信号解释系统以及车辆控制系统
文献发布时间:2023-06-19 09:46:20
技术领域
本发明涉及应用于进行自动驾驶的车辆的信号解释系统,该信号解释系统解释信号机(交通信号灯)的点亮(亮灯)状态从而设定车辆行动模式(pattern)。另外,本发明涉及具备该信号解释系统的车辆控制系统。
背景技术
专利文献1公开了一种检测信号机及其状态的方法。该方法首先使用搭载于车辆的传感器扫描对象区域(target area),取得与对象区域有关的信息(图像)。在此,对象区域指的是存在信号机的典型区域。接下来,该方法根据对象区域信息检测信号机,并检测该信号机的位置。再者,该方法基于亮度判定所检测出的信号机的状态(绿(青)灯、黄灯、红灯或者不详)。例如,在绿灯的亮度最高的情况下,判定为检测出的信号机的状态为绿灯。
现有技术文献
专利文献1:美国专利申请公开第2013/0253754号说明书
发明内容
发明所要解决的问题
车辆按照信号机的点亮状态(信号显示)行驶。为了实现车辆的自动驾驶,重要的是不仅要识别信号机的点亮状态,而且要解释所识别的点亮状态的意思从而设定与点亮状态相应的适当的车辆行动模式。然而,仅基于信号机的点亮状态的识别结果所得到的车辆行动模式不一定都适当。
本发明的一个目的在于,提供能够解释信号机的点亮状态从而更适当地设定车辆行动模式的技术。
用于解决问题的技术方案
第1观点涉及应用于进行自动驾驶的车辆的信号解释系统。
所述信号解释系统具备一个或多个处理器以及一个或多个存储装置,所述一个或多个处理器至少设定所述车辆相对于设置有信号机的对象区域的行动模式。
在所述一个或多个存储装置中保存:
表示所述信号机的点亮状态的信号状态信息;
表示所述信号机的所述点亮状态与所述行动模式之间的对应关系的对应模式信息;以及
表示允许或禁止所述行动模式的转变的规则的规则信息。
所述一个或多个处理器,
参照所述对应模式信息,取得与由所述信号状态信息所示的所述点亮状态相关联的所述行动模式作为暂定行动模式,
在所述暂定行动模式是从上次的所述行动模式转变成的不同的模式的情况下,通过修正从上次的所述行动模式向所述暂定行动模式的转变以使得与由所述规则信息所示的所述规则匹配,从而设定本次的所述行动模式。
第2观点涉及应用于进行自动驾驶的车辆的信号解释系统。
所述信号解释系统具备一个或多个处理器以及一个或多个存储装置,所述一个或多个处理器至少设定所述车辆相对于设置有信号机的对象区域的行动模式。
在所述一个或多个存储装置中保存:
表示所述信号机的点亮状态的信号状态信息;
表示所述信号机的所述点亮状态与所述行动模式之间的对应关系的对应模式信息;以及
表示所述车辆周围的周边车辆相对于所述对象区域的车辆行为的周边车辆信息。
所述一个或多个处理器,
参照所述对应模式信息,取得与由所述信号状态信息所示的所述点亮状态相关联的所述行动模式作为暂定行动模式,
通过修正所述暂定行动模式以使得与所述周边车辆的所述车辆行为匹配,从而设定所述行动模式。
第3观点涉及具备上述信号解释系统的车辆控制系统。
所述一个或多个处理器基于所述行动模式生成所述自动驾驶中的所述车辆的行驶计划,控制所述车辆以使所述车辆按照所述行驶计划行驶。
发明效果
根据第1观点,信号解释系统基于信号状态信息、对应模式信息和规则信息,设定车辆相对于设置有信号机的对象区域的行动模式。更详细而言,信号解释系统参照对应模式信息,取得与由信号状态信息所示的点亮状态相关联的行动模式作为暂定行动模式。规则信息表示允许或禁止行动模式的转变的规则。在暂定行动模式是从上次的行动模式转变成的不同的模式的情况下,信号解释系统通过修正从上次的行动模式向暂定行动模式的转变以使得与由规则信息所示的规则匹配,从而设定本次的行动模式。由此,能够更适当地设定相对于对象区域的行动模式。
根据第2观点,信号解释系统基于信号状态信息、对应模式信息和周边车辆信息,设定车辆相对于设置有信号机的对象区域的行动模式。更详细而言,信号解释系统参照对应模式信息,取得与由信号状态信息所示的点亮状态相关联的行动模式作为暂定行动模式。周边车辆信息表示周边车辆相对于对象区域的车辆行为。信号解释系统通过修正暂定行动模式以使得与周边车辆的车辆行为匹配,从而设定行动模式。由此,能够更适当地设定相对于对象区域的行动模式。
附图说明
图1是用于对本发明的第1实施方式的概要进行说明的概念图。
图2是表示本发明的第1实施方式中的基本行动模式的例子的概念图。
图3是用于对本发明的第1实施方式中的与信号机的点亮状态LG相关联的行动模式进行说明的概念图。
图4是用于对本发明的第1实施方式中的行动模式的优先顺序进行说明的概念图。
图5是用于对本发明的第1实施方式中的与信号机的点亮状态LY相关联的行动模式进行说明的概念图。
图6是用于对本发明的第1实施方式中的与信号机的点亮状态LR相关联的行动模式进行说明的概念图。
图7是用于对本发明的第1实施方式中的与信号机的点亮状态LA1相关联的行动模式进行说明的概念图。
图8是用于对本发明的第1实施方式中的与信号机的点亮状态LA2相关联的行动模式进行说明的概念图。
图9是用于对本发明的第1实施方式中的与信号机的点亮状态LB1相关联的行动模式进行说明的概念图。
图10是用于对本发明的第1实施方式中的与信号机的点亮状态LB2相关联的行动模式进行说明的概念图。
图11是用于对本发明的第1实施方式中的与信号机的点亮状态LR'相关联的行动模式进行说明的概念图。
图12是用于对本发明的第1实施方式中的与信号机的点亮状态LW相关联的行动模式进行说明的概念图。
图13是用于对本发明的第1实施方式中的与信号机的点亮状态LX相关联的行动模式进行说明的概念图。
图14是用于对本发明的第1实施方式中的与信号机的点亮状态LC1相关联的行动模式进行说明的概念图。
图15是用于对本发明的第1实施方式中的与信号机的点亮状态LC2相关联的行动模式进行说明的概念图。
图16是表示本发明的第1实施方式涉及的信号解释系统的功能构成例的框图。
图17是概要地表示本发明的第1实施方式涉及的信号解释系统的处理的流程图。
图18是表示本发明的第1实施方式涉及的信号解释系统的第1构成例的框图。
图19是表示本发明的第1实施方式涉及的传感器群组和驾驶环境信息的例子的框图。
图20是表示本发明的第1实施方式涉及的信号解释系统的第2构成例的框图。
图21是表示本发明的第2实施方式涉及的信号解释系统的功能构成例的框图。
图22是用于对本发明的第2实施方式涉及的规则信息的一例进行说明的概念图。
图23是表示本发明的第2实施方式涉及的信号解释系统的处理的流程图。
图24是用于对本发明的第2实施方式涉及的信号解释系统的第1应用例进行说明的概念图。
图25是用于对本发明的第2实施方式涉及的信号解释系统的第1应用例进行说明的概念图。
图26是用于对本发明的第2实施方式涉及的信号解释系统的第1应用例进行说明的概念图。
图27是用于对本发明的第2实施方式涉及的信号解释系统的第2应用例进行说明的概念图。
图28是用于对本发明的第2实施方式涉及的信号解释系统的第2应用例进行说明的概念图。
图29是用于对本发明的第2实施方式涉及的信号解释系统的第2应用例进行说明的概念图。
图30是用于对本发明的第3实施方式涉及的规则信息的一例进行说明的概念图。
图31是用于对本发明的第3实施方式涉及的信号解释系统的应用例进行说明的概念图。
图32是用于对本发明的第4实施方式涉及的规则信息的一例进行说明的概念图。
图33是用于对本发明的第4实施方式涉及的信号解释系统的应用例进行说明的概念图。
图34是表示本发明的第5实施方式涉及的信号解释系统的功能构成例的框图。
图35是用于对本发明的第5实施方式涉及的规则信息的一例进行说明的概念图。
图36是用于对本发明的第5实施方式涉及的规则信息的另一例进行说明的概念图。
