基于图像处理的铁路货车车轮破损检测方法
文献发布时间:2023-06-19 09:49:27
技术领域
本发明涉及图像处理技术领域,具体为基于图像处理的铁路货车车轮破损检测方法。
背景技术
目前动车组故障检测,一般采用人工排查的方式进行故障检修。由检测作业受作业人员的业务素质、责任心、劳动强度等因素影响较大,容易发生漏检或简化作业等情况。人工检测工作效率和准确率低,一旦出现作业质量问题,不利于查找作业过程中产生问题的原因和问题发生的时间。
通过3D相机的高度图像进行定位,选取整个车轮故障的识别范围。通过线阵相机的灰度图进行故障的判定识别。沿着车轮椭圆方向计算梯度特征判断在车轮上是否存在故障。
发明内容
本发明的目的是:针对现有技术中人工检测铁路货车车轮破损故障效率和准确率低的问题,提出基于图像处理的铁路货车车轮破损检测方法。
本发明为了解决上述技术问题采取的技术方案是:
基于图像处理的铁路货车车轮破损检测方法,包括以下步骤:
步骤一:获取待检测图像的3D图像及铁路货车车轮线阵图像,3D图像包括3D灰度图和3D高度图;
步骤二:以3D灰度图为模板对铁路货车车轮线阵图像做直方图规定化处理,得到规定化图像;
步骤三:提取规定化图像及3D灰度图的ORB特征;
步骤四:将规定化图像及3D灰度图的ORB特征进行匹配,得到变化矩阵;
步骤五:对3D高度图中的像素点进行调整,使调整后3D高度图中的轮辋高度值位于目标范围内;
步骤六:将调整后的3D高度图根据变换矩阵进行投影变换,得到投影变换后的3D高度图;
步骤七:获取投影变换后的3D高度图中轮辋高度值处于目标范围内的像素点,并将该范围内的像素点的灰度值设置为255,不在该范围内的像素点灰度值置为0,得到二值图;
步骤八:在二值图中,以车轮中心点为中心进行极坐标搜索,从中心点外围向内遍历,当遍历到的像素点由黑色转为白色时,则该像素点即为车轮外圈的像素点,当像素点由白色转为黑色时,该像素点即为内圈像素点;
步骤九:收集所有的内圈像素点和外圈像素点,并确定内圈像素点和外圈像素点的中心点,利用内圈像素点和外圈像素点的中心点使用最小二乘法拟合椭圆,根据得到的椭圆向内外同时扩展,扩展后的区域即为车轮检测区域;
步骤十:在车轮检测区域内,使用sobel算子获取原始铁路货车车轮线阵图像上对应的车轮检测区域内各像素点的梯度大小和方向,并根据原始铁路货车车轮线阵图像上对应的车轮检测区域内各像素点的梯度大小和方向得到车轮检测区域内各像素点的椭圆切线方向,然后循环遍历车轮检测区域范围内的像素点,当该像素点的梯度大小在梯度阈值内,同时该像素点的梯度方向与切线方向差值在方向差阈值内时,则认为该像素点为破损点,遍历结束后,根据获得的破损点集得到连通区域,即为故障区域;否则认为该像素点为未破损点,遍历结束后,根据获得的未破损点集得到连通区域,即为非故障区域。
进一步的,检测方法还包括检验步骤,检验步骤具体为:
步骤A:将待检测图像输入训练好的SVM中判定待检测图像中是否含有故障区域子图;
