一种多足智能越障机器人
文献发布时间:2023-06-19 09:54:18
技术领域
本发明涉及机器人领域,更具体的说是一种多足智能越障机器人。
背景技术
例如公开号为CN207984997U一种越障机器人和越障系统,涉及机器人技术 领域。该越障机器人包括机器人车身、主动轮和从动轮,车身具有车头和车尾, 主动轮和从动轮分别与机器人车身旋转连接,并分别靠近车头和车尾设置。越 障机器人还包括第一电磁铁和磁性件。第一电磁铁与机器人车身连接,并设置 于车尾和从动轮之间。第一电磁铁用于选择性地与磁性件相斥。该越障机器人 越障能力强,行驶平稳,安全系数高;但该机器人的主动轮和从动轮不能够单 独调节,不适合复杂地形的越障。
发明内容
本发明的目的是提供一种多足智能越障机器人,可以适合复杂地形的越障。
本发明的目的通过以下技术方案来实现:
一种多足智能越障机器人,包括主架,还包括越障足,所述越障足包括支 撑架、电动推杆Ⅰ和万向轮,所述支撑架下端的前后两端均固接一个电动推杆 Ⅰ,每个电动推杆Ⅰ的活动端均安装一个万向轮,所述越障足镜像对称设有两 个,两个支撑架分别固接在主架的左右两端。
该多足智能越障机器人还包括增稳柱,主架的中部固接增稳柱。
该多足智能越障机器人还包括,所述该多足智能越障机器人还包括双向丝 杠、限位杆、调节座、电机Ⅰ和驱动机构,所述双向丝杠的两端分别转动连接 在主架的两端,限位杆的两端分别固接在主架的两端,所述电机Ⅰ安装在主架 上,电机Ⅰ的输出轴与双向丝杠固接,所述驱动机构包括十字支撑杆、十字套 管、电动推杆Ⅱ、电机Ⅱ和主动轮,十字支撑杆的左右两侧均的滑动连接一个 十字套管,两个十字套管的下端均固接一个电动推杆Ⅱ,两个电动推杆Ⅱ的活 动端均固接一个轴承座,两个所述的轴承座上均固接一个电机Ⅱ,两个电机Ⅱ 的输出轴分别转动连接在两个轴承座上,所述驱动机构镜像对称设有两个,其 中一个驱动机构锁包括的两个十字套管的外端分别固接在两个调节座的前侧, 另外一个驱动机构锁包括的两个十字套管的外端分别固接在两个调节座的后 侧,两个十字支撑杆的内端分别固接在增稳柱的前后两端,双向丝杠的中部转 动连接在增稳柱上,限位杆穿过增稳柱。
所述主动轮采用充气橡胶轮。
该多足智能越障机器人还包括边架、保护栏、轴和导轮,所述边架镜像对 称设有两个,两个边架分别固接在两个调节座的上端,两个边架的前后两端均 铰接连接一个保护栏的外端,位于前侧两个保护栏的内端铰接,位于后侧两个 保护栏的内端铰接,每个保护栏上端的左右两侧均固接一个轴,每个轴的上端 均固接一个导轮,导轮的边端位于下方保护栏的前后两侧,位于前侧的两个保 护栏和位于后侧的两个保护栏的铰接处均向内凹,位于前后两侧的保护栏分别 位于两个驱动机构的前后两侧。
该多足智能越障机器人还包括承载台和调节板,所述承载台固接在主架和 增稳柱的上端,调节板设置在承载台上端的右侧。
