自动驾驶专用车道上故障及事故类型识别和道路救援的方法
文献发布时间:2023-06-19 09:51:02
技术领域
本发明涉及智能交通技术,具体涉及一种自动驾驶专用车道上故障及事故类型识别和道路救援的方法。
背景技术
未来交通系统中将会有越来越多的联网和自动驾驶的车辆。这类由自动驾驶车辆和现在普通的人工驾驶车辆形成的混合车流环境,将带来未来一代的交通系统,即智能网联交通系统。现阶段相关领域的技术研究多集中于单一的车辆或通讯技术,例如自动驾驶技术、V2V技术(车辆与车辆间通信技术)、V2I技术(车辆与路侧设备间通信技术)等。然而,智能网联交通系统是一个涵盖了自动驾驶车辆、交通环境、通信设施设备、交通管理和控制系统等多实体,涉及了智能网联道路技术、车路协同技术、主动管理控制技术、人车路中心协同服务管理技术、自动公路系统等多技术理论,整合交通行业、互联网行业、通信行业、汽车行业等多领域的综合体,具有系统化、自动化和连通性等特征。
当智能网联系统,因不可预知因素出现设备故障及交通事故时,如何整合新兴的传感技术、通信技术、计算技术和控制技术,合理地运用该系统自动驾驶专用道上的车载设备与路侧设施,指导道路应急救援的事故检测与车辆控制,对于实现智能网联系统的可持续发展将具有重要意义。
发明内容
发明目的:本发明的目的在于解决现有技术中存在的不足,提供一种自动驾驶专用车道上故障及事故类型识别和道路救援的方法,应急管理和道路救援方法提供了路由辅助、应急程度智能判断、应急救援流程设计、自动驾驶车辆和事故应急车辆控制等功能。
技术方案:本发明的一种自动驾驶专用车道上故障及事故类型识别和道路救援的方法,对突发故障和事故进行事故识别,并判断事故单元的类型,根据事故单元的类型进行新颖的检测与应急救援,其中事故单元类型包括车载设备故障(OBU故障)、交通事故和路侧设施事故(RSU事故);
(1)当为车载设备故障时
(1.1)根据故障严重程度的不同,将车载设备故障分为轻微、较严重和严重3个等级进行识别;
(1.2)车辆减速与控制,即路段层TCC接收到来自车载设备的事故识别或车辆故障信息后,完成车辆减速控制与缓冲区域计算:
当车载设备出现故障时,按照车载设备故障等级进行差异化控制;若事故轻微,则事发车辆继续行驶在自动车道;若事故较严重,则事发车辆需完成自动/手动模式切换,经软隔离驶出自动车道;若事故严重,则路段层TCC需计算减速缓冲区域,事发车辆需减速停靠等待救援车辆;
(1.3)应急救援与疏散:
按照事故点进行分类,将事故地点划分为普通车道与自动车道2种类型;若车载设备故障发生在普通车道,则应急救援车辆由本向自动车道或其他普通车道到达事故点;若车载设备故障发生在自动车道,则应急救援车辆经由对向自动车道或普通车道到达事故点;
(2)当为路侧设施故障(RSU)时
(2.1)根据事故大小分为损伤较小、一定损伤、损伤较大和无法使用4种情况进行识别;
(2.2)车辆减速与控制,即路段层TCC接收到来自路侧设施的事故识别或车辆故障信息后,完成车辆减速控制与缓冲区域计算:
当路侧设施出现故障时,路段层TCC会按照路侧设备故障等级进行不同的减速方案选择;其中,若事故处于自动驾驶专用道损伤较小或自动驾驶专用道有一定损伤的情况时,自动驾驶专用道上的车辆在事故点顺流方向之前的路段进行适当逐级减速并继续行驶在自动车道;若事故较严重,处于自动驾驶专用道损伤较大的情况时,事发车辆与后方车辆协同减速,事发路段车辆完成自动/手动模式切换,以手动模式驶离该路段后切换回自动驾驶模式;若自动驾驶道路无法使用时,TCC计算减速缓冲区域并控制事发点后方车辆逐级减速,后方车辆完成自动/手动模式切换,经软隔离驶出自动车道;