图37是用于对本发明的第5实施方式涉及的规则信息的另一例进行说明的概念图。
图38是用于对本发明的第5实施方式涉及的规则信息的另一例进行说明的概念图。
图39是表示本发明的第6实施方式涉及的信号解释系统的功能构成例的框图。
图40是表示本发明的第6实施方式涉及的信号解释系统的处理的流程图。
图41是用于对本发明的第6实施方式涉及的信号解释系统的第1应用例进行说明的概念图。
图42是用于对本发明的第6实施方式涉及的信号解释系统的第2应用例进行说明的概念图。
图43是用于对本发明的第6实施方式涉及的信号解释系统的第3应用例进行说明的概念图。
图44是用于对本发明的第6实施方式涉及的信号解释系统的第4应用例进行说明的概念图。
图45是用于对本发明的第6实施方式涉及的信号解释系统的第5应用例进行说明的概念图。
标号说明
1车辆;2对向车辆;3交叉(穿越)车辆;10信号解释系统;20行动模式设定部;30周边车辆分析部;100车载装置;110传感器群组;120通信装置;130行驶装置;140控制装置;150处理器;160存储装置;200外部装置;220通信装置;240控制装置;250处理器;260存储装置;300存储装置;400存储装置;SG信号机;TA对象区域;CRC修正信息;ENV驾驶环境信息;MAP地图信息;PAT对应模式信息;RES结果信息;RUL规则信息;SST信号状态信息;SUV周边车辆信息。
具体实施方式
参照附图,说明本发明的实施方式。
1.第1实施方式
1-1.信号解释系统
图1是用于对第1实施方式的概要进行说明的概念图。在车辆1的前方设置有信号机SG(交通信号机)。车辆1按照信号机SG的点亮状态(信号显示)行驶。以下,将车辆1要考虑信号机SG的点亮状态而行驶的区域称为“对象区域TA”。也即是说,对象区域TA指的是设置有信号机SG的区域,是受该信号机SG的点亮状态控制的区域。作为对象区域TA,例如有交叉路口与其周边、道口与其周边、人行横道与其周边等。
作为相对于设置有信号机SG的对象区域TA的车辆行动,可考虑各种模式。以下,将这种车辆行动的模式称为“行动模式”。行动模式也可以说是有可能的车辆行动、或者车辆行动的候选。
图2是表示基本行动模式的例子的概念图。各行动模式的内容如下。
[行动模式PG]可以前行
[行动模式PY]无法安全停止的情况下可以前行
[行动模式PR]不准超过停止位置,或者要在停止位置之前停止
[行动模式PSL]可以慢行、也即是说以一定速度以下的低速前行
[行动模式PST]在暂停后可以前行
[行动模式PX]不清楚(不明、不详)(信号机SG的点亮状态不清楚)
为了实现车辆1的自动驾驶,重要的是不仅要识别信号机SG的点亮状态,而且要解释所识别的点亮状态的意思从而设定与点亮状态相应的适当的行动模式。进行这种信号解释的即是本实施方式涉及的“信号解释系统10”。
信号解释系统10应用于进行自动驾驶的车辆1。信号解释系统10解释信号机SG的点亮状态,从而适当地设定相对于设置有信号机SG的对象区域TA的行动模式。典型地,信号解释系统10搭载于车辆1。或者,信号解释系统10也可以配置于车辆1外部的外部装置,远程地设定行动模式。或者,信号解释系统10也可以分布式地配置于车辆1和外部装置。信号解释系统10也可以是对车辆1的自动驾驶进行控制的自动驾驶系统(车辆控制系统)的一部分。
1-2.信号机的点亮状态与行动模式的对应关系
为了解释信号机SG的点亮状态,要预先定义信号机SG的点亮状态与行动模式的对应关系。以下,说明关于信号机SG的点亮状态与行动模式的对应关系的各种例子。此外,适当省略重复的说明。
<点亮状态LG>
图3是用于对与信号机SG的点亮状态LG相关联的行动模式进行说明的概念图。点亮状态LG相当于“绿灯信号”。也即是说,信号机SG的绿色的圆形的灯(灯火)部分点亮。
此外,灯部分意味着信号机SG中的点亮及熄灭的部分。作为灯部分,例如有灯泡、LED(Light Emitting Diode,发光二极管)、发光装置、显示器等。在图3及之后的附图中,大写字母“G”、“Y”、“R”分别意味着绿色、黄色、红色的灯部分点亮。
在图3所示的例子中,对象区域TA为交叉路口。由于点亮状态LG意味着绿灯信号,因此直行方向的车辆1的行动模式被设定为行动模式PG、即“可以前行”。同样地,左转方向以及右转方向的车辆1的行动模式也被设定为行动模式PG。由图3可知,行动模式按车辆1的行进方向来设定。车辆1的实际行动(直行、左转或者右转)根据目的地、行驶计划、周围的状况等适当决定。在该意义上,行动模式也可以说是有可能的车辆行动、或者车辆行动的候选。
在行动模式PG的情况下,车辆1被允许进入对象区域TA内。在该情况下,为了车辆1的行驶控制、安全确保等,期望也预先掌握与车辆1的行动模式PG交叉或者合流的其他车辆的行动模式。作为其他车辆,可列举出对向车辆2和交叉车辆3。
对向车辆2有可能存在于与车辆1所在的自身车道相对向的对向车道。典型地,在对于自身车道的信号机SG的点亮状态为绿灯信号的情况下,对于对向车道的信号机(未图示)的点亮状态也为绿灯信号。由此,对向车辆2的行动模式对于直行方向、左转方向和右转方向中的各方向而被设定为行动模式PG。
交叉车辆3有可能存在于与车辆1所在的自身车道相交叉的交叉车道。典型地,在对于自身车道的信号机SG的点亮状态为绿灯信号的情况下,对于交叉车道的信号机(未图示)的点亮状态为红灯信号。由此,交叉车辆3的行动模式对于直行方向、左转方向和右转方向中的各方向而被设定为行动模式PR。
由图3可知,在对象区域TA内,车辆1的行动模式PG与对向车辆2的行动模式PG彼此交叉或者合流。为了实现安全的车辆行驶,优选为预先设定行动模式PG的优先顺序。
图4是用于对行动模式PG的优先顺序进行说明的概念图。图4中的标号PG附带有意味着优先顺序的数字i(i=1、2、3)。行动模式PG1的优先级最高,行动模式PG3的优先级最低。例如,车辆1的行进方向的行动模式PG1比对向车辆2的右转方向的行动模式PG3优先。作为另一例,对向车辆2的左转方向的行动模式PG2比车辆1的右转方向的行动模式PG3优先。相同优先顺序i的行动模式PGi彼此间既不交叉也不合流。
<点亮状态LY>
图5是用于对与点亮状态LY相关联的行动模式进行说明的概念图。点亮状态LY相当于“黄灯信号”。也即是说,信号机SG的黄色的圆形的灯部分点亮。
车辆1的行动模式对于直行方向、左转方向和右转方向中的各方向而被设定为行动模式PY。对向车辆2的行动模式对于直行方向、左转方向和右转方向中的各方向而被设定为行动模式PY。交叉车辆3的行动模式对于直行方向、左转方向和右转方向中的各方向而被设定为行动模式PR。
此外,行动模式PY彼此间的优先顺序与图4中所示的例子的情况是同样的。
<点亮状态LR>
图6是用于对与点亮状态LR相关联的行动模式进行说明的概念图。点亮状态LR相当于“红灯信号”。也即是说,信号机SG的红色的圆形的灯部分点亮。
车辆1的行动模式对于直行方向、左转方向和右转方向中的各方向而被设定为行动模式PR。
在车辆1的行动模式为行动模式PR的情况下,对向车辆2以及交叉车辆3的行动模式也可以不被设定。或者,也可以为,对向车辆2的行动模式被设定为行动模式PR,交叉车辆3的行动模式被设定为行动模式PG。
<点亮状态LA1>
图7是用于对与点亮状态LA1相关联的行动模式进行说明的概念图。在点亮状态LA1下,在上述的点亮状态LR(参照图6)的基础上,还点亮了允许右转的右箭头信号。
直行方向以及左转方向的车辆1的行动模式与点亮状态LR的情况同样地被设定为行动模式PR。另一方面,右转方向的车辆1的行动模式被设定为行动模式PG、即“可以前行”。如此,与点亮状态LA1相关联的车辆1的行动模式由多个基本行动模式的组合来表示。
