一种空间万向旋转磁场轴线方向的测量装置及测量方法
文献发布时间:2023-06-19 09:51:02
技术领域
本发明属于机械测量技术领域,涉及一种利用旋转磁铁在磁场中的随动效应测量空间万向旋转磁场轴线方向的激光非接触检测装置及测量方法。
背景技术
胃肠胶囊内窥镜的临床应用扩展了医学诊疗视野,使体内结肠等盲区内的检查成为可能。目前投入使用的胶囊内窥镜主要依靠胃肠蠕动以及重力被动行走,不能实现姿态和运动主动控制,研究表明胶囊内窥镜在胃肠道内的漏检区域大约为百分之二十,并存在滞留于肠道内的危险。如果能实现胶囊姿态和运动主动控制,内窥镜在肠道内的检测时间将会缩短,可望提高诊疗效率,降低漏检率,提高内窥镜诊疗安全性。此外,主动控制对扩展胶囊胃镜功能十分重要,如检测胃肠道pH值生理参数,消化道内释放药物、甚至进行微创手术等操作,具有广阔的应用前景。
肠胃胶囊机器人的作业环境十分复杂,要求机器人以无缆方式驱动,研究人员发明了伸缩式、游动式、腿式等各种运动形式的胶囊机器人,其中利用外磁场对胶囊机器人实施控制的方法具有简单、可靠、无线的优点,解决了能源供应这一关键问题,被认为是最有可能实际应用的技术方案。外磁场控制可以分为两种形式,一是利用永磁体进行拖拽,二是利用亥姆霍兹线圈生成空间万向旋转磁场对胶囊机器人进行控制。前者利用永磁体产生梯度磁场,磁力与磁矩并存,姿态控制不变,精度差;后者可以产生均匀磁场,实现纯磁矩操作,控制精度显著提高,此外,利用空间万向旋转磁场对胶囊机器人进行控制具有转弯灵活、操作便捷的特点,具有良好的应用前景。因此,研究人员对空间万向磁场的产生以及控制展开了广泛的研究。
在我们课题组所申请的发明专利“空间万向叠加旋转磁场旋转轴线方位与旋向的控制方法”中(专利授权号:ZL201210039753.4),通过向三组亥姆霍兹线圈中通入一定组合形式的正弦电流信号,可以在三组亥姆霍兹线圈内部生成均匀的空间万向旋转磁场,改变输入正弦电流信号的幅值与相位,可实现对空间万向旋转磁场方向的改变,该项专利已经得到了空间万向旋转磁场的叠加公式,如下所示:
其中,
根据磁场强度与电流之间的关系,
其中,I
根据式(1)(2)的公式,向三组线圈内施加电流,可以实现空间万向旋转磁场旋转轴线方位与旋转方向在空间坐标系各个象限内的唯一性控制。
在利用空间万向磁场控制胶囊机器人对肠胃内部进行诊断的过程中,为了保证诊断的安全性,必须保证空间万向旋转磁场方向的准确性。事实上,由于控制系统的误差、输入电流的不稳定、以及生成磁场强度的不均匀性等因素的影响,实际生成的空间万向旋转磁场方向并不能与理论计算的磁场方位保持一致,需对对空间万向旋转磁场的方向进行测量与标定。
