一种基于AGV小车的工业运输机器人
文献发布时间:2023-06-19 09:54:18
技术领域
本发明涉及运输设备技术领域,具体是涉及一种基于AGV小车的工业运输机器人。
背景技术
AGV(Automated Guided Vehicles)又名无人搬运车、自动导航车或者激光导航车,AGV小车的显著特点的是无人驾驶,AGV小车上装备有自动导向系统,可以保障系统在不需要人工引航的情况下就能够沿预定的路线自动行驶,将货物或物料自动从起始点运送到目的地。AGV小车的另一个特点是柔性好,自动化程度高和智能化水平高,AGV小车的行驶路径可以根据仓储货位要求、生产工艺流程等改变而灵活改变,并且运行路径改变的费用与传统的输送带和刚性的传送线相比非常低廉。AGV小车依靠自带的蓄电池提供动力,运行过程中无噪声、无污染,可以应用在多种工业场所。
AGV小车进行运输时,一般其上方即为运载台,现有的运载台结构简单,难以对物品进行封闭运输,且运载台不能够自动打开或者闭合,若载物点和卸料点配有自动上料和自动取料装置,这就需要运载台能够自动开启。
因此,需要提供一种基于AGV小车的工业运输机器人,旨在解决上述问题。
发明内容
针对现有技术存在的不足,本发明的目的在于提供一种基于AGV小车的工业运输机器人,以解决上述背景技术中存在的问题。
为实现上述目的,本发明提供如下技术方案:
一种基于AGV小车的工业运输机器人,包括AGV小车,所述AGV小车的顶面上固定安装有第一电机、第二电机和支撑架,支撑架上安装有收放线辊,第二电机的输出轴与收放线辊连接,收放线辊的外侧绕设有钢丝绳,所述第一电机的前方设置有后边板,后边板的下端与AGV小车固定连接,后边板的上边缘处转动连接有顶板,顶板的前边缘处转动连接有前边板,所述顶板上表面的前端处和后端处均设置有钢丝绳导向装置,所述前边板的前面固定连接有固线环,钢丝绳的一端与固线环连接,钢丝绳的另一端与收放线辊连接,且钢丝绳贯穿钢丝绳导向装置,所述后边板的上端连接有竖直限位板,顶板的前端连接有水平限位板,所述第一电机的输出轴上同轴固定连接有转动轴,转动轴与侧边板的下端处固定连接,所述侧边板和第一电机的数量均为两个且均关于后边板的对称面左右对称设置,当前边板、顶板以及侧边板关闭时,侧边板位于后边板、前边板以及顶板的包围中,且侧边板的后侧面与后边板接触,侧边板的前侧面与前边板接触,侧边板的上表面与顶板的底面接触。
作为本发明进一步的方案,所述收放线辊的左右两端均与支撑架转动连接,支撑架位于后边板的后方,支撑架位于两个第一电机之间,所述收放线辊的中心线垂直于转动轴的中心线,收放线辊用来收取或者放长钢丝绳,进而控制前边板和顶板的闭合状态。
作为本发明进一步的方案,所述转动轴水平设置,转动轴的外侧设置有轴承座,轴承座中安装有轴承,所述轴承的内孔与转动轴的侧面固定连接,轴承座用来支撑转动轴和侧边板,所述转动轴贯穿后边板,所述前边板的下边缘的左右端处均设置有缺口,当前边板关闭时,转动轴贯穿缺口。