与车辆1的行动模式PG交叉或者合流的对向车辆2的行动模式为行动模式PR。与车辆1的行动模式PG交叉或者合流的交叉车辆3的行动模式为行动模式PR。
<点亮状态LA2>
图8是用于对与点亮状态LA2相关联的行动模式进行说明的概念图。在点亮状态LA2下,在上述的点亮状态LR(参照图6)的基础上,还点亮了允许直行的上箭头信号和允许左转的左箭头信号。
右转方向的车辆1的行动模式与点亮状态LR的情况同样地被设定为行动模式PR。另一方面,直行方向以及左转方向的车辆1的行动模式被设定为行动模式PG、即“可以前行”。如此,与点亮状态LA2相关联的车辆1的行动模式由多个基本行动模式的组合来表示。
与车辆1的行动模式PG交叉或者合流的对向车辆2的行动模式为行动模式PR。与车辆1的行动模式PG交叉或者合流的交叉车辆3的行动模式为行动模式PR。
<点亮状态LB1>
图9是用于对与点亮状态LB1相关联的行动模式进行说明的概念图。点亮状态LB1相当于“黄灯闪烁信号”。也即是说,信号机SG的黄色的圆形的灯部分闪烁。
车辆1的行动模式对于直行方向、左转方向和右转方向中的各方向而被设定为行动模式PSL。对向车辆2的行动模式对于直行方向、左转方向和右转方向中的各方向而被设定为行动模式PSL。交叉车辆3的行动模式对于直行方向、左转方向和右转方向中的各方向而被设定为行动模式PST。
此外,行动模式PSL彼此间的优先顺序与图4中所示的例子的情况是同样的。另外,行动模式PSL的优先级比行动模式PST的优先级高。
<点亮状态LB2>
图10是用于对与点亮状态LB2相关联的行动模式进行说明的概念图。点亮状态LB2相当于“红灯闪烁信号”。也即是说,信号机SG的红色的圆形的灯部分闪烁。
车辆1的行动模式对于直行方向、左转方向和右转方向中的各方向而被设定为行动模式PST。对向车辆2的行动模式对于直行方向、左转方向和右转方向中的各方向而被设定为行动模式PST。交叉车辆3的行动模式对于直行方向、左转方向和右转方向中的各方向而被设定为行动模式PG(或者行动模式PSL)。
此外,行动模式PST彼此间的优先顺序与图4中所示的例子的情况是同样的。另外,行动模式PST的优先级比行动模式PG的优先级低。
<点亮状态LR'>
图11是用于对与点亮状态LR'相关联的行动模式进行说明的概念图。点亮状态LR'相当于包括例外的红灯信号。具体而言是,即使是红灯信号,如果安全的话,也允许左转。这相当于例如美国的“即使是红灯信号,如果安全的话,也允许右转”。
交叉车辆3的行动模式为行动模式PG。直行方向以及右转方向的车辆1的行动模式与点亮状态LR(参照图6)的情况同样地被设定为行动模式PR。另一方面,左转方向的车辆1的行动模式被设定为行动模式PST、即“在暂停后可以前行”。行动模式PST的优先级比行动模式PG的优先级低。
此外,例外的信号机SG例如能够通过利用信号机地图信息来掌握。信号机地图信息将信号机SG的“绝对坐标系中的位置”与“种类”相关联地表示。例如,基于表示车辆1的位置的位置信息和摄像头拍摄信息,能够算出由摄像头拍摄到的信号机SG在绝对坐标系中的位置。而且,通过参照信号机地图信息,能够掌握该信号机SG的种类。
<点亮状态LW>
图12是用于对与点亮状态LW相关联的行动模式进行说明的概念图。点亮状态LW是车辆用信号机的点亮状态与行人用信号机的点亮状态的组合。具体而言,车辆用信号机为绿灯信号,行人用信号机为红灯信号。由于行人用信号机为红灯信号,因此能预测到车辆用信号机不久会从绿灯信号变为黄灯信号。由此,各行动模式被设定为与相当于黄灯信号的上述点亮状态LY(参照图5)的情况下相同。
<点亮状态LX>
图13是用于对与点亮状态LX相关联的行动模式进行说明的概念图。点亮状态LX意味着信号机SG的点亮状态不清楚。作为点亮状态LX的原因,可考虑如下例子。
(a)没能很好地确定信号机SG的点亮状态(例如颜色)
(b)信号机SG由卡车等遮挡而不可见
(c)由于故障或者停电,信号机SG没有点亮
在点亮状态LX的情况下,车辆1的行动模式被设定为行动模式PX。例如,行动模式PX与行动模式PR同样地为“要在停止位置之前停止”。对向车辆2以及交叉车辆3的行动模式也被设定为行动模式PX。
<点亮状态LC1、LC2>
设置有信号机SG的对象区域TA不限定于交叉路口。在图14以及图15所示的例子中,对象区域TA为铁轨的道口及其周边。
图14是用于对与点亮状态LC1相关联的行动模式进行说明的概念图。在点亮状态LC1下,两个红色的灯部分交替地点亮。也即是说,点亮状态LC1意味着“禁止进入”。车辆1的行动模式被设定为行动模式PR。
图15是用于对与点亮状态LC2相关联的行动模式进行说明的概念图。在点亮状态LC2下,两个红色的灯部分均熄灭。也即是说,点亮状态LC1意味着“允许进入”。车辆1的行动模式被设定为行动模式PST。
1-3.行动模式设定处理
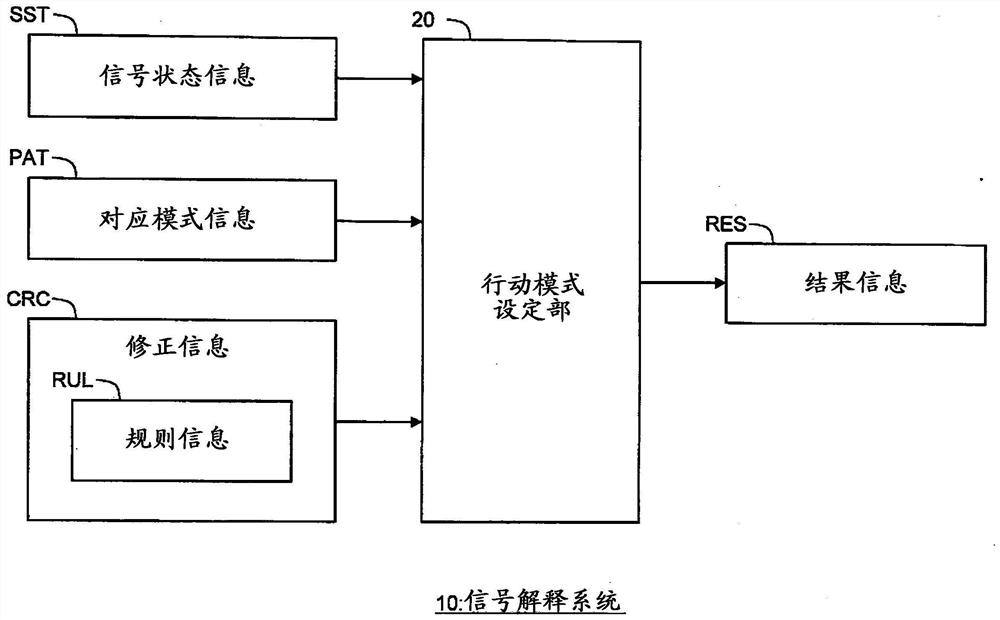
图16是表示本实施方式涉及的信号解释系统10的功能构成例的框图。信号解释系统10具备行动模式设定部20。行动模式设定部20至少设定车辆1相对于设置有信号机SG的对象区域TA的行动模式。行动模式设定部20也可以设定对向车辆2和/或交叉车辆3相对于相同对象区域TA的行动模式(参照图3、图5、图7、图8等)。以下,将设定相对于设置有信号机SG的对象区域TA的行动模式的处理称为“行动模式设定处理”。
根据本实施方式,行动模式设定部20基于信号状态信息SST、对应模式信息PAT以及修正信息CRC,进行行动模式设定处理。
信号状态信息SST表示信号机SG的点亮状态。如图3~图15中所示的,作为信号机SG的点亮状态,可考虑各种例子。典型地,点亮状态由点亮部分(点亮着的灯部分)的“颜色(绿、黄、红等)”和“形状(圆、箭头等)”的组合来规定。点亮状态也可以包括点亮部分是否在闪烁。也存在点亮状态不清楚的情况。
信号机SG的点亮状态例如通过使用搭载于车辆1的摄像头(camera)来识别。摄像头拍摄车辆1周围的状况。摄像头拍摄信息包含由摄像头拍摄到的图像、即表示车辆1周围的状况的图像。从该图像中检测(提取)信号机SG并识别所检测出的信号机SG的点亮状态的图像解析方法是众所周知的(例如,参照专利文献1)。信号状态信息SST表示信号机SG的点亮状态的识别结果。
作为另一例,信号机SG也可以具有发布自身点亮状态的功能。在该情况下,使用从信号机SG发布的信息作为信号状态信息SST。
对应模式信息PAT表示信号机SG的点亮状态与行动模式之间的对应关系。信号机SG的点亮状态与行动模式之间的对应关系如图3~图15中例示的那样。该对应模式信息PAT被预先制作。
通过参照对应模式信息PAT,能够取得与由信号状态信息SST所示的点亮状态相关联的行动模式。但是,仅基于信号状态信息SST和对应模式信息PAT所得到的行动模式不一定都适当。
作为一例,考虑信号机SG的点亮状态按照某个重复模式而随时间变化的情况。在该情况下,关于点亮状态,存在“前后关系(上下文)”。即使在某一定时(timing)的点亮状态与在另一定时的点亮状态乍一看是相同的,它们所表示的内容也可能会根据前后关系而不同。在对应模式信息PAT中,仅一对一地关联有点亮状态与行动模式,并没有考虑到点亮状态的前后关系。认为通过将信号机SG的点亮状态的前后关系也考虑在内,能够设定更适当的行动模式。
作为另一例,考虑虽然信号机SG的点亮状态从红灯信号变成了绿灯信号但是在交叉路口内仍然留有其他车辆的状况。在该状况下,从安全的观点来看,不希望车辆1马上进入交叉路口内。也即是说,仅基于信号机SG的点亮状态来设定行动模式不一定都适当。认为通过除了参考信号机SG的点亮状态之外还参考车辆1周围的周边车辆的行为,能够设定更适当的行动模式。