(2.3)应急救援与疏散:即对于故障设备的应急救援预案则根据事故大小等级执行相应的应急预案与救援方案:由于路侧单元设施处于自动驾驶专用道一侧,因此救援抢修车辆由本向自动车道或其他普通车道到达事故点;到达后进行抢修作业,占用部分道路可通过绕行普通车道,减小交通堵塞;
(3)当事故类型为交通事故时
(3.1)根据交通事故严重程度的不同,将交通事故分为轻微和严重2个等级进行识别;
若事故为轻微时车辆执行减速与控制策略,即路段层TCC接收事故识别信息后,完成车辆减速控制与缓冲区域计算:若事故轻微,则通过事故责任确认后,驶出交通事故现场,即可恢复对专用道的使用,供车辆继续进行自动驾驶;
若事故严重,事故点下游自动车辆由自动模式转换为手动模式按钮,通过普通车道驶离,救援和维护车辆由普通车道或自动车道到达事故点,待事故完全处理后,则恢复对专用道的使用;
(3.2)应急救援与疏散;首先确认事故发生地点,若事故发生在自动车道则应急救援车辆经由对向自动车道或普通车道到达事故点。
进一步的,所述车载OBU是指辅助智能车辆子系统中的车辆单位通过联网安全认证的车载ID单元;
所述分层的交通控制中心TCC和交通控制单元TCU是指:宏观层TCC、地区层TCC、通道层TCC、路段层TCC、路段层TCU、点层TCU;其中每一层的控制中心和控制单元能够处理上层交通控制中心和交通控制单元的交通控制指令信息,并向低层交通控制中心和交通控制单元发送控制指令;
所述路侧设施RSU包括感知模块、数据处理模块、通信模块、展示模块和电源单元,感知模块应用于采集交通和车辆驾驶环境信息,数据处理模块提供特定车辆的状态数据,并通过通讯模块完成车辆与上一层级TCU之间实现信息交互和发送特定的车辆驾驶指令给车辆,展示模块用于展示发送至车载设备的数据。
进一步的,若车载设备OBU发生故障
(1.1)故障及事故识别阶段,通过车载或路侧设备完成事故识别与损伤评估,并将信息指令传递至路段层TCC,其识别过程如图5所示。路段层TCC在接收到故障信息后,利用TCU完成事故车辆定位,并依据事故等级的不同,采用不同的识别方法:
若车载设备所受损伤较轻,没有对车辆在专用道路的正常行驶造成显著影响,仍可通过OBU等对车辆状态检测,这种情况判断为轻微故障;
若车载设备OBU设备受到损伤,但没有丧失车辆在自动车道行驶的感知与控制功能,且车载设备能与路侧单元RSU协同完成事故识别,这种情况为较严重故障;
若车载设备OBU受损严重,显著影响车辆在自动车道的正常行驶,并需完全依靠路侧设施进行事故识别与信息传递,这种情况判断为严重故障;
(1.2)车辆减速与控制阶段,路段层TCC按照车载设备故障等级的不同进行差异化控制,具体控制过程如下:
若为轻微故障,则事发车辆适当减速并继续行驶在自动车道,且事发点后方车辆协同减速;
若为较严重故障,则路段层TCC控制事发车辆与后方车辆协同减速,同时事发车辆完成自动/手动模式切换,经软隔离驶出自动车道并在停车区域完成故障检修;
若为严重故障,则路段层TCC计算减速缓冲区域并控制事发点后方车辆逐级减速,同时后方车辆完成自动/手动模式切换,经软隔离驶出自动车道,事发车辆减速就近停靠等待救援车辆;