要测量实际生成旋转磁场的方向,就是测量出实际生成旋转磁场轴线方向矢量与三个坐标轴之间的夹角α、β、γ,但是,在空间坐标系内对α、β、γ进行测量是十分困难的。实际上,在专利“一种空间万向旋转磁场人机交互控制方法”(专利号:ZL201610009285.4)中采用侧摆角θ与俯仰角δ代替了原来的万向旋转磁场方向控制变量α、β、γ,从而将空间万向旋转磁场的三维叠加问题转化为平面内的两维叠加问题,这就意味着只要能够在固定坐标系内测量出磁场轴线方向矢量的侧摆角θ与俯仰角δ,就能得出空间万向旋转磁场的方向,磁场方向矢量的侧摆角θ与俯仰角δ与三轴亥姆霍兹线圈中坐标系的关系如图1所示。
为方便测量空间万向旋转磁场轴线的方向,需要借助其他物体将旋转磁场轴线的方向可视化,对旋转磁场轴线的方向进行间接测量。研究中发现,在磁场中旋转的磁铁轴线所指向的方向始终与磁场方向矢量方向保持一致,当磁场方向改变时,旋转磁铁受到力矩的作用,迅速从位置1旋转到位置2,与变化后的磁场矢量方向保持一致,这种现象我们称为随动效应,如图2所示。根据磁耦合理论,在此过程中磁体块所受到的力矩大小可根据下式计算:
其中,m为磁铁的磁矩大小,B为旋转磁场的强度,
对处于空间万向旋转磁场内的磁铁的侧摆角θ和俯仰角δ进行测量,即可得出空间旋转磁场轴线的方向信息。理论上,对于磁铁块侧摆角θ和俯仰角δ的信息可通过传感器直接测得,但是存在以下问题:由于空间万向旋转磁场是由三组亥姆霍兹线圈产生的磁场叠加而成,生成的磁场在不停的旋转,同时磁场对传感器内部器件产生干扰,由电子传感器直接得出侧摆角θ和俯仰角δ的信息十分困难,无法对生成的空间万向旋转磁场的方位进行测量与标定。
针对上述问题,本发明提出一种空间万向旋转磁场轴线方向的光学测量装置及测量方法,该装置利用随动效应对旋转磁场轴线方向矢量的侧摆角θ与俯仰角δ进行间接测量,能够获得实际生成旋转磁场轴线方位信息,为实现万向空间磁场方向误差检测以及胶囊机器人的精确控制奠定了基础。
发明内容
本发明提供一种测量空间万向旋转磁场轴线方向的装置及测量方法,即首先利用磁铁随动效应将对旋转磁场轴线方向的测量转化为对磁铁块轴线侧摆角θ与俯仰角δ的测量。其次,通过磁铁顶部同轴激光头的投影放大作用,将侧摆角与俯仰角角度测量间距进行放大,并将磁铁块轴线的方向信息反映到坐标盘上。最后,在坐标盘读出激光头光标所对应的侧摆角与俯仰角刻度,最终得到空间万向旋转磁场的方向信息。
本发明的技术方案为:
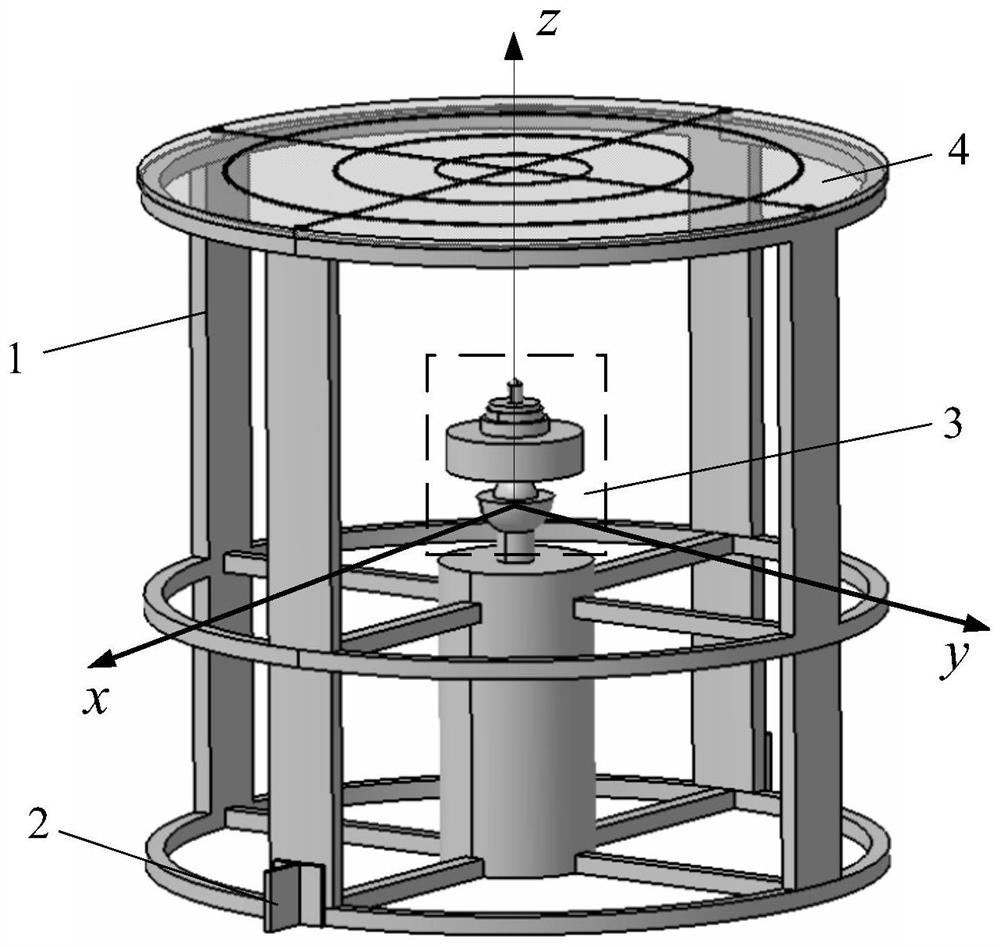
一种测量空间万向旋转磁场轴线方向的装置,所述装置包括支架1、定位板2、随动激光测量部件3以及坐标盘4,该装置中各个部分的作用以及安装方式如下:
支架1用于支撑整个装置,其底面与顶部保持水平。支架采用非导磁材料制成,较佳地采用塑料,这样既可以减轻测量装置的重量,又能防止磁场对支架产生影响,影响测量的精度。
定位板2安装于支架的前后两侧,定位板2与坐标盘x轴平行,主要用于装置放入磁场时的定位,将装置放入三组亥姆线圈内部后,调整支架前后两个定位板到同一侧线圈的距离相等,此时定位板所确定的平面与与两侧线圈所确定的平面平行,坐标盘x轴与线圈内部坐标系x轴方向一致,即可完成装置的初始定位。