根据这样的观点,行动模式设定部20通过不仅考虑信号状态信息SST和对应模式信息PAT,而且将“修正信息CRC”也考虑在内来进行行动模式设定处理。修正信息CRC是用于进一步对基于信号状态信息SST和对应模式信息PAT所得到的行动模式进行修正的信息。作为修正信息CRC,可考虑各种例子。关于修正信息CRC的各种例子,将会在后面的实施方式中进一步详细说明。
图17是概要地表示本实施方式涉及的信号解释系统10的处理的流程图。图17所示的处理流程每隔一定周期重复执行。
在步骤S100中,行动模式设定部20取得最新的信号状态信息SST。
在步骤S200中,行动模式设定部20基于在步骤S100中取得的信号状态信息SST和预先制作的对应模式信息PAT,暂定地取得行动模式。具体而言,行动模式设定部20参照对应模式信息PAT,暂定地取得与由信号状态信息SST所示的点亮状态相关联的行动模式。以下,将在此取得的行动模式称为“暂定行动模式”。
在步骤S300中,行动模式设定部20基于修正信息CRC,适当地修正暂定行动模式,从而最终地设定相对于对象区域TA的行动模式。相对于对象区域TA的行动模式至少包括车辆1的行动模式。相对于对象区域TA的行动模式也可以包括对向车辆2和/或交叉车辆3的行动模式。
而且,行动模式设定部20生成并输出表示最终得到的行动模式的结果信息RES。该结果信息RES被利用于车辆1的行驶计划的制定、车辆1的行驶控制等。
1-4.信号解释系统的构成例
以下,对本实施方式涉及的信号解释系统10的具体的构成例进行说明。
1-4-1.第1构成例
图18是表示本实施方式涉及的信号解释系统10的第1构成例的框图。在第1构成例中,信号解释系统10由搭载于车辆1的车载装置100实现。
车载装置100具备传感器群组110、通信装置120、行驶装置130以及控制装置140。
传感器群组110取得表示车辆1的驾驶环境的驾驶环境信息ENV。
图19是表示传感器群组110和驾驶环境信息ENV的例子的框图。传感器群组110包括位置传感器111、周边状况传感器112以及车辆状态传感器114。驾驶环境信息ENV包括位置信息POS、周边状况信息SIT以及车辆状态信息STA。
位置传感器111检测车辆1的位置以及朝向。例如,位置传感器111包括检测车辆1的位置以及朝向的GPS(Global Positioning System)传感器。位置信息POS表示绝对坐标系中的车辆1的位置以及朝向。
周边状况传感器112检测车辆1周围的状况。周边状况传感器112包括摄像头113。摄像头113拍摄车辆1周围的状况。典型地,摄像头113设置为能够拍摄车辆1前方的状况。周边状况传感器112也可以还包括激光雷达(LIDAR:Laser Imaging Detection andRanging)和/或雷达(radar)。周边状况信息SIT是根据周边状况传感器112的检测结果所获得的信息。该周边状况信息SIT包含摄像头拍摄信息IMG。摄像头拍摄信息IMG包含由摄像头113拍摄到的图像、即表示车辆1周围的状况的图像。
车辆状态传感器114检测车辆1的状态。车辆1的状态包括车辆1的速度(车速)、加速度、转向角、偏航率(yaw rate)等。再者,车辆1的状态也包括由车辆1的驾驶员进行的驾驶操作。驾驶操作包括加速操作、刹车操作以及转向(操舵)操作。车辆状态信息STA表示由车辆状态传感器114检测出的车辆1的状态。
通信装置120与车辆1的外部进行通信。例如,通信装置120与车辆1外部的外部装置经由通信网络进行通信。
行驶装置130包括操舵装置、驱动装置和制动装置。操舵装置将车辆1的车轮进行转向。例如,操舵装置包括动力转向(EPS:Electric Power Steering)装置。驱动装置是产生驱动力的动力源。作为驱动装置,可例示电动机和发动机。制动装置产生制动力。
控制装置140控制车载装置100。控制装置140也被称为电子控制单元(ECU:Electronic Control Unit)。控制装置140具备处理器150以及存储装置160。处理器150执行保存于存储装置160的控制程序,由此实现各种处理。
例如,处理器150进行取得各种信息的信息取得处理。各种信息被保存于存储装置160。
具体而言,处理器150从传感器群组110取得驾驶环境信息ENV,将该驾驶环境信息ENV保存于存储装置160。
另外,处理器150从地图数据库MAP_DB取得所需的地图信息MAP,将该地图信息MAP保存于存储装置160。地图数据库MAP_DB被保存于存储装置300。存储装置300既可以是车载装置100的一部分,也可以设置在车辆1的外部。在地图数据库MAP_DB存在于车辆1的外部的情况下,处理器150通过通信装置120访问地图数据库MAP_DB,取得所需的地图信息MAP。
另外,处理器150取得信号状态信息SST,将该信号状态信息SST保存于存储装置160。例如,处理器150基于驾驶环境信息ENV(尤其是摄像头拍摄信息IMG)取得信号状态信息SST。更详细而言,处理器150从由摄像头拍摄信息IMG所示的图像中检测(提取)信号机SG,并识别所检测出的信号机SG的点亮状态。这种图像解析方法是众所周知的(例如,参照专利文献1)。作为另一例,在信号机SG具有发布自身点亮状态的功能的情况下,处理器150经由通信装置120接收该发布信息并将其作为信号状态信息SST。
另外,处理器150从对应模式数据库PAT_DB取得所需的对应模式信息PAT,将该对应模式信息PAT保存于存储装置160。对应模式数据库PAT_DB被保存于存储装置400。存储装置400既可以是车载装置100的一部分,也可以设置在车辆1的外部。在对应模式数据库PAT_DB存在于车辆1的外部的情况下,处理器150通过通信装置120访问对应模式数据库PAT_DB,取得所需的对应模式信息PAT。
另外,处理器150取得修正信息CRC,将该修正信息CRC保存于存储装置160。或者,也可以预先制作修正信息CRC并将其保存于存储装置160。关于修正信息CRC的各种例子,将会在后面的实施方式中进一步详细说明。
处理器150基于保存于存储装置160的信号状态信息SST、对应模式信息PAT和修正信息CRC,进行上述的行动模式设定处理。处理器150生成表示最终得到的行动模式的结果信息RES,将该结果信息RES保存于存储装置160。
处理器150基于结果信息RES和驾驶环境信息ENV,生成自动驾驶中的车辆1的行驶计划。例如,处理器150基于结果信息RES,取得与车辆1的目标行进方向有关的行动模式。另外,处理器150基于驾驶环境信息ENV,掌握车辆1周围的状况。而且,处理器150生成用于确保安全地实现行动模式(车辆行动)的行驶计划。典型地,行驶计划包括车辆1要遵循的目标轨迹。
再者,处理器150进行自动驾驶控制以使车辆1按照行驶计划(目标轨迹)行驶。自动驾驶控制包括操舵控制、加速控制和减速控制中的至少一方。处理器150通过使行驶装置130(操舵装置、驱动装置、制动装置)适当地工作,从而进行操舵控制、加速控制和减速控制中的所需的车辆行驶控制。
图16中所示的行动模式设定部20是处理器150的功能块。行动模式设定部20通过由处理器150执行保存于存储装置160的计算机程序来实现。
1-4-2.第2构成例
图20是表示本实施方式涉及的信号解释系统10的第2构成例的框图。在第2构成例中,信号解释系统10由车辆1的外部的外部装置200实现。外部装置200例如是管理服务器。
外部装置200具备通信装置220以及控制装置240。
通信装置220与外部装置200的外部进行通信。例如,通信装置220与车载装置100(参照图18)经由通信网络进行通信。
控制装置240控制外部装置200。控制装置240具备处理器250以及存储装置260。处理器250执行保存于存储装置260的控制程序,由此实现各种处理。
例如,处理器250进行取得各种信息的信息取得处理。各种信息被保存于存储装置260。