(1.3)应急救援与疏散阶段,路段层TCC将事发车辆所在位置定位为事故点,按照事故点在普通车道与自动车道规划救援疏散路线;若事故车辆定位在普通车道,则应急救援车辆由正向自动车道或其他普通车道到达事故点,事发车道的其他车辆换道至临近普通车道行驶完成疏散;若事故车辆定位在自动车道,则应急救援车辆经由对向自动车道或普通车道到达事故点,事发车道的其他车辆完成自动/手动模式切换,经软隔离驶出自动车道完成疏散。进一步的,若路侧设施RSU发生故障
(2.1)故障及事故识别阶段,此时对应的事故路段路侧RSU设施不再反馈或延迟反馈或间断反馈信息至附近TCU平台,然后根据反馈异常点找出故障设备,且路侧设施故障的等级分类为:
1)自动驾驶专用道损伤较小,即:对于正常行驶影响不大的情况,依靠现有设备依然可完成自动驾驶任务(如:线路接触问题导致设备工作断断续续;信号因天气原因接收不良;因环境原因导致摄像头不清晰等);
2)自动驾驶专用道有一定损伤,即:对于正常行驶造成一定影响,但仍可依靠其它设备或手段帮助完成自动驾驶任务(如:不连续的部分路测设备(RSU)失灵;路面部分有凹陷或较小坑洞;天气原因导致的能见范围减小等);
3)自动驾驶专用道损伤较大,即:对于正常行驶产生较大影响,无法完成自动驾驶任务,必须切换至手动模式通过路段(如:部分路段连续性的设备失灵;服务器产生故障;控制中心整体断电等);
4)自动驾驶专用道路无法使用,即:由于道路障碍(如倒塌的树木;路面的大幅塌陷;车辆严重损毁造成的道路阻塞)或极端天气(如大雾;暴雨;积雪覆盖等)导致该条道路无法使用;
(2.2)车辆减速与控制阶段,依据损伤等级的不同来进行车速调整以避免事故出现:
1)自动驾驶专用道损伤较小时,对车辆正常行驶影响不大,此时车辆无需调整减速,正常行驶即可;
2)自动驾驶专用道有一定损伤时,对车辆的正常行驶造成一定影响,但仍然可依靠其它设备或手段帮助完成自动驾驶任务,此时适当通过完好的上游路侧单元RSU设备来调整车速,逐级减慢当前时速,直至通过故障路段后恢复;
3)自动驾驶专用道损伤较大时,对车辆的正常行驶产生较大影响,无法完成自动驾驶任务,此时在事故路段上游两个路段开始进行逐级减速,并在事故路段将自动驾驶车辆切换为手动模式,经过该路段后恢复至自动驾驶;
4)自动驾驶专用道路无法使用时,由于道路障碍导致该条道路无法使用,因此在事故路段上游两个路段开始进行逐级减速,并规划并道地点并入普通车道,车辆在并道后切换为手动模式,当车辆驶离该路段后转回自动车道并恢复至自动驾驶;
(2.3)应急救援与疏散阶段,根据设备故障的等级大小执行相应的应急预案与救援方案:
1)自动驾驶专用道损伤较小时,无需立即派出救援车辆进行设备维修,正常工作至日常检修时段进行统一维护;
2)自动驾驶专用道有一定损伤时,不需要立即派出救援车辆进行清障、维修和维护,通过上下游设备辅助,或调整车队车速等手段通过该路段;然后在车流量密度较低时段,派出救援车辆进行设备检测,或道路维护;
3)自动驾驶专用道损伤较大时,帮助未进入该路段车辆逐级减速并通知由自动驾驶切换为手动驾驶模式,已进入该路段的车辆通过车载系统判断情况进行手动切换;然后救援中心迅速派遣应急救援车辆,前往进行设备维修,并用临时设备搭建起一套可替代的道路自动驾驶辅助系统,在最短时间内恢复自动驾驶的正常运行;
4)自动驾驶专用道路无法使用时,迅速派遣清障车移除阻碍物,填补路面坑洞,尽力恢复通行;若是极端天气引发的通行困难情况则根据实际情况派遣车辆进行融雪,雾灯提醒,并依次调整车速等措施缓解通行压力;