步骤B:若步骤十得到的结果为故障区域,且步骤C得到故障区域子图,则最终判定为故障,否则为非故障。
进一步的,训练好的SVM通过以下步骤训练:
步骤A1:截取样本铁路货车车轮线阵图像中的故障区域子图和非故障区域子图;
步骤A2:提取故障区域子图和非故障区域子图的LBP特征,并根据所提取的LBP特征对初始SVM进行训练,获得训练好的SVM。
进一步的,步骤A1的具体步骤为:
对于没有故障的图像以车轮中心为极坐标中心,每隔15度截取一段图像,即为非故障区域子图;
对于存在故障的图像,以车轮中心为极坐标中心,极坐标故障范围小于15度的,直接截取15度范围内的图像作为故障区域子图,大于15度的,分成两段,分别获取两个15度范围的截图,然后将两个15度范围的截图拼合在一起作为故障区域子图。
进一步的,步骤五通过如下公式进行调整:
g=g
其中,g
进一步的,步骤九中椭圆向内外同时扩展的范围为1±δ,其中δ为椭圆浮动阈值。
进一步的,1±δ范围表示为:
其中x
进一步的,椭圆切线方向表示为:
其中x
进一步的,步骤十中连通区域通过膨胀处理得到。
进一步的,步骤七中轮辋高度值处于30000灰度值到33000灰度值之间。
本发明的有益效果是:
1、利用图像自动识别的方式代替人工检测,提高故障识别检测效率、准确率,降低人力成本。
2、通过3D相机识别检测范围,效率更高更准确,通过灰度图像判定故障能够更有效的弥补3D相机不足,避免误检和漏检。
3.先采用常规方式提取可能存在的故障区域,然后进行分类识别,可以有效提高运行效率。
附图说明
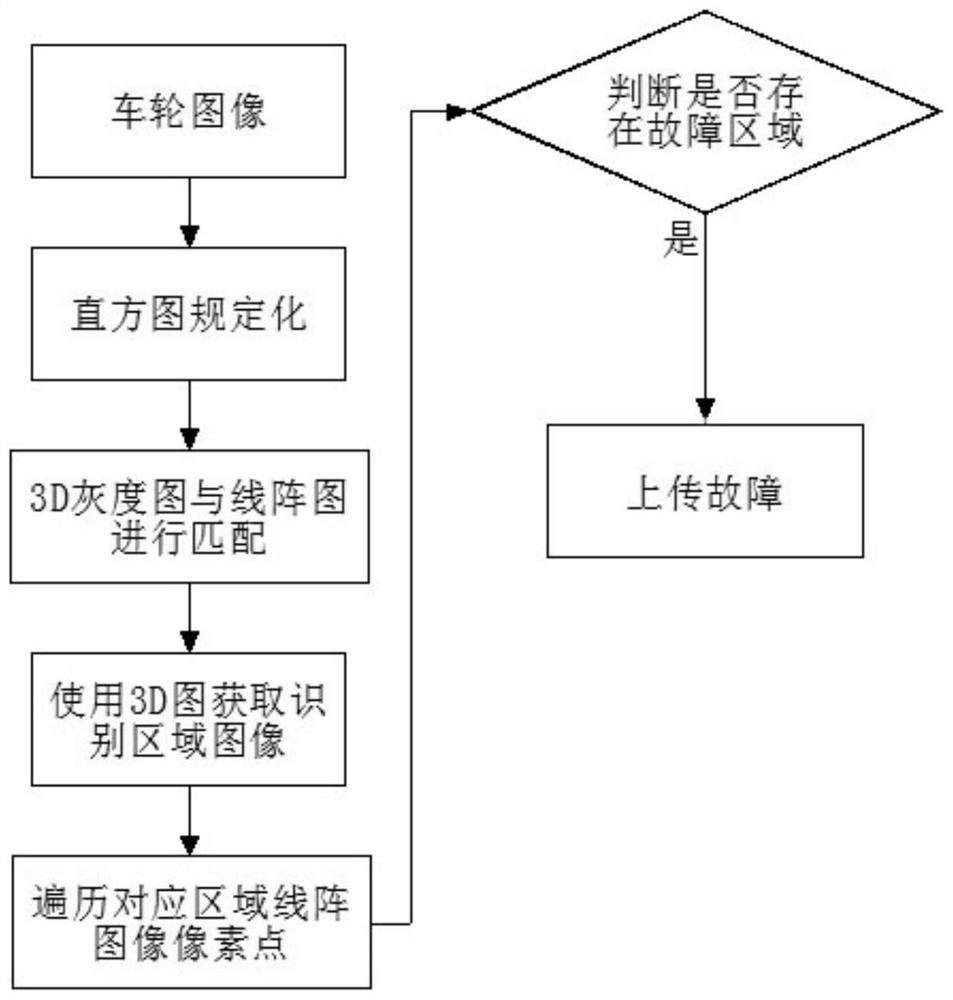
图1为本发明故障判定流程图;
图2为轴箱端盖图示意图;
图3为本发明具体实施方式二的判定流程图。
具体实施方式
需要特别说明的是,在不冲突的情况下,本申请公开的各个实施例之间可以相互组合。
具体实施方式一:参照图1具体说明本实施方式,本实施方式的基于图像处理的铁路货车车轮破损检测方法,包括以下步骤:
步骤一:获取待检测图像的3D图像及铁路货车车轮线阵图像,3D图像包括3D灰度图和3D高度图;
步骤二:以3D灰度图为模板对铁路货车车轮线阵图像做直方图规定化处理,得到规定化图像;
步骤三:提取规定化图像及3D灰度图的ORB特征;
步骤四:将规定化图像及3D灰度图的ORB特征进行匹配,得到变化矩阵;
步骤五:对3D高度图中的像素点进行调整,使调整后3D高度图中的轮辋高度值位于目标范围内;
步骤六:将调整后的3D高度图根据变换矩阵进行投影变换,得到投影变换后的3D高度图;
步骤七:获取投影变换后的3D高度图中轮辋高度值处于目标范围内的像素点,并将该范围内的像素点的灰度值设置为255,不在该范围内的像素点灰度值置为0,得到二值图;
步骤八:在二值图中,以车轮中心点为中心进行极坐标搜索,从中心点外围向内遍历,当遍历到的像素点由黑色转为白色时,则该像素点即为车轮外圈的像素点,当像素点由白色转为黑色时,该像素点即为内圈像素点;