具体而言,处理器250通过通信装置220从车载装置100取得驾驶环境信息ENV。驾驶环境信息ENV被保存于存储装置260。
另外,处理器250从地图数据库MAP_DB取得所需的地图信息MAP,将该地图信息MAP保存于存储装置260。地图数据库MAP_DB被保存于存储装置300。存储装置300既可以是外部装置200的一部分,也可以设置在外部装置200的外部。在地图数据库MAP_DB存在于外部装置200的外部的情况下,处理器250通过通信装置220访问地图数据库MAP_DB,取得所需的地图信息MAP。
另外,处理器250取得信号状态信息SST,将该信号状态信息SST保存于存储装置260。信号状态信息SST的取得方法与上述第1构成例的情况是同样的。
另外,处理器250从对应模式数据库PAT_DB取得所需的对应模式信息PAT,将该对应模式信息PAT保存于存储装置260。对应模式数据库PAT_DB被保存于存储装置400。存储装置400既可以是外部装置200的一部分,也可以设置在外部装置200的外部。在对应模式数据库PAT_DB存在于外部装置200的外部的情况下,处理器250通过通信装置220访问对应模式数据库PAT_DB,取得所需的对应模式信息PAT。
另外,处理器250取得修正信息CRC,将该修正信息CRC保存于存储装置260。或者,也可以预先制作修正信息CRC并将其保存于存储装置260。
处理器250基于保存于存储装置260的信号状态信息SST、对应模式信息PAT和修正信息CRC,进行上述的行动模式设定处理。处理器250生成表示最终得到的行动模式的结果信息RES,将该结果信息RES保存于存储装置260。
处理器250也可以经由通信装置220将结果信息RES提供给车载装置100。车载装置100的处理器150基于结果信息RES和驾驶环境信息ENV生成车辆1的行驶计划,并进行自动驾驶控制。
图16中所示的行动模式设定部20是处理器250的功能块。行动模式设定部20通过由处理器250执行保存于存储装置260的计算机程序来实现。
1-4-3.第3构成例
信号解释系统10的功能也可以分布于车载装置100的处理器150和外部装置200的处理器250。处理中所需的信息也可以分布于车载装置100的存储装置160、外部装置200的存储装置260、存储装置300和存储装置400。所需的信息通过通信而由车载装置100和外部装置200共享。
上述的第1~第3构成例能够总结如下。即,信号解释系统10具备一个处理器(处理器150或者处理器250)或多个处理器(处理器150以及处理器250)。另外,信号解释系统10具备一个或多个存储装置(存储装置160、260、300、400)。信号解释系统10的处理中所需的信息保存于一个或多个存储装置。一个或多个处理器访问一个或多个存储装置来取得所需的信息,并基于取得的信息执行上述的处理。
1-5.车辆控制系统
本实施方式涉及的车辆控制系统包括上述的信号解释系统10,基于由信号解释系统10所设定的行动模式来控制车辆1。更详细而言,一个处理器(处理器150或者处理器250)或多个处理器(处理器150以及处理器250)基于由信号解释系统10所设定的行动模式,生成自动驾驶中的车辆1的行驶计划。而且,一个或多个处理器(150、250)控制车辆1以使车辆1按照行驶计划行驶。车辆1的控制(自动驾驶控制)包括操舵控制、加速控制和减速控制中的至少一方。车载装置100的处理器150通过使行驶装置130(操舵装置、驱动装置、制动装置)适当地工作,从而进行操舵控制、加速控制和减速控制中的所需的车辆行驶控制。
1-6.效果
如上所述,根据本实施方式,信号解释系统10基于信号状态信息SST、对应模式信息PAT和修正信息CRC,设定车辆1相对于设置有信号机SG的对象区域TA的行动模式。更详细而言,信号解释系统10参照对应模式信息PAT,取得与由信号状态信息SST所示的点亮状态相关联的行动模式作为暂定行动模式。再者,信号解释系统10通过基于修正信息CRC来修正暂定行动模式,从而最终地设定行动模式。
仅基于信号状态信息SST和对应模式信息PAT而简单设定的行动模式不一定都适当。根据本实施方式,由于还考虑修正信息CRC以适当修正行动模式,因而能够更适当地设定车辆1相对于对象区域TA的行动模式。
以下,对修正信息CRC的各种例子进行更详细的说明。
2.第2实施方式
2-1.概要
图21是表示第2实施方式涉及的信号解释系统10的功能构成例的框图。将会适当省略与第1实施方式重复的说明。根据本实施方式,修正信息CRC包含规则信息RUL。规则信息RUL表示与“行动模式的转变(变化)”有关的规则。更详细而言,规则信息RUL表示允许或者禁止行动模式的转变的规则。
图22是用于对规则信息RUL的一例进行说明的概念图。在图22所示的例子中,规则信息RUL规定了与四种行动模式PG、PY、PR、PX之间的转变有关的规则。具体而言,允许从行动模式PG向行动模式PY的转变,但禁止从行动模式PY向行动模式PG的转变。允许从行动模式PY向行动模式PR的转变,但禁止从行动模式PR向行动模式PY的转变。允许从行动模式PR向行动模式PG的转变,但禁止从行动模式PG向行动模式PR的转变。另外,允许行动模式PX(不清楚状态)与其他行动模式之间的转变。
规则信息RUL被预先制作,并保存于预定的存储装置(存储装置160、260、300、400中的至少一方)。行动模式设定部20从预定的存储装置取得规则信息RUL。
当由信号状态信息SST所示的点亮状态变化时,根据对应模式信息PAT得到的行动模式也发生转变。根据本实施方式,行动模式设定部20通过将由规则信息RUL所示的规则施加于行动模式的转变,从而修正行动模式的转变,并据此最终地设定行动模式。换言之,行动模式设定部20通过修正行动模式的转变以使得与由规则信息RUL所示的规则匹配,从而最终地设定行动模式。
图23是表示本实施方式涉及的信号解释系统10的处理的流程图。步骤S100以及步骤S200如已在图17中所述的那样。在步骤S100中,行动模式设定部20取得最新的信号状态信息SST。在步骤S200中,行动模式设定部20参照对应模式信息PAT,取得与由信号状态信息SST所示的点亮状态相关联的行动模式作为暂定行动模式。步骤S300(行动模式修正处理)包括如下处理。
在步骤S310中,行动模式设定部20判定暂定行动模式是否是从上次的行动模式转变成的不同的模式。典型地,当信号机SG的点亮状态变化时,暂定行动模式从上次的行动模式转变为不同的模式。在暂定行动模式是从上次的行动模式转变成的不同的模式的情况下(步骤S310:是),处理前进至步骤S320。除此以外的情况下(步骤S310:否),处理前进至步骤S340。
在步骤S320中,行动模式设定部20判定从上次的行动模式向暂定行动模式的转变是否违反由规则信息RUL所示的规则。在从上次的行动模式向暂定行动模式的转变遵守规则的情况下(步骤S320:否),处理前进至步骤S340。另一方面,在从上次的行动模式向暂定行动模式的转变违反规则的情况下(步骤S320:是),处理前进至步骤S330。
在步骤S330中,行动模式设定部20拒绝从上次的行动模式向暂定行动模式的转变,从而维持上次的行动模式作为本次的行动模式。之后,处理前进至步骤S340。
在步骤S340中,行动模式设定部20最终地设定本次的行动模式。也即是说,在暂定行动模式没有从上次的行动模式转变成不同的模式的情况下(步骤S310:否),将暂定行动模式设定为本次的行动模式。在从上次的行动模式向暂定行动模式的转变遵守规则的情况下(步骤S320:否),将暂定行动模式设定为本次的行动模式。在从上次的行动模式向暂定行动模式的转变违反规则的情况下(步骤S320:是),维持上次的行动模式不变作为本次的行动模式。
2-2.应用例