上述应急救援方法说明:事故发生在自动车道,由TCC控制单元检测到路侧单元(RSU)设备故障时,派出救援抢修车辆,对路测设备进行修复,并对不可修复部分进行替换,期间由其余设备辅助完成自动驾驶系统辅助任务,其上游控制单元辅助完成使未通过该路段车辆进行逐级减速任务,确保行车安全,抢修车辆通过自动驾驶专用道或普通车道到达事故点进行抢修工作。如上图中白色车辆为救援抢修车辆,蓝色为自动驾驶车辆,红色为普通车辆。
进一步的,若发生的是交通事故
(3.1)故障及事故识别阶段,通过路侧设备RSU(雷达、摄像机等)对专用道上的交通情况监测和识别,同时通过车载设备OBU对交通事故进行报警和识别;根据上述识别信息将交通事故分为2个等级:轻微交通事故和严重交通事故;
轻微交通事故,即车载设备和人员所受损伤较轻,可通过事故责任确认后,驶出交通事故现场,即可恢复对专用道的使用,供车辆继续进行自动驾驶;
严重交通事故,即车载设备和人员均受到一定程度的损伤,丧失车辆实现自动车道行驶的功能,自动驾驶车辆自动模式转换为手动模式按钮,通过普通车道驶离,救援和维护车辆由普通车道或自动车道到达事故点,待事故完全处理后,恢复对专用道的使用;
(3.2)车辆减速与控制阶段,
若为轻微交通事故,则设置路障或打开软隔离带,事故点下游自动车辆正常驶离,事故点上游自动车辆在接收到RSU控制单元向自动驾驶专用车道上的车辆发出信号后,自动驾驶车辆进行减速,启动车辆上设有的自动驾驶车辆自动模式转换为手动模式按钮,经软隔离驶出自动车道;同时若事故责任快速确认后,则驶出交通事故现场,恢复对专用道的使用,车辆不需要由手动模式切换为自动模式,继续进行在自动驾驶车道进行行驶;
若为严重事故,则设置路障或打开软隔离带,事故点下游自动车辆正常驶离,事故点上游自动车辆在接收到RSU控制单元向自动驾驶专用车道上的车辆发出信号后,路段层TCC计算减速缓冲区域并控制事发点后方车辆逐级减速,上游车辆上设有的自动驾驶车辆自动模式转换为手动模式按钮,经软隔离驶出自动车道;
(3.3)应急救援与疏散阶段,按照事故点在自动车道规划救援疏散路线,若事故车辆定位在自动车道,则应急救援车辆经由对向自动车道或普通车道到达事故点,自动车道事故上游自动驾驶车辆完成自动/手动模式切换,经软隔离驶出自动车道完成疏散。
有益效果:本发明填补了目前自动驾驶专用道尚无相应救援预案措施的空白,为今后自动驾驶专用道的发展和应用提供了相应的保障预案。本发明将各种事故类型进行了详细分类,并给出各类型应急救援方案,优化应急救援的派出行动。在事故较轻的情景下提供了自动驾驶专用车道的自动车辆预测减速方案,减少二次或多次事故发生的可能性。
附图说明
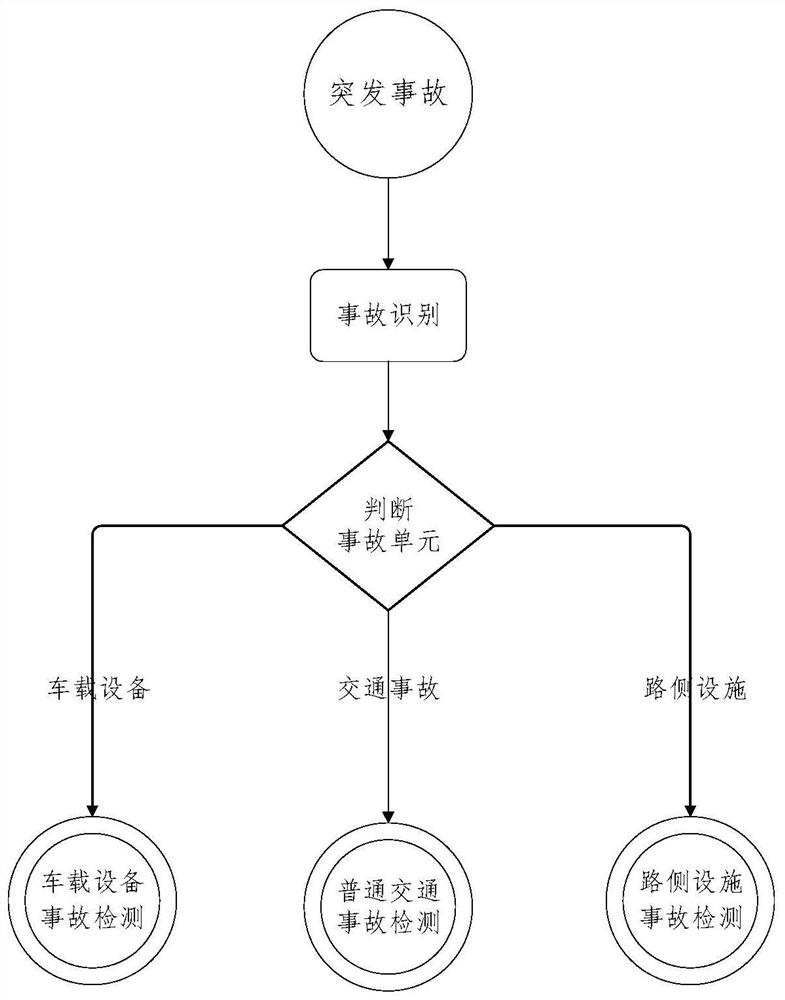
图1为本发明的整体流程示意图;
图2为本发明中车载设备故障检测与应急救援的流程示意图;
图3为本发明中路侧(RSU)设备故障检测与应急救援的流程示意图;
图4为本发明中交通事故检测与应急救援的流程示意图;
图5为实施例中车载设备故障的识别过程示意图;
图6为实施例中车载设备故障下的TCC速度控制示意图;
图7为实施例中路侧(RSU)设施故障的救援方案示意图。
具体实施方式
下面对本发明技术方案进行详细说明,但是本发明的保护范围不局限于所述实施例。