作为本发明进一步的方案,所述侧边板的内侧面上设置有夹持组件,所述夹持组件由移动板和夹持板组成,侧边板的左端和右端处连接有导向柱,所述移动板上设置有光滑通槽一,夹持板上设置有光滑通槽二,一根导向柱同时与光滑通槽一和光滑通槽二滑动配合连接。
作为本发明进一步的方案,所述移动板和夹持板的数量均为两个且均关于后边板的对称面左右对称设置,移动板和夹持板之间连接有数根压缩弹簧,夹持板的表面粘接有缓冲垫,压缩弹簧和缓冲垫起到缓冲作用,所述光滑通槽一的侧面设置有螺纹通孔,螺纹通孔上配合连接有螺栓,螺栓用来固定锁紧移动板,根据需要输送的物品大小调整移动板的位置,移动板的位置确定好后,拧紧螺栓。
作为本发明进一步的方案,所述AGV小车内部设置蓄电池、充电装置、驱动装置、导向装置、车上控制器以及通信装置,所述驱动装置是控制AGV小车正常运行的装置,所述导向装置用来接受导引系统的方向信息,车上控制器用来接受控制中心的指令并执行相应的指令,通信装置能够实现AGV小车与地面控制站及地面监控设备之间的信息交换,所述蓄电池与第一电机和第二电机电性连接,所述车上控制器亦与第一电机和第二电机电性连接,车上控制器能够控制第一电机和第二电机的工作状态。
作为本发明进一步的方案,所述钢丝绳导向装置由上压辊、下压辊以及固定支架组成,固定支架与顶板的上表面固定连接,所述上压辊和下压辊的左右两端均与固定支架转动连接,上压辊和下压辊之间的区域即为导向区,钢丝绳贯穿导向区。
作为本发明进一步的方案,所述前边板的下端固定连接有铁片,所述AGV小车上表面的前端处设置有磁条,磁条用来吸引铁片,使得前边板能够顺利闭合。
作为本发明进一步的方案,所述竖直限位板前侧面的上端设置有凸块,所述水平限位板下表面的前端亦设置有凸块,水平限位板和竖直限位板用来对前边板和顶板的开启位置进行限位,凸块的设置使得前边板和顶板能够顺利闭合。
综上所述,本发明的有益效果是:
通过后边板、侧边板、前边板以及顶板的设置,本发明能够对物品进行密封运输,避免物品在运输过程中被车间的灰尘污染;通过收放线辊、钢丝绳以及转动轴的设置,侧边板、前边板和顶板能够自动打开和关闭,方便进行装料和卸料。
附图说明
图1为一种基于AGV小车的工业运输机器人的侧视结构示意图。
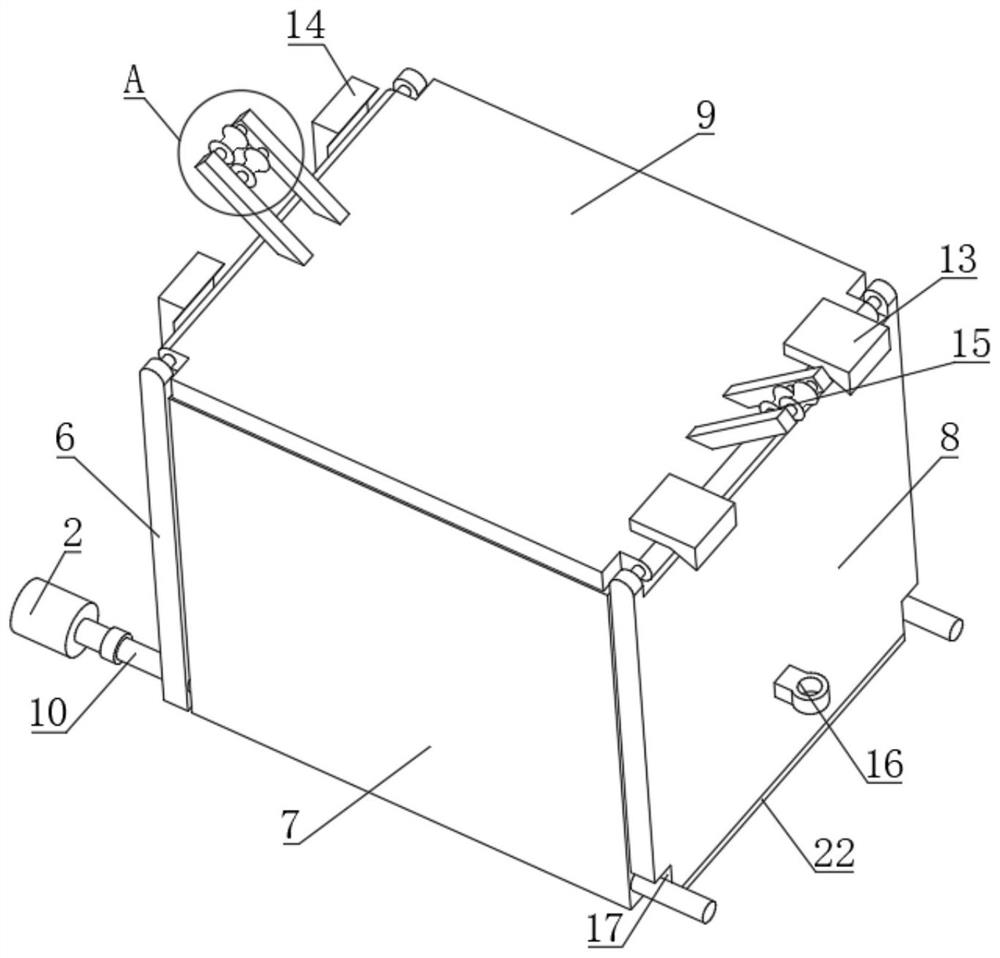
图2为一种基于AGV小车的工业运输机器人的部分三维结构示意图。
图3为图2中A处的局部放大示意图。
图4为一种基于AGV小车的工业运输机器人中夹持组件的三维结构示意图。
图5为一种基于AGV小车的工业运输机器人中夹持组件的俯视结构示意图。
图6为图4中B处的局部放大示意图。