以下,说明本实施方式涉及的信号解释系统10的应用例。
2-2-1.第1应用例
图24~图26是用于对第1应用例进行说明的概念图。
图24表示了信号机SG的点亮状态的重复模式的例子。信号机SG的点亮状态以LG(绿灯信号)、LY(黄灯信号)、LR(红灯信号)、LA1(红灯信号+右箭头信号)、LY(黄灯信号)、LR(红灯信号)的顺序反复变化。在定时T1、T2、T3、T4、T5、T6的点亮状态分别为LG、LY、LR、LA1、LY、LR。
定时T2和定时T5的点亮状态均为点亮状态LY(黄灯信号)。然而,两个点亮状态LY的“前后关系”不同。定时T2的点亮状态LY是继点亮状态LG(绿灯信号)之后的状态。另一方面,定时T5的点亮状态LY是继点亮状态LA1(红灯信号+右箭头信号)之后的状态。由此,在定时T2和定时T5,适当的行动模式应该不同。
图25表示了在定时T4的行动模式和在定时T5的暂定行动模式。针对在定时T4的点亮状态LA1,右转方向的车辆1的行动模式为行动模式PG,直行方向以及左转方向的车辆1的行动模式为行动模式PR(参照图7)。针对在定时T5的点亮状态LY,各方向的车辆1的暂定行动模式为行动模式PY(参照图5)。
然而,在点亮状态LA1之后直行方向以及左转方向的车辆1的行动模式从行动模式PR直接返回到行动模式PY并不适当。于是,修正从定时T4的行动模式向定时T5的暂定行动模式的转变以使得与图22中所示的规则匹配。
图26表示了修正后的行动模式。从行动模式PR向行动模式PY的转变因违反规则而被拒绝。其结果,针对在定时T5的点亮状态LY,直行方向以及左转方向的车辆1的行动模式也维持转变前的行动模式PR不变。另一方面,由于从行动模式PG向行动模式PY的转变遵守规则,因此右转方向的车辆1的行动模式被更新为行动模式PY。这样得到的修正后的行动模式是与信号机SG的点亮状态的前后关系相匹配的适当的行动模式。
2-2-2.第2应用例
图27~图29是用于对第2应用例进行说明的概念图。
图27表示了信号机SG的点亮状态的重复模式的例子。信号机SG的点亮状态以LG(绿灯信号)、LYA(黄灯信号+全部方向箭头信号)、LRA(红灯信号+全部方向箭头信号)、LY(黄灯信号)、LR(红灯信号)的顺序反复变化。在定时T1、T2、T3、T4、T5的点亮状态分别为LG、LYA、LRA、LY、LR。此外,点亮状态LYA、LRA是为了使对于对向车道的黄灯信号以及红灯信号产生时差所使用的状态。
图28表示了在定时T3的行动模式和在定时T4的暂定行动模式。针对在定时T3的点亮状态LRA,车辆1的行动模式为行动模式PG,对向车辆2的行动模式为行动模式PR。也即是说,允许车辆1进入对象区域TA,但不允许对向车辆2进入对象区域TA。针对在定时T4的点亮状态LY,车辆1的暂定行动模式为行动模式PY,对向车辆2的暂定行动模式为行动模式PY(参照图5)。
然而,在点亮状态LRA之后对向车辆2的行动模式从行动模式PR直接返回到行动模式PY并不适当。于是,修正从定时T3的行动模式向定时T4的暂定行动模式的转变以使得与图22中所示的规则匹配。
图29表示了修正后的行动模式。从行动模式PR向行动模式PY的转变因违反规则而被拒绝。其结果,针对在定时T4的点亮状态LY,对向车辆2的行动模式也维持行动模式PR不变。另一方面,由于从行动模式PG向行动模式PY的转变遵守规则,因此车辆1的行动模式被更新为行动模式PY。这样得到的修正后的行动模式是与信号机SG的点亮状态的前后关系相匹配的适当的行动模式。
将本实施方式中的规则信息RUL以及行动模式设定处理概括如下。信号机SG的点亮状态包括第1点亮状态和第2点亮状态。在对应模式信息PAT中与第1点亮状态相关联的行动模式包括第1行动模式。在对应模式信息PAT中与第2点亮状态相关联的行动模式包括第2行动模式。由规则信息RUL所示的规则包括禁止从第1行动模式向第2行动模式的转变。在点亮状态从第1点亮状态变化为第2点亮状态的情况下,行动模式设定部20拒绝从第1行动模式向第2行动模式的转变而维持第1行动模式。
2-3.效果
如上所述,根据本实施方式,修正信息CRC包含表示允许或禁止行动模式的转变的规则的规则信息RUL。信号解释系统10通过修正从上次的行动模式向暂定行动模式的转变以使得与由规则信息RUL所示的规则匹配,从而设定本次的行动模式。由此,能够更适当地设定相对于对象区域TA的行动模式。
更详细而言,在从上次的行动模式向暂定行动模式的转变遵守规则的情况下,将暂定行动模式设定为本次的行动模式。另一方面,在从上次的行动模式向暂定行动模式的转变违反规则的情况下,拒绝该转变,维持上次的行动模式作为本次的行动模式。由于违反规则的行动模式的转变被拒绝,因而能够更适当地设定行动模式。
有可能产生将信号机SG的点亮状态误识别的情况。在该情况下,由信号状态信息SST所示的点亮状态不正确。在由信号状态信息SST所示的点亮状态不正确时,行动模式也会错误地转变。然而,行动模式的错误的转变违反规则的可能性高,因此可期待其被拒绝。即,即使在产生了信号机SG的点亮状态的误识别的情况下,也能抑制该误识别对行动模式造成影响。
优选为预先将由规则信息RUL所示的规则设定为使行动模式的转变与信号机SG的点亮状态的前后关系相匹配。由此,能够设定与信号机SG的点亮状态的前后关系匹配的适当的行动模式。
另外,根据本实施方式,不一定需要按每个信号机SG预先存储点亮状态的重复模式。如上述应用例中所示,通过将对应模式信息PAT与规则信息RUL组合,能够应对点亮状态的各种重复模式。为了制作按每个信号机SG表示点亮状态的重复模式的数据库,需要巨大的劳力的成本,而根据本实施方式,能削减这种劳力和成本。
3.第3实施方式
第3实施方式是第2实施方式的变形例。信号机SG的点亮状态的误识别可能由于频闪(flicker)和/或疑似点亮而产生。但是,有时点亮状态的误识别会在短时间内结束并立即恢复到正常识别。第3实施方式提供对于这种短时间的误识别也能够灵活应对的规则信息RUL。将会适当省略与已出现的实施方式重复的说明。
3-1.规则信息
图30是用于对本实施方式涉及的规则信息RUL的一例进行说明的概念图。与第2实施方式的情况(参照图22)同样地,基本而言,允许从行动模式PG向行动模式PY的转变,禁止从行动模式PY向行动模式PG的转变。
但是,根据本实施方式,设定临时允许从行动模式PY向行动模式PG的转变的“临时允许时间tp”。更详细而言,在从行动模式PG向行动模式PY转变后到临时允许时间tp经过时为止,允许从行动模式PY向行动模式PG的转变(复原)。在从行动模式PG向行动模式PY转变后经过了临时允许时间tp时,禁止从行动模式PY向行动模式PG的转变。
从另一观点来说明,行动模式PY包含有能够向行动模式PG复原的预备行动模式PYp。在发生了从行动模式PG向行动模式PY的转变的情况下,行动模式首先被设定为预备行动模式PYp。在临时允许时间tp内,允许从预备行动模式PYp向行动模式PG的转变(复原)。在经过了临时允许时间tp时,行动模式成为行动模式PY,被禁止向行动模式PG转变。
对于行动模式PR,也同样地设定临时允许时间tp和预备行动模式PRp。对于行动模式PG,也同样地设定临时允许时间tp和预备行动模式PGp。
此外,临时允许时间tp远远短于相同点亮状态所持续的持续时间。
3-2.应用例
图31是用于对本实施方式涉及的信号解释系统10的应用例进行说明的概念图。在定时T1的信号机SG的点亮状态为点亮状态LG(绿灯信号)。在之后的定时T2,点亮状态被误识别为点亮状态LY(黄灯信号)。但是,误识别的持续时间短于临时允许时间tp。在定时T3,点亮状态回到点亮状态LG(绿灯信号)。在定时T4,点亮状态成为点亮状态LY(黄灯信号)。