如图1所示,本发明的一种自动驾驶专用车道上故障及事故类型识别和道路救援的方法,对突发故障和事故进行事故识别,并判断事故单元的类型,根据事故单元的类型进行新颖的检测与应急救援,其中事故单元类型包括车载设备故障(OBU故障)、交通事故和路侧设施事故(RSU事故);
(1)当为车载设备故障时
(1.1)根据故障严重程度的不同,将车载设备故障分为轻微、较严重和严重3个等级进行识别;
(1.2)车辆减速与控制,即路段层TCC接收到来自车载设备的事故识别或车辆故障信息后,完成车辆减速控制与缓冲区域计算:
当车载设备出现故障时,按照车载设备故障等级进行差异化控制;若事故轻微,则事发车辆继续行驶在自动车道;若事故较严重,则事发车辆需完成自动/手动模式切换,经软隔离驶出自动车道;若事故严重,则路段层TCC需计算减速缓冲区域,事发车辆需减速停靠等待救援车辆;
(1.3)应急救援与疏散:
按照事故点进行分类,将事故地点划分为普通车道与自动车道2种类型;若车载设备故障发生在普通车道,则应急救援车辆由正向自动车道或其他普通车道到达事故点;若车载设备故障发生在自动车道,则应急救援车辆经由对向自动车道或普通车道到达事故点;
(2)当为路侧设施故障(RSU)时
(2.1)根据事故大小分为损伤较小、一定损伤、损伤较大和无法使用4种情况进行识别;
(2.2)车辆减速与控制,即路段层TCC接收到来自路侧设施的事故识别或车辆故障信息后,完成车辆减速控制与缓冲区域计算:
当路侧设施出现故障时,路段层TCC会按照车载设备故障等级进行减速方案选择;其中,若事故处于自动驾驶专用道损伤较小或自动驾驶专用道有一定损伤的情况时,自动驾驶专用道上的车辆在事故点顺流方向之前的路段进行适当逐级减速并继续行驶在自动车道;若事故较严重,处于自动驾驶专用道损伤较大的情况时,事发车辆与后方车辆协同减速,事发路段车辆完成自动/手动模式切换,以手动模式驶离该路段后切换回自动驾驶模式;若自动驾驶道路无法使用时,TCC计算减速缓冲区域并控制事发点后方车辆逐级减速,后方车辆完成自动/手动模式切换,经软隔离驶出自动车道;
(2.3)应急救援与疏散:即对于故障设备的应急救援预案则根据事故大小等级执行相应的应急预案与救援方案:由于路侧单元设施处于自动驾驶专用道一侧,因此救援抢修车辆由本向自动车道或其他普通车道到达事故点;到达后进行抢修作业,占用部分道路可通过绕行普通车道,减小交通堵塞;
(3)当为交通事故时
(3.1)根据交通事故严重程度的不同,将交通事故分为轻微和严重2个等级进行识别;
(3.2)车辆减速与控制,即路段层TCC接收事故识别信息后,完成车辆减速控制与缓冲区域计算:若事故轻微,则通过事故责任确认后,驶出交通事故现场,即可恢复对专用道的使用,供车辆继续进行自动驾驶;
若事故严重,事故点下游自动车辆由自动模式转换为手动模式按钮,通过普通车道驶离,救援和维护车辆由普通车道或自动车道到达事故点,待事故完全处理后,则恢复对专用道的使用;
(3.3)应急救援与疏散;按照事故点进行分类,将事故地点划分为自动车道类型,事故发生在自动车道,则应急救援车辆经由对向自动车道或普通车道到达事故点。
如图2所示,若车载设备OBU发生故障
(1.1)故障及事故识别阶段,通过车载或路侧设备完成事故识别与损伤评估,并将信息指令传递至路段层TCC,其识别过程如图5所示。路段层TCC在接收到故障信息后,利用TCU完成事故车辆定位,并依据事故等级的不同,采用不同的识别方法:
若车载设备所受损伤较轻,没有对车辆在专用道路的正常行驶造成显著影响,仍可通过OBU等对车辆状态检测,这种情况判断为轻微故障;