附图标记:1-AGV小车、2-第一电机、3-支撑架、4-收放线辊、5-钢丝绳、6-后边板、7-侧边板、8-前边板、9-顶板、10-转动轴、11-轴承座、12-竖直限位板、13-水平限位板、14-凸块、15-钢丝绳导向装置、16-固线环、17-缺口、18-固定支架、19-上压辊、20-下压辊、21-磁条、22-铁片、23-导向柱、24-移动板、25-夹持板、26-压缩弹簧、27-缓冲垫、28-螺栓、29-光滑通槽一、30-光滑通槽二。
具体实施方式
为了使本发明的目的、技术方案及优点更加清晰,以下结合附图及具体实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
在本发明的描述中,术语“中心”、“横向”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
实施例1
参见图1至图6,一种基于AGV小车的工业运输机器人,包括AGV小车1,所述AGV小车1的顶面上固定安装有第一电机2、第二电机和支撑架3,支撑架3上安装有收放线辊4,第二电机的输出轴与收放线辊4连接,收放线辊4的外侧绕设有钢丝绳5,所述第一电机2的前方设置有后边板6,后边板6的下端与AGV小车1固定连接,后边板6的上边缘处转动连接有顶板9,顶板9的前边缘处转动连接有前边板8,所述顶板9上表面的前端处和后端处均设置有钢丝绳导向装置15,所述前边板8的前面固定连接有固线环16,钢丝绳5的一端与固线环16连接,钢丝绳5的另一端与收放线辊4连接,且钢丝绳5贯穿钢丝绳导向装置15,所述后边板6的上端连接有竖直限位板12,顶板9的前端连接有水平限位板13,所述第一电机2的输出轴上同轴固定连接有转动轴10,转动轴10与侧边板7的下端处固定连接,所述侧边板7和第一电机2的数量均为两个且均关于后边板6的对称面左右对称设置,当前边板8、顶板9以及侧边板7关闭时,侧边板7位于后边板6、前边板8以及顶板9的包围中,且侧边板7的后侧面与后边板6接触,侧边板7的前侧面与前边板8接触,侧边板7的上表面与顶板9的底面接触。
所述收放线辊4的左右两端均与支撑架3转动连接,支撑架3位于后边板6的后方,支撑架3位于两个第一电机2之间,所述收放线辊4的中心线垂直于转动轴10的中心线,收放线辊4用来收取或者放长钢丝绳5,进而控制前边板8和顶板9的闭合状态。
所述转动轴10水平设置,转动轴10的外侧设置有轴承座11,轴承座11中安装有轴承,所述轴承的内孔与转动轴10的侧面固定连接,轴承座11用来支撑转动轴10和侧边板7,所述转动轴10贯穿后边板6,所述前边板8的下边缘的左右端处均设置有缺口17,当前边板8关闭时,转动轴10贯穿缺口17。
所述侧边板7的内侧面上设置有夹持组件,所述夹持组件由移动板24和夹持板25组成,侧边板7的左端和右端处连接有导向柱23,所述移动板24上设置有光滑通槽一29,夹持板25上设置有光滑通槽二30,一根导向柱23同时与光滑通槽一29和光滑通槽二30滑动配合连接。
