通讯,医用加速器上位机无法在医用加速器手控器按键指令执行前判断医用加速器手控器的状态,无法判断医用加速器手控器按键指令是否安全。另外,现有的医用加速器手控器无专门的抗静电设计,抗静电能力不足,在产品注册时,无法满足EN 60601-1-2:2015标准中关于应用部分空气放电测试电压±15kV的要求。
发明内容
为解决上述技术问题,本发明提供一种医用加速器手控器,医用加速器上位机可以对医用加速器手控器所发出的所有指令进行判断和整机控制,提高医用加速器整机的安全性。
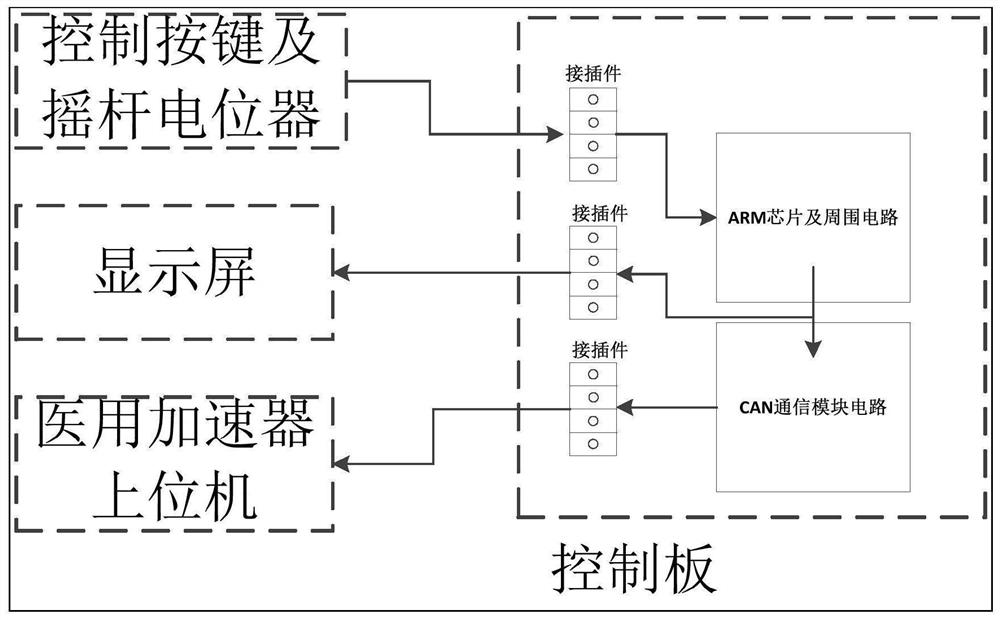
本发明所述医用加速器手控器,包括控制板、控制按键、摇杆电位器、显示屏和操作面板,所述操作面板上嵌入显示屏、控制按键和摇杆电位器,所述摇杆电位器、控制按键和显示屏均连接至控制板,控制板通过CAN通信模块与医用加速器上位机通信。
本发明设有控制板,控制按键和摇杆电位器的控制信号通过控制板转换后通过通信模块传输到医用加速器上位机,医用加速器上位机再通过CAN通信的方式发送到相应的执行机构,此种方式一方面可以大大减少信号传输线缆线芯的数量,方便改进医用加速器的工艺设计,另一方面可以提升医用加速器手控器的功能,医用加速器手控器所有按键的功能最终通过医用加速器上位机下发指令实现,医用加速器上位机可以对医用加速器手控器所发出的所有指令进行判断和整机控制,提高医用加速器整机的安全性。
优选地,所述控制板包括ARM芯片及周围电路、分别与ARM芯片连接的摇杆电位器信号输入电路、按键输入电路和使能电路,控制按键与按键输入电路匹配设置,摇杆电位器信号输出端通过摇杆电位器信号输入电路连接至ARM芯片。
优选地,所述操作面板底面粘贴有抗静电层,防止静电对医用加速器手控器造成的功能异常,防止静电损坏用医用加速器手控器硬件功能,继而防止静电通过医用加速器手控器后破坏医用加速器的其他部件及其功能。
优选地,所述控制按键包括灯光控制按键、运动选择按键、复选按键、执行按键、确认按键和使能按键,其中灯光控制按键和运动选择按键为一键复用,按下复选按键后,运动选择按键和灯光控制按键转换为数值输入按键。
优选地,控制按键的控制方法包括:
S1:按下床控器的灯光控制按键,床控器的控制板接收到信号后,转换成数字信号指令,通过CAN通信模块发送到医用加速器上位机,医用加速器上位机通过CAN通信模块将灯光控制信号发送到执行机构;
S2:按下床控器的运动选择按键,显示屏显示该控制按键功能,调节摇杆电位器,同时按住使能按键,使能信号通过操作面板传输到控制板,摇杆电位器信号通过电位器信号输入电路传输到ARM芯片,ARM芯片将接收到的信号转换为运动指令,通过CAN通信模块发送至医用加速器上位机,医用加速器上位机通过CAN通信模块将运动指令发送到执行机构,此种状态下,首先通过运动选择按键选择执行机构的动作模式,然后再通过摇杆电位器调整执行机构的具体动作方向,例如,按下横向控制按键后,相应的执行机构确定进行横向位置的调节,但具体是左移还是右移由摇杆电位器进行控制,执行机构位置调整到位后,释放摇杆电位器即可,此种调整方式较为随意,主要靠操作人员经验及肉眼判断,精度较低;