若车载设备OBU设备受到损伤,但没有丧失车辆在自动车道行驶的感知与控制功能,且车载设备能与路侧单元RSU协同完成事故识别,这种情况判断为较严重故障;
若车载设备OBU受损严重,显著影响车辆在自动车道的正常行驶,并需完全依靠路侧设施进行事故识别与信息传递,这种情况判断为严重故障;
(1.2)车辆减速与控制阶段,路段层TCC按照车载设备故障等级的不同进行差异化控制,如图6所示,具体控制过程如下:
若为轻微故障,则事发车辆适当减速并继续行驶在自动车道,且事发点后方车辆协同减速;
若为较严重故障,则路段层TCC控制事发车辆与后方车辆协同减速,同时事发车辆完成自动/手动模式切换,经软隔离驶出自动车道并在停车区域完成故障检修;
若为严重故障,则路段层TCC计算减速缓冲区域并控制事发点后方车辆逐级减速,同时后方车辆完成自动/手动模式切换,经软隔离驶出自动车道,事发车辆减速就近停靠等待救援车辆;
(1.3)应急救援与疏散阶段,路段层TCC将事发车辆所在位置定位为事故点,按照事故点在普通车道与自动车道规划救援疏散路线;若事故车辆定位在普通车道,则应急救援车辆由本向自动车道或其他普通车道到达事故点,事发车道的其他车辆换道至临近普通车道行驶完成疏散;若事故车辆定位在自动车道,则应急救援车辆经由对向自动车道或普通车道到达事故点,事发车道的其他车辆完成自动/手动模式切换,经软隔离驶出自动车道完成疏散。
如图3所示,若路侧设施RSU发生故障
(2.1)故障及事故识别阶段,此时对应的事故路段路侧RSU设备不再反馈或延迟反馈或间断反馈信息至附近TCU平台,然后根据反馈异常点找出故障设备,且路侧设施故障的等级分类为:
1)自动驾驶专用道损伤较小,即:对于正常行驶影响不大的情况,依靠现有设备依然可完成自动驾驶任务(如:线路接触问题导致设备工作断断续续;信号因天气原因接收不良;因环境原因导致摄像头不清晰等);
2)自动驾驶专用道有一定损伤,即:对于正常行驶造成一定影响,但仍可依靠其它设备或手段帮助完成自动驾驶任务(如:不连续的部分路测设备(RSU)失灵;路面部分有凹陷或较小坑洞;天气原因导致的能见范围减小等);
3)自动驾驶专用道损伤较大,即:对于正常行驶产生较大影响,无法完成自动驾驶任务,必须切换至手动模式通过路段(如:部分路段连续性的设备失灵;服务器产生故障;控制中心整体断电等);
4)自动驾驶专用道路无法使用,即:由于道路障碍(如倒塌的树木;路面的大幅塌陷;车辆严重损毁造成的道路阻塞)或极端天气(如大雾;暴雨;积雪覆盖等)导致该条道路无法使用;
(2.2)车辆减速与控制阶段,依据损伤等级的不同来进行车速调整以避免事故出现:
1)自动驾驶专用道损伤较小时,对车辆正常行驶影响不大,此时车辆无需调整减速,正常行驶即可;
2)自动驾驶专用道有一定损伤时,对车辆的正常行驶造成一定影响,但仍然可依靠其它设备或手段帮助完成自动驾驶任务,此时适当通过完好的上游路侧单元RSU设备来调整车速,逐级减慢当前时速,直至通过故障路段后恢复;
3)自动驾驶专用道损伤较大时,对车辆的正常行驶产生较大影响,无法完成自动驾驶任务,此时在事故路段上游两个路段开始进行逐级减速,并在事故路段将自动驾驶车辆切换为手动模式,经过该路段后恢复至自动驾驶;
4)自动驾驶专用道路无法使用时,由于道路障碍导致该条道路无法使用,因此在事故路段上游两个路段开始进行逐级减速,并规划并道地点并入普通车道,车辆在并道后切换为手动模式,当车辆驶离该路段后转回自动车道并恢复至自动驾驶;