随动激光测量部件3中包括以下零件:球面副底座5、球面副球体6、装置外壳7、配重环8、圆柱磁铁块9、供电电池10、外壳端盖11、激光头12。将该装置放入稳定的旋转磁场后,磁铁块9带动装置外壳7与配重环8绕球面副底座5定点万向转动,磁铁块稳定后,激光头12将光标打在坐标盘4上,通过坐标盘4上刻度可以读出万向旋转磁场轴线的方向信息。
圆柱磁铁块9与装置外壳7固连在一起,该圆柱磁铁块采用径向磁化方式制成,当磁铁块9随旋转磁场转动时,装置外壳7同步转动。装置外壳7通过螺纹连接与球面副球体6固定在一起,球面副底座采用螺纹连接方式固定在支架1上,这样能够保证磁铁块9与外壳8绕自身轴线转动,又能根据磁场方向的变化完成侧摆与俯仰。为了便于下一步对于侧摆角和俯仰角的测量,将球面副球体6的中心点O作为坐标系的原点。
配重环8由非导磁材料制成,较佳地采用不锈钢,与装置外壳7同轴固连,能够随磁铁块9同步转动,其作用是增加部件3的质量,减少工作过程中的振动,增强稳定性,保证装置测量的精度。
激光头12与供电电池10之间由壳体端盖11隔开,壳体端盖11中央有小孔,可以保证供电导线的通过。激光头12安装在壳体端盖11的上端,激光头12的轴线与磁铁块轴线重合,这样激光头12发出的激光就将磁铁块轴线延长,激光与坐标系xy平面的夹角就是旋转磁场方向的俯仰角δ,激光与坐标系xz平面的夹角就是旋转磁场的侧摆角θ。
坐标盘4安装于支架1顶端,坐标盘4的中心与z轴相重合,坐标盘x轴与定位板2所确定的平面平行,坐标盘4上的刻度划分与俯仰角和侧摆角一一对应,当激光头光标打到坐标盘4上时,通过坐标盘4上的刻度标识可以直接读出旋转磁场轴线的俯仰角与侧摆角。为保证激光的通过,坐标盘4采用折射率小的透明材料制作。
为更好说明坐标盘上的刻度划分,做出以下假设:实际生成磁场轴线方向与z轴相重合时,激光正好打在坐标盘4的中心点O
其中,h为球面副球体中心点O距离支架上方坐标盘4的距离。
为了方便快速地从坐标盘4上读出俯仰角δ的值,可以等角度的在坐标盘4上画出刻度,俯仰角的刻度划分如图4所示,假设坐标盘上每小格代表俯仰角角度为Δδ,则在坐标纸上每小格之间的距离l
每个格点的俯仰角坐标值可以根据下式确定:
δ
其中Δδ的值越小,能够测得的俯仰角度数越精确。当激光灯光标打在俯仰角坐标值δ
一种利用空间万向旋转磁场轴线方向装置的测量方法,包括以下步骤:
1)将测量装置放入三组亥姆霍兹线圈内部,调整装置位置,使得其底面与底部线圈所确定的平面平行,装置支架上定位板与侧面线圈所确定平面平行,保证坐标盘x轴方向与线圈内部坐标系x轴方向一致,并打开装置电源;
2)打开空间万向旋转磁场发生装置,输入频率、俯仰角、侧摆角等参数,等待随动激光测量部件稳定;
3)读取激光头打在坐标盘上光标所对应的俯仰角与侧摆角刻度,获取实际生成旋转磁场轴线方向信息。