所述移动板24和夹持板25的数量均为两个且均关于后边板6的对称面左右对称设置,移动板24和夹持板25之间连接有数根压缩弹簧26,夹持板25的表面粘接有缓冲垫27,压缩弹簧26和缓冲垫27起到缓冲作用,所述光滑通槽一29的侧面设置有螺纹通孔,螺纹通孔上配合连接有螺栓28,螺栓28用来固定锁紧移动板24,根据需要输送的物品大小调整移动板24的位置,移动板24的位置确定好后,拧紧螺栓28。
实施例2
参见图1至图6,本实施方式是对具体实施例1所述的一种基于AGV小车的工业运输机器人作进一步说明,本实施方式中,所述AGV小车内部设置蓄电池、充电装置、驱动装置、导向装置、车上控制器以及通信装置,所述驱动装置是控制AGV小车正常运行的装置,所述导向装置用来接受导引系统的方向信息,车上控制器用来接受控制中心的指令并执行相应的指令,通信装置能够实现AGV小车与地面控制站及地面监控设备之间的信息交换,AGV小车为现有技术,这里不再赘述,所述蓄电池与第一电机2和第二电机电性连接,所述车上控制器亦与第一电机2和第二电机电性连接,车上控制器用来控制第一电机2和第二电机的工作状态。
所述钢丝绳导向装置15由上压辊19、下压辊20以及固定支架18组成,固定支架18与顶板9的上表面固定连接,所述上压辊19和下压辊20的左右两端均与固定支架18转动连接,上压辊19和下压辊20之间的区域即为导向区,钢丝绳5贯穿导向区。
所述前边板8的下端固定连接有铁片22,所述AGV小车1上表面的前端处设置有磁条21,磁条21用来吸引铁片22,使得前边板8能够顺利闭合。
所述竖直限位板12前侧面的上端设置有凸块14,所述水平限位板13下表面的前端亦设置有凸块14,水平限位板13和竖直限位板12用来对前边板8和顶板9的开启位置进行限位,凸块14的设置使得前边板8和顶板9能够顺利闭合,本实施例其它结构及连接方式与具体实施例1完全相同。
本发明实施例的工作过程为:当AGV小车1按照预定控制路线行驶到在载物点时,AGV小车1停止移动,并驱动第二电机使得收放线辊4转动,收放线辊4开始收回钢丝绳5,前边板8向上转动直到与水平限位板13接触,收放线辊4继续转动,前边板8与顶板9同时开始转动,直到顶板9与竖直限位板12接触,收放线辊4停止转动,接着车上控制器驱动第一电机2,转动轴10开始转动,使得两个侧边板7向外打开,至此,侧边板7、前边板8以及顶板9全部打开,将需要输送的物品放到AGV小车1的上表面即可,之后,车上控制器再次驱动第一电机2,两个侧边板7关闭,然后驱动第二电机,使得收放线辊4放出钢丝绳5,前边板8与顶板9闭合,接着,AGV小车1按照预定控制路线行驶到在卸物点,再次自动打开侧边板7、前边板8以及顶板9,方便进行卸物,另外,在运输过程中夹持组件能够将物品夹稳,保证了运输的平稳性。
以上仅对本发明的较佳实施例进行了详细叙述,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种基于AGV小车的工业运输机器人
- 一种基于机器人和AGV小车的搬运方法、机器人