在定时T2和定时T4的点亮状态均为点亮状态LY(黄灯信号)。然而,两个点亮状态LY的“前后关系”不同。与定时T4的点亮状态LY是正常的状态相对地,在定时T2的点亮状态LY是由短时间的误识别而成的状态。为了灵活应对这种短时间的误识别,应用图30中所示的规则信息RUL。
应用图30中所示的规则信息RUL的情况下的行动模式如下。相对于定时T1的点亮状态LG的行动模式为行动模式PG。相对于定时T2的点亮状态LY的行动模式为预备行动模式PYp。相对于定时T3的点亮状态LG的行动模式为行动模式PG。要注意,根据图30中所示的规则信息RUL,允许从预备行动模式PYp向行动模式PG的转变。
作为比较例,考虑应用图22中所示的规则信息RUL的情况。在该比较例的情况下,不存在预备行动模式PYp,从行动模式PY向行动模式PG的转变一律被禁止。因此,相对于定时T3的点亮状态LG的行动模式维持行动模式PY不变。即,尽管点亮状态为点亮状态LG(绿灯信号),但行动模式却成为与黄灯信号对应的行动模式PY。这是不适当的。另一方面,根据本实施方式,行动模式成为与绿灯信号对应的适当的行动模式PG。
将本实施方式中的规则信息RUL以及行动模式设定处理概括如下。信号机SG的点亮状态包括第3点亮状态和第4点亮状态。在对应模式信息PAT中与第3点亮状态相关联的行动模式包括第3行动模式。在对应模式信息PAT中与第4点亮状态相关联的行动模式包括第4行动模式。由规则信息RUL所示的规则包括:允许从第3行动模式向第4行动模式的转变,在临时允许时间tp内允许从第4行动模式向第3行动模式的转变,在临时允许时间tp经过后禁止从第4行动模式向第3行动模式的转变。在点亮状态从第3点亮状态变化为第4点亮状态的情况下,行动模式设定部20执行从第3行动模式向第4行动模式的转变。在点亮状态从第3点亮状态变化为第4点亮状态后到临时允许时间tp经过时为止,点亮状态从第4点亮状态直接返回到第3点亮状态的情况下,行动模式设定部20执行从第4行动模式向第3行动模式的转变。在点亮状态从第3点亮状态变化为第4点亮状态并进而经过了临时允许时间tp后,点亮状态从第4点亮状态直接返回到第3点亮状态的情况下,行动模式设定部20拒绝从第4行动模式向第3行动模式的转变而维持第4行动模式。
3-3.效果
根据本实施方式,设定临时允许基本而言被禁止的行动模式转变的临时允许时间tp。由此,即使在短时间发生了信号机SG的点亮状态的误识别的情况下,也能够适当地设定行动模式。在本实施方式中,可以说是考虑到了短时间的误识别这一前后关系来设定适当的行动模式。
4.第4实施方式
第4实施方式是第2实施方式的变形例。有时信号机SG的点亮状态会在短时间内变为不清楚的点亮状态LX并在之后立即恢复为正常。第4实施方式提供在这种情况下也能够灵活应对的规则信息RUL。将会适当省略与已出现的实施方式重复的说明。
4-1.规则信息
图32是用于对本实施方式涉及的规则信息RUL的一例进行说明的概念图。根据本实施方式,关于向与不清楚的点亮状态LX相关联的行动模式PX(参照图13)的转变,设定有“无反应时间tn”。在无反应时间tn内,行动模式无需转变为行动模式PX而维持原行动模式。即,在信号机SG的点亮状态变化为不清楚的点亮状态LX后到无反应时间tn经过时为止,禁止行动模式转变为行动模式PX。在信号机SG的点亮状态变化为不清楚的点亮状态LX后经过了无反应时间tn时,行动模式转变为行动模式PX。
此外,无反应时间tn远远短于相同点亮状态所持续的持续时间。
4-2.应用例
图33是用于对本实施方式涉及的信号解释系统10的应用例进行说明的概念图。在定时T1的信号机SG的点亮状态为点亮状态LG(绿灯信号)。在之后的定时T2,点亮状态成为不清楚的点亮状态LX。但是,点亮状态LX的持续时间比无反应时间tn短。在定时T3,点亮状态回到点亮状态LG(绿灯信号)。
在定时T1的行动模式为行动模式PG。与在定时T2的点亮状态LX相关联的暂定行动模式为行动模式PX。然而,按照图32中所示的规则信息RUL,在无反应时间tn内,禁止从行动模式PG向暂定行动模式PX的转变。其结果,行动模式不会转变为行动模式PX,而维持原行动模式PG不变。
将本实施方式中的规则信息RUL以及行动模式设定处理概括如下。信号机SG的点亮状态包括第5点亮状态和意味着不清楚的第6点亮状态(点亮状态LX)。在对应模式信息PAT中与第5点亮状态相关联的行动模式包括第5行动模式。在对应模式信息PAT中与第6点亮状态相关联的行动模式包括第6行动模式。由规则信息RUL所示的规则包括在无反应时间tn内禁止从第5行动模式向第6行动模式的转变。在点亮状态从第5点亮状态变化为第6点亮状态后到无反应时间tn经过时为止,行动模式设定部20拒绝从第5行动模式向第6行动模式的转变而维持第5行动模式。在点亮状态从第5点亮状态变化为第6点亮状态后经过了无反应时间tn时,行动模式设定部20执行从第5行动模式向第6行动模式的转变。
4-3.效果
根据本实施方式,在信号机SG的点亮状态变化为不清楚的点亮状态LX后到无反应时间tn经过时为止,禁止行动模式转变为行动模式PX。由此,能够防止短时间的不清楚的点亮状态LX对行动模式造成影响,使行动模式稳定。
此外,第4实施方式可以与上述的第2、第3实施方式中的任一方组合。
5.第5实施方式
图34是表示第5实施方式涉及的信号解释系统10的功能构成例的框图。将会适当省略与已出现的实施方式重复的说明。信号机SG具有的点亮状态的种类可能根据信号机SG的种类而不同。由此,按信号机SG的每个种类准备不同的规则信息RUL(RUL1、RUL2……)。
图35是表示与设置于道口的信号机SG(参照图14、图15)有关的规则信息RUL的一例的概念图。如图14中所示,与点亮状态LC1相关联的行动模式为行动模式PR。如图15中所示,与点亮状态LC2相关联的行动模式为行动模式PST。规则信息RUL供给与行动模式PR、行动模式PST以及行动模式PX之间的转变有关的规则。在由信号状态信息SST所示的点亮状态为点亮状态LC1或者点亮状态LC2的情况下,行动模式设定部20选择并使用图35中所示的规则信息RUL。
图36~图38是用于对规则信息RUL的另一例进行说明的概念图。
图36表示了信号机SG的点亮状态的重复模式的例子。与已说明的图24中所示的例子相比,省略了点亮状态LY(黄灯信号)与点亮状态LA1(红灯信号+右箭头信号)之间的点亮状态LR(红灯信号)。即,信号机SG的点亮状态不经由点亮状态LR而从点亮状态LY直接变化为点亮状态LA1。
图37表示了伴随着从点亮状态LY向点亮状态LA1的变化的行动模式的转变。右转方向的车辆1的行动模式从行动模式PY向行动模式PG转变,而这是适当的转变。因此,在点亮状态从点亮状态LY直接变化为点亮状态LA1的情况下,期望例外地允许从行动模式PY向行动模式PG的转变。
图38表示了根据以上的观点所生成的规则信息RUL。基本而言,从行动模式PY向行动模式PG的转变是被禁止的。但是,仅限在点亮状态从点亮状态LY直接变化为点亮状态LA1的情况下,允许从行动模式PY向行动模式PG的转变。在由信号状态信息SST所示的点亮状态从点亮状态LY直接变化为点亮状态LA1的情况下,行动模式设定部20选择并使用图38中所示的规则信息RUL。
也可以预先准备将绝对坐标系中的信号机SG的位置与规则信息RUL相关联的规则信息数据库。基于摄像头拍摄信息IMG来检测的信号机SG在绝对坐标系中的位置能够根据位置信息POS和摄像头拍摄信息IMG算出。信号状态信息SST也包含所检测出的信号机SG在绝对坐标系中的位置。行动模式设定部20参照规则信息数据库,选择与由信号状态信息SST所示的位置相关联的规则信息RUL。
6.第6实施方式
6-1.概要
图39是表示第6实施方式涉及的信号解释系统10的功能构成例的框图。将会适当省略与第1实施方式重复的说明。本实施方式涉及的信号解释系统10还具备周边车辆分析部30。周边车辆分析部30是处理器150(参照图18)或者处理器250(参照图20)的功能块。