本发明的效果和益处是:
本发明提出一种空间万向旋转磁场轴线方向的测量装置及测量方法,利用磁铁随动效应将对旋转磁场轴线方向的测量转化为对磁铁块轴线方向的测量,并通过与圆柱磁铁同轴激光头的光学放大作用,将磁铁轴线末端位移变化距离放大并投影到坐标盘,最终能够在坐标盘上读出万向旋转磁场轴线方向信息。本发明实现了对旋转磁场侧摆角以及俯仰角的测量,确定了实际生成的空间万向旋转磁场轴线的方向,与理论方向对比,可以得到生成磁场的方向误差。该方法对实现空间旋转磁场的闭环控制,提高磁场方向的精度具有重要意义,有利于空间万向旋转磁场对胶囊机器人进行精准控制。
附图说明
图1是空间万向旋转磁场俯仰角与侧摆角方向示意图。
图2是磁铁在空间万向旋转磁场中的随动效应示意图。
图3是磁场俯仰角与坐标盘尺度关系示意图。
图4是磁场俯仰角角度划分与坐标盘俯仰角刻度之间关系示意图。
图5是本发明中测量空间万向旋转磁场方向的装置。
图6是本发明中装置部件3的详细组成图。
图7是本发明中所提出装置的坐标盘简易图。
图中:位置1空间万向旋转磁场轴线初始位置;
位置2空间万向旋转磁场改变后轴线位置;
1支架;2定位板;3随动激光测量部件;4坐标盘;5球面副底座;6球面副球体;7装置外壳;8配重环;9圆柱磁铁块;10供电电池;11外壳端盖;12激光头。
具体实施方式
以下结合附图详细叙述本发明的具体实施例。
图5所示是根据上述步骤设计出的一种能够测量万向旋转磁场轴线方向的装置,该装置包括支架1、定位板2、随动激光测量部件3以及坐标盘4,部件3由球面副底座5、球面副球体6、装置外壳7、配重环8、磁铁块9、供电电池10、外壳端盖11以及激光头12组成。该装置能够测得的俯仰角范围为30°~90°,侧摆角范围为0~360°。将该装置按照特定的方位放入三组亥姆霍兹线圈内部,然后向三组亥姆霍兹线圈通入电流,磁铁块9带动装置外壳7与配重环8绕球面副底座5做定点万向转动,磁铁块9轴线指向万向旋转磁场轴线方向,外壳端盖11上面的激光头12将光标打到如图7所示的坐标盘4上,通过坐标盘4上最大圆外侧标识的刻度,可以得到万向旋转磁场在坐标系中的侧摆角θ。通过光标距离圆心点O
具体步骤如下:
1.将该装置放入三组亥姆霍兹线圈内部,调整装置位置,使得支架底面与线圈2(图1所示)所确定平面平行,支架前后两块定位板距离线圈1所确定平面距离相同,然后打开装置电源。
2.启动万向旋转磁场生成装置,在控制器界面输入电流频率为8Hz,磁场俯仰角为42°,侧摆角为123°的参数,等待装置稳定。
3.装置稳定后,激光头的光标打在坐标盘的Q点,如图7中所示,根据坐标盘刻度可以读出实际生成磁场俯仰角为40度,侧摆角为124度。利用理论输入值与测量所得实际值相比较,可以得到磁场方向俯仰角误差为2度,磁场方向侧摆角误差为1度。
- 一种空间万向旋转磁场轴线方向的测量装置及测量方法
- 一种空间万向旋转磁场轴线方向的测量装置及测量方法