S3:依次按下床控器的运动选择按键、复选按键、数值输入按键、确认按键,同时按住执行按键和使能按键,通过数值输入按键输入调整数值,按键信号通过按键输入电路发送至ARM芯片,ARM芯片将接收到的按键信号转换为运动指令,通过CAN通信模块发送到医用加速器上位机,医用加速器上位机通过CAN通信模块将运动指令发送到执行机构,此种状态下,执行机构进行自动调整,首先按下运动选择按键,选择治疗床的动作模式,然后按下复选按键,运动选择按键和灯光控制按键切换为数值输入按键,通过数值输入按键输入治疗床的目标调整位置,调整到位后,治疗床停止动作,此种调整方式精度较高,对操作人员经验依赖程度低。
优选地,所述使能按键包括三个并联的独立按键,分设于操作面板的不同位置,例如三个使能按键分别设于操作面板的顶面、左侧面和右侧面,不论按下哪个使能按键,均能触发使能信号。
与现有技术相比,本发明具有以下有益效果:
1)本发明设有ARM芯片及周围电路,所有控制按键的功能通过ARM芯片及周围电路的信号处理,再通过CAN通信模块传输到医用加速器上位机,医用加速器上位机再通过CAN通信的方式发送到对应的执行机构,这种设计方式一是可以大大减少信号传输线缆线芯的数量,方便改进医用加速器的工艺设计,二是可以提升医用加速器手控器的功能,医用加速器手控器所有按键的功能最终通过医用加速器上位机下发指令实现,医用加速器上位机可以对医用加速器手控器所发出的所有指令进行判断和整机控制,提高医用加速器整机的安全性;
2)本发明设有抗静电层,防止静电对医用加速器手控器造成的功能异常,防止静电损坏用医用加速器手控器硬件功能,继而防止静电通过医用加速器手控器后破坏医用加速器的其他部件及其功能。
附图说明
图1现有医用加速器手控器结构图。
图2本发明结构框图。
图3控制板原理图。
图4按键输入和使能电路原理图及控制按键功能说明。
图5CAN通信模块电路原理图。
图6摇杆电位器信号输入电路原理图。
图7ARM芯片及周围电路原理图。
具体实施方式
实施例1:
如图2所示,本发明所述医用加速器手控器,包括控制板、控制按键、摇杆电位器、显示屏和操作面板,所述操作面板上嵌入显示屏、控制按键和摇杆电位器,所述摇杆电位器、控制按键和显示屏均连接至控制板,控制板通过CAN通信模块与医用加速器上位机通信。
如图3所示,所述控制板包括ARM芯片及周围电路、分别与ARM芯片连接的摇杆电位器信号输入电路、按键输入电路和使能电路,控制按键与按键输入电路匹配设置,摇杆电位器信号输出端通过摇杆电位器信号输入电路连接至ARM芯片,CAN通信模块电路如图4所示,控制按键与按键输入电路匹配设置,摇杆电位器信号输出端通过摇杆电位器信号输入电路连接至ARM芯片。
控制按键包括灯光控制按键、运动选择按键、复选按键、执行按键、确认按键和使能按键,其中运动选择按键和灯光控制按键为一键复用,按下复选按键后,运动选择按键和灯光控制按键转换为数值输入按键。如图4所示,灯光控制按键包括射野灯控制按键S1、测距灯控制按键S4、激光灯控制按键S2和室灯控制按键S3,执行按键S6,确认按键S9,复选按键S7,清除按键S8,运动选择按键包括治疗床升降控制按键S10、治疗床纵向控制按键S11、治疗床横向控制按键S12、治疗床公转控制按键S13、机架控制按键S14、治疗头控制按键S15、X向钨门控制按键S16-S18、Y向钨门控制按键S19-S21,按下复选按键S7后,控制按键S13转换为数字0输入键,控制按键S16转换为数字1输入键,控制按键S17转换为数字2输入键,控制按键S18转换为数字3输入键,控制按键S13转换为数字4输入键,控制按键S14转换为数字5输入键,控制按键S15转换为数字6输入键,控制按键S10转换为数字7输入键,控制按键S11转换为数字8输入键,控制按键S12转换为数字9输入键,其余按键转换见图4,不再一一列举,使能按键包括三个并联的独立按键S22、S23、S24,分设于操作面板的顶面、左侧面和右侧面,不论按下哪个使能按键,均能触发使能信号,使用方便。