周边车辆分析部30基于驾驶环境信息ENV,分析车辆1周围的周边车辆的状态,生成表示分析结果的周边车辆信息SUV。例如,周边车辆信息SUV表示绝对坐标系中的周边车辆的位置、速度以及加速度。再者,周边车辆信息SUV表示相对于对象区域TA的周边车辆的车辆行为。作为相对于对象区域TA的周边车辆的车辆行为,例如有“停止/预定停止”、“开始行进/行进”以及“不清楚”。
更详细而言,驾驶环境信息ENV包含位置信息POS、周边状况信息SIT以及车辆状态信息STA(参照图19)。位置信息POS表示绝对坐标系中的车辆1的位置以及朝向。周边状况信息SIT包含相对于车辆1的周边车辆的相对位置以及相对速度。车辆状态信息STA包含车辆1的速度。由此,基于驾驶环境信息ENV,能够算出绝对坐标系中的周边车辆的位置、速度、加速度等。
进而,基于周边车辆的位置、速度、加速度,能够判定该周边车辆的车辆行为。例如,在某一周边车辆的位置位于停止线的跟前、其速度低于第1速度阈值并且其加速度为零以下的情况下,将该周边车辆的车辆行为判定为“停止/预定停止”。停止线的位置能根据地图信息MAP或者周边状况信息SIT获得。第1速度阈值也可以是从周边车辆到停止线的距离的函数。在某个周边车辆的速度为第2速度阈值以上并且其加速度为零以上的情况下,将该周边车辆的车辆行为判定为“开始行进/行进”。第2速度阈值也可以是周边车辆与停止线之间的距离的函数。在除此以外的情况下,将周边车辆的车辆行为判定为“不清楚”。
根据本实施方式,修正信息CRC包含周边车辆信息SUV。行动模式设定部20通过基于周边车辆信息SUV来修正暂定行动模式,最终地设定相对于对象区域TA的行动模式。更详细而言,行动模式设定部20修正暂定行动模式以使得与周边车辆的车辆行为匹配。由此,能够更适当地设定相对于对象区域TA的行动模式。
图40是表示本实施方式涉及的信号解释系统10的处理的流程图。
在步骤S100A中,行动模式设定部20取得最新的信号状态信息SST。另外,周边车辆分析部30取得最新的周边车辆信息SUV。步骤S200与第1实施方式的情况相同。
步骤S300(行动模式修正处理)包括步骤S350。在步骤S350中,行动模式设定部20修正暂定行动模式以使得与周边车辆的车辆行为匹配,由此,最终地设定相对于对象区域TA的行动模式。
6-2.应用例
以下,说明本实施方式涉及的信号解释系统10的应用例。
6-2-1.第1应用例
图41是用于对第1应用例进行说明的概念图。对象区域TA为交叉路口。考虑设置于该交叉路口的信号机SG的点亮状态刚刚从点亮状态LR(红灯信号)变化为点亮状态LG(绿灯信号)之后的状况。在该状况下,沿交叉方向行进的交叉车辆4还留在交叉路口内。在该情况下,从安全的观点来看,不希望车辆1马上进入交叉路口内。也即是说,仅基于信号机SG的点亮状态来设定车辆1的行动模式不一定都适当。
于是,基于周边车辆信息SUV来进行车辆1的行动模式的修正。具体而言,在对应模式信息PAT中与点亮状态LG相关联的车辆1的暂定行动模式为行动模式PG。另一方面,周边车辆信息SUV表示了交叉路口内存在有沿交叉方向行进的交叉车辆4。与该交叉车辆4的车辆行为匹配的点亮状态为点亮状态LR(红灯信号)。由此,车辆1的行动模式也设定为行动模式PR以使得与交叉车辆4的车辆行为匹配。这样,能设定更适当的行动模式。
6-2-2.第2应用例
图42是用于对第2应用例进行说明的概念图。对象区域TA为交叉路口。由信号状态信息SST所示的信号机SG的点亮状态为不清楚的点亮状态LX。另一方面,对向车道的对向车辆5开始向交叉路口行进、或者正在交叉路口中行进。这意味着相对于对向车道的信号机(未图示)的点亮状态为点亮状态LG(绿灯信号)。由此,推定为信号机SG的点亮状态也同样是点亮状态LG(绿灯信号)。
于是,基于周边车辆信息SUV来进行车辆1的行动模式的修正。具体而言,在对应模式信息PAT中与点亮状态LX相关联的车辆1的暂定行动模式为行动模式PX。另一方面,周边车辆信息SUV表示了对向车辆5开始向交叉路口行进、或者正在交叉路口中行进。与该对向车辆5的车辆行为匹配的点亮状态为点亮状态LG(绿灯信号)。由此,车辆1的行动模式也设定为行动模式PG以使得与对向车辆5的车辆行为匹配。这样,能设定更适当的行动模式。
6-2-3.第3应用例
图43是用于对第3应用例进行说明的概念图。对象区域TA为交叉路口。由信号状态信息SST所示的信号机SG的点亮状态为不清楚的点亮状态LX。另一方面,与车辆1位于相同车道的相邻车辆6停止在停止线之前。由此,推定为信号机SG的点亮状态是点亮状态LR(红灯信号)。
于是,基于周边车辆信息SUV来进行车辆1的行动模式的修正。具体而言,在对应模式信息PAT中与点亮状态LX相关联的车辆1的暂定行动模式为行动模式PX。另一方面,周边车辆信息SUV表示了相邻车辆6停止在停止线之前。与该相邻车辆6的车辆行为匹配的点亮状态为点亮状态LR(红灯信号)。由此,车辆1的行动模式也设定为行动模式PR以使得与相邻车辆6的车辆行为匹配。这样,能设定更适当的行动模式。
6-2-4.第4应用例
图44是用于对第4应用例进行说明的概念图。对象区域TA为设置有时差式信号的交叉路口。时差式信号例如能够通过利用信号机地图信息来掌握。信号机地图信息将信号机SG的“绝对坐标系中的位置”与“种类”相关联地表示。基于摄像头拍摄信息IMG检测的信号机SG的绝对坐标系中的位置能够根据位置信息POS和摄像头拍摄信息IMG来算出。而且,通过参照信号机地图信息,能够掌握该信号机SG的种类(时差式信号)。
由信号状态信息SST所示的信号机SG的点亮状态为点亮状态LG(绿灯信号)。另一方面,存在于对向车道的对向车辆2停止在停止线之前。由此,推定为相对于对向车道的信号机(未图示)的点亮状态是点亮状态LR(红灯信号)。
于是,基于周边车辆信息SUV来进行对向车辆2的行动模式的修正。具体而言,在对应模式信息PAT中与点亮状态LG相关联的对向车辆2的暂定行动模式为行动模式PG。另一方面,周边车辆信息SUV表示了对向车辆2停止在停止线之前。与该对向车辆2的车辆行为匹配的点亮状态为点亮状态LR(红灯信号)。由此,对向车辆2的行动模式被设定为行动模式PR以使得与对向车辆2的车辆行为匹配。这样,能设定更适当的行动模式。
6-2-5.第5应用例
图45是用于对第5应用例进行说明的概念图。对象区域TA为交叉路口。考虑设置于该交叉路口的所有信号机由于停电或者故障而处于非点亮状态的状况。由信号状态信息SST所示的信号机SG的点亮状态为不清楚的点亮状态LX。在该状况下,对向车辆2和交叉车辆3中的至少一方停止在停止线之前。在该情况下,认为车辆1可以在暂停后小心地前行。
于是,基于周边车辆信息SUV来进行车辆1的行动模式的修正。具体而言,在对应模式信息PAT中与点亮状态LX相关联的车辆1的暂定行动模式为行动模式PX。周边车辆信息SUV表示了对向车辆2和交叉车辆3中的至少一方停止在停止线之前。车辆1的行动模式被设定为行动模式PST以使得与对向车辆2和交叉车辆3中的至少一方的车辆行为匹配。这样,能设定更适当的行动模式。
6-3.效果
如上所述,根据本实施方式,修正信息CRC包含表示周边车辆相对于对象区域TA的车辆行为的周边车辆信息SUV。信号解释系统10通过修正暂定行动模式以使得与周边车辆的车辆行为匹配,从而设定行动模式。由此,能够更适当地设定相对于对象区域TA的行动模式。
7.第7实施方式
也可以将第6实施方式与其他实施方式组合。也即是说,修正信息CRC也可以包含规则信息RUL和周边车辆信息SUV双方。
- 信号解释系统以及车辆控制系统
- 交通信号灯控制系统、车辆、交通信号灯控制装置及方法