步骤九:收集所有的内圈像素点和外圈像素点,并确定内圈像素点和外圈像素点的中心点,利用内圈像素点和外圈像素点的中心点使用最小二乘法拟合椭圆,根据得到的椭圆向内外同时扩展,扩展后的区域即为车轮检测区域;
步骤十:在车轮检测区域内,使用sobel算子获取原始铁路货车车轮线阵图像上对应的车轮检测区域内各像素点的梯度大小和方向,并根据原始铁路货车车轮线阵图像上对应的车轮检测区域内各像素点的梯度大小和方向得到车轮检测区域内各像素点的椭圆切线方向,然后循环遍历车轮检测区域范围内的像素点,当该像素点的梯度大小在梯度阈值内,同时该像素点的梯度方向与切线方向差值在方向差阈值内时,则认为该像素点为破损点,遍历结束后,根据获得的破损点集得到连通区域,即为故障区域;否则认为该像素点为未破损点,遍历结束后,根据获得的未破损点集得到连通区域,即为非故障区域。
1、车轮检测范围识别
由于车轮表面剥落或者产生裂缝时,在3D相机高度图像中灰度值差异并不明显。在线阵图像中,由于存在较多的干扰定位车轮的检测范围比较困难。因此采用3D图像定位检测范围,线阵图像检测故障的方案。
由于3D图像和线阵图像分别采用不同的相机拍摄。因此,在图像中车轮的位置存在一定的偏差。
在3D相机的灰度图,包涵了图像的灰度信息。相对于线阵图像3D相机的灰度图包涵的信息亮偏少,不利于车轮破损故障的识别。以3D相机的灰度图的灰度图为模板,对线阵图做直方图规定化。提取调整后的图像和3D灰度图的ORB特征,然后进行特征匹配,得到变化矩阵。将3D高度图根据矩阵进行投影变换,使其与线阵图像完全匹配。
在3D相机的高度图中,车轮的灰度值与铁轨的灰度值相当,根据此特性获取图像中指定灰度值范围内的像素点,并将值置为255,其余像素点灰度值置为0。获取二值图即为车轮粗略的检测范围。
当相机固定后,车轮中心距离铁轨的高度大致确定,那么车轮中心点,在图像中的位置可以确定。以二值图纵坐标最大值点横坐标为车轮中心横坐标。在二值图中,以此点为中心进行极坐标搜索。每隔一定角度从中心点外围向内遍历,当遍历到的像素点值有黑色转为白色时,即为车轮外圈的像素点,当像素点有白色转为黑色时,即为内圈像素点。收集到内外圈像素点两个点的中心点,利用这些点使用最小二乘法拟合椭圆。在该椭圆向内外同时扩展一定区域,该区域即为车轮检测区域。
2、获取故障区域位置
在图像中车轮由于自身特性及光照的影响经常出现图中现象,内圈与外圈亮暗差距明显。为了消除这种影响,要求故障点位置的梯度方向主要沿着当前故障点所在椭圆的切线方向。导数方程如下:
其中x
循环遍历1±δ范围内椭圆上的点,使用sobel算子获取线阵图上对应椭圆点的梯度大小和方向。已知椭圆方程求导得出该点的椭圆切线方向。当梯度大小在阈值内,同时梯度方向与切线方向差值在阈值内,认为该点为破损形成的点。遍历结束后,获得的点集即为故障区域。
3、识别故障
在线阵图像中截取故障区域,截图为包涵故障区域的部分椭圆圆环。为了简化后续分离识别过程,统一将截取的图像旋转至圆环法线向上的方向。得到故障区域后,为了减少由于光照变化,下雨等环境因素产生的误报,进一步采用机器学习的方式进行分类识别。