(2.3)应急救援与疏散阶段,如图7所示,根据设备故障的等级大小执行相应的应急预案与救援方案:
1)自动驾驶专用道损伤较小时,无需立即派出救援车辆进行设备维修,正常工作至日常检修时段进行统一维护;
2)自动驾驶专用道有一定损伤时,不需要立即派出救援车辆进行清障、维修和维护,通过上下游设备辅助,或调整车队车速等手段通过该路段;然后在车流量密度较低时段,派出救援车辆进行设备检测,或道路维护;
3)自动驾驶专用道损伤较大时,帮助未进入该路段车辆逐级减速并通知由自动驾驶切换为手动驾驶模式,已进入该路段的车辆通过车载系统判断情况进行手动切换;然后救援中心迅速派遣应急救援车辆,前往进行设备维修,并用临时设备搭建起一套可替代的道路自动驾驶辅助系统,在最短时间内恢复自动驾驶的正常运行;
4)自动驾驶专用道路无法使用时,迅速派遣清障车移除阻碍物,填补路面坑洞,尽力恢复通行;若是极端天气引发的通行困难情况则根据实际情况派遣车辆进行融雪,雾灯提醒,并依次调整车速等措施缓解通行压力;
上述应急救援方法说明:事故发生在自动车道,由TCC控制单元检测到路侧单元设备(RSU)故障时,派出救援抢修车辆,对路测设备进行修复,并对不可修复部分进行替换,期间由其余设备辅助完成自动驾驶系统辅助任务,其上游控制单元辅助完成使未通过该路段车辆进行逐级减速任务,确保行车安全,抢修车辆通过自动驾驶专用道或普通车道到达事故点进行抢修工作。如上图中白色车辆为救援抢修车辆,蓝色为自动驾驶车辆,红色为普通车辆。
如图4所示,若发生的是交通事故
(3.1)故障及事故识别阶段,通过路侧设备RSU(雷达、摄像机等)对专用道上的交通情况监测和识别,同时通过车载设备OBU对交通事故进行报警和识别;根据上述识别信息将交通事故分为2个等级:轻微交通事故和严重交通事故;
轻微交通事故,即车载设备和人员所受损伤较轻,可通过事故责任确认后,驶出交通事故现场,即可恢复对专用道的使用,供车辆继续进行自动驾驶;
严重交通事故,即车载设备和人员均受到一定程度的损伤,丧失车辆实现自动车道行驶的功能,自动驾驶车辆自动模式转换为手动模式按钮,通过普通车道驶离,救援和维护车辆由普通车道或自动车道到达事故点,待事故完全处理后,恢复对专用道的使用;
(3.2)车辆减速与控制阶段,
若为轻微交通事故,则设置路障或打开软隔离带,事故点下游自动车辆正常驶离,事故点上游自动车辆在接收到RSU控制单元向自动驾驶专用车道上的车辆发出信号后,自动驾驶车辆进行减速,启动车辆上设有的自动驾驶车辆自动模式转换为手动模式按钮,经软隔离驶出自动车道;同时若事故责任快速确认后,则驶出交通事故现场,恢复对专用道的使用,车辆不需要由手动模式切换为自动模式,继续进行在自动驾驶车道进行行驶;
若为严重事故,则设置路障或打开软隔离带,事故点下游自动车辆正常驶离,事故点上游自动车辆在接收到RSU控制单元向自动驾驶专用车道上的车辆发出信号后,路段层TCC计算减速缓冲区域并控制事发点后方车辆逐级减速,上游车辆上设有的自动驾驶车辆自动模式转换为手动模式按钮,经软隔离驶出自动车道;
(3.3)应急救援与疏散阶段,按照事故点在自动车道规划救援疏散路线,若事故车辆定位在自动车道,则应急救援车辆经由对向自动车道或普通车道到达事故点,自动车道事故上游自动驾驶车辆完成自动/手动模式切换,经软隔离驶出自动车道完成疏散。
- 自动驾驶专用车道上故障及事故类型识别和道路救援的方法
- 一种事故道路清障救援专用车