如图5所示,摇杆电位器连接端子5J241的1号管脚通过基准电压采集电路连接至ARM芯片,摇杆电位器连接端子5J241的2号管脚通过反馈信号采集电路连接至ARM芯片,基准电压采集电路和反馈信号采集电路的电路原理相同,电路主体为电压跟随电路,电压跟随电路输出端连接至ARM芯片,电压跟随电路的输出端还设置两个二极管,两个二极管用于保证电压跟随电路的输出端的输出电压值保持在0-3.3V。
控制按键的控制方法包括:
S1:按下床控器的灯光控制按键,床控器的控制板接收到信号后,转换成数字信号指令,通过CAN通信模块发送到医用加速器上位机,医用加速器上位机通过CAN通信模块将灯光控制信号发送到执行机构;
S2:按下床控器的运动选择按键,显示屏显示该控制按键功能,调节摇杆电位器,同时按住使能按键,使能信号通过操作面板传输到控制板,摇杆电位器信号通过电位器信号输入电路传输到ARM芯片,ARM芯片将接收到的信号转换为运动指令,通过CAN通信模块发送至医用加速器上位机,医用加速器上位机通过CAN通信模块将运动指令发送到执行机构,此种状态下,首先通过运动选择按键选择执行机构的动作模式,然后再通过摇杆电位器调整执行机构的具体动作方向,例如,按下横向控制按键后,相应的执行机构确定进行横向位置的调节,但具体是左移还是右移由摇杆电位器进行控制,执行机构位置调整到位后,释放摇杆电位器即可,此种调整方式较为随意,主要靠操作人员经验及肉眼判断,精度较低;
S3:依次按下床控器的运动选择按键、复选按键、数值输入按键、确认按键,同时按住执行按键和使能按键,通过数值输入按键输入调整数值,按键信号通过按键输入电路发送至ARM芯片,ARM芯片将接收到的按键信号转换为运动指令,通过CAN通信模块发送到医用加速器上位机,医用加速器上位机通过CAN通信模块将运动指令发送到执行机构,此种状态下,执行机构进行自动调整,首先按下运动选择按键,选择治疗床的动作模式,然后按下复选按键,运动选择按键和灯光控制按键切换为数值输入按键,通过数值输入按键输入治疗床的目标调整位置,调整到位后,治疗床停止动作,此种调整方式精度较高,对操作人员经验依赖程度低。
操作面板底面粘贴有抗静电层,防止静电对医用加速器手控器造成的功能异常,防止静电损坏用医用加速器手控器硬件功能,继而防止静电通过医用加速器手控器后破坏医用加速器的其他部件及其功能。
本发明设有控制板,控制按键和摇杆电位器的控制信号通过控制板转换后通过通信模块传输到医用加速器上位机,医用加速器上位机再通过CAN通信的方式发送到相应的执行机构,此种方式一方面可以大大减少信号传输线缆线芯的数量,方便改进医用加速器的工艺设计,另一方面可以提升医用加速器手控器的功能,医用加速器手控器所有按键的功能最终通过医用加速器上位机下发指令实现,医用加速器上位机可以对医用加速器手控器所发出的所有指令进行判断和整机控制,提高医用加速器整机的安全性。
- 医用加速器手控器
- 医用加速器的无线式的手控盒