为了减少误报,提取故障区域子图和非故障区域子图的LBP特征,使用SVM训练。在识别过程中,将上面获取的故障区域子图,提取LBP特征,使用SVM进行识别判断。先采用常规方式提取可能存在的故障区域,然后进行分类识别。如果将椭圆形故障区域直接分段截取子图,旋转后使用SVM分类,这样需要分类的图像数量大大增加,降低运行效率。
具体实施方式二:本实施方式是对具体实施方式一的进一步说明,本实施方式与具体实施方式一的区别是检测方法还包括检验步骤,检验步骤具体为:
步骤A:截取铁路货车车轮线阵图像中故障区域子图和非故障区域子图;
步骤B:提取故障区域子图和非故障区域子图的LBP特征,并根据LBP特征训练SVM。如图3所示。
具体实施方式三:本实施方式是对具体实施方式二的进一步说明,本实施方式与具体实施方式二的区别是训练好的SVM通过以下步骤训练:
步骤A1:截取样本铁路货车车轮线阵图像中的故障区域子图和非故障区域子图;
步骤A2:提取故障区域子图和非故障区域子图的LBP特征,并根据所提取的LBP特征对初始SVM进行训练,获得训练好的SVM。
具体实施方式四:本实施方式是对具体实施方式三的进一步说明,本实施方式与具体实施方式三的区别是步骤A的具体步骤为:
对于没有故障的图像以车轮中心为极坐标中心,每隔15度截取一段图像,即为非故障区域子图;
对于存在故障的图像,以车轮中心为极坐标中心,极坐标故障范围小于15度的,直接截取15度范围内的图像作为故障区域子图,大于15度的,分成两段,分别获取两个15度范围的截图,然后将两个15度范围的截图拼合在一起作为故障区域子图。
在现有技术中,若破损范围大于30度,则已发生事故,不需要进行检测。
具体实施方式五:本实施方式是对具体实施方式一的进一步说明,本实施方式与具体实施方式一的区别是步骤五通过如下公式进行调整:
g=g
其中,g
具体实施方式六:本实施方式是对具体实施方式一的进一步说明,本实施方式与具体实施方式一的区别是步骤九中椭圆向内外同时扩展的范围为1±δ,其中δ为椭圆浮动阈值。
具体实施方式七:本实施方式是对具体实施方式六的进一步说明,本实施方式与具体实施方式六的区别是1±δ范围表示为:
其中x
具体实施方式八:本实施方式是对具体实施方式一的进一步说明,本实施方式与具体实施方式一的区别是椭圆切线方向表示为:
其中x
具体实施方式九:本实施方式是对具体实施方式一的进一步说明,本实施方式与具体实施方式一的区别是步骤十中连通区域通过膨胀处理得到。
具体实施方式十:本实施方式是对具体实施方式一的进一步说明,本实施方式与具体实施方式一的区别是步骤七中轮辋高度值处于30000灰度值到33000灰度值之间。
需要注意的是,具体实施方式仅仅是对本发明技术方案的解释和说明,不能以此限定权利保护范围。凡根据本发明权利要求书和说明书所做的仅仅是局部改变的,仍应落入本发明的保护范围内。
- 基于图像处理的铁路货车车轮破损检测方法
- 基于图像处理的铁路货车钩舌销故障检测方法