该多足智能越障机器人还包括电动推杆Ⅱ,所述电动推杆Ⅱ固接在承载台 上端的边端,电动推杆Ⅱ的活动端与调节板的左端固接,调节板的两端分别延 伸至承载台的前后两端。
该多足智能越障机器人还包括容体、螺栓、通口、夹持板、杆、限位板、 配合座和弹簧,所述位于左侧边架的上端固接两个容体,承载台的左侧设有两 个通口,夹持板左端的前后两端均固接一个杆,限位板固接在两个杆的左端, 两个杆上均滑动连接一个配合座,两个配合座分别配合在两个容体内,配合座 与容体之间通过螺栓固接,两个杆上均套有弹簧,弹簧的两端分别与夹持板和 配合座接触,两个配合座分别能够在两个通口内左右运动,夹持板位于调节板 的正左侧。
该多足智能越障机器人还包括导轮,所述导轮采用橡胶材料。
本发明一种多足智能越障机器人的有益效果为:
每个主动轮通过电动推杆Ⅱ实现驱动升降,进而当其中一个万向轮先行升 高准备约障时,与其最近的主动轮能够与不同高度的底面接触实现支撑,避免 越障倾倒。位于左右两侧的主动轮互相靠近或互相远离可增强对重心的支撑, 对抗下落冲击,有利于平稳负重。导轮便于在楼梯边端进行导向,无需精准控 制主动轮的转速实现转弯,所述中间窄两边宽的保护结构便于通过螺旋楼梯中 弯曲的壁面,不发生刮蹭。
附图说明
下面结合附图和具体实施方法对本发明做进一步详细的说明。
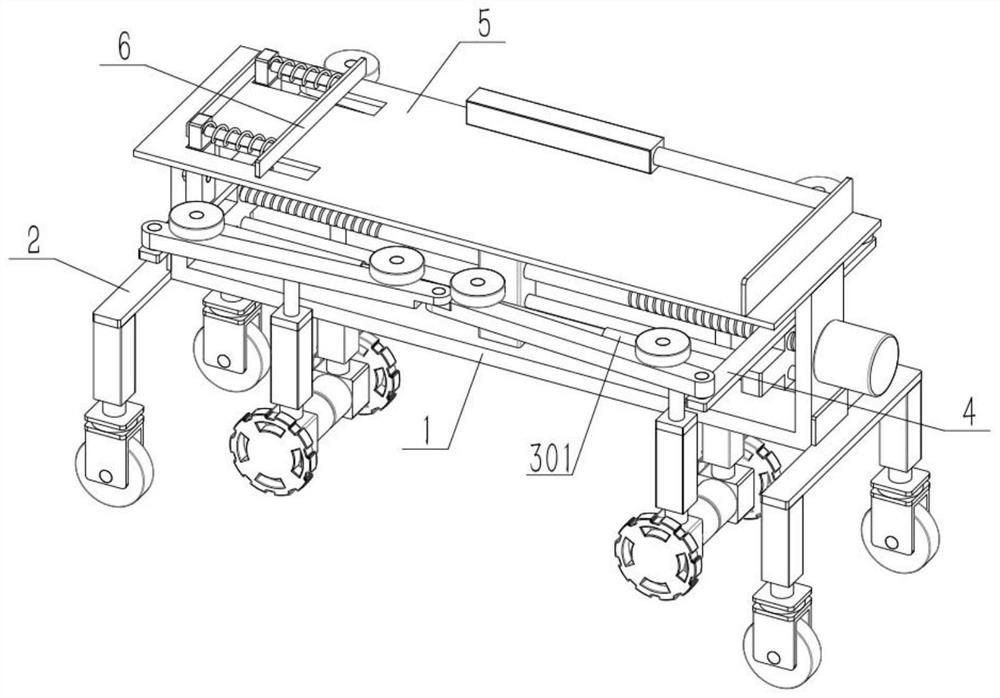
图1是本发明一种多足智能越障机器人的整体结构示意图;
图2是本发明的部分结构示意图一;
图3是本发明的部分结构示意图二;
图4是本发明的部分结构示意图三;
图5是本发明的部分结构示意图四;
图6是本发明的部分结构示意图五;
图7是本发明的部分结构示意图六;
图8是本发明的部分结构示意图七。
图中:主架1;双向丝杠101;限位杆102;调节座103;电机Ⅰ104;增稳 柱105;支撑架2;电动推杆Ⅰ201;万向轮202;十字支撑杆3;十字套管301; 电动推杆Ⅱ302;电机Ⅱ303;主动轮304;边架4;保护栏401;轴402;导轮 403;容体404;螺栓405;承载台5;电动推杆Ⅱ501;调节板502;通口503; 夹持板6;杆601;限位板602;配合座603;弹簧604。
具体实施方式
下面结合附图对本发明作进一步详细说明。
具体实施方式一:
如图所示,一种多足智能越障机器人,包括主架1,还包括越障足,所述越 障足包括支撑架2、电动推杆Ⅰ201和万向轮202,所述支撑架2下端的前后两 端均固接一个电动推杆Ⅰ201,每个电动推杆Ⅰ201的活动端均安装一个万向轮 202,所述越障足镜像对称设有两个,两个支撑架2分别固接在主架1的左右两 端。启动电动推杆Ⅰ201,电动推杆Ⅰ201能够带动万向轮202升降,进而任意 一个万向轮202的高度可以单独调节,以便于通过不同万向轮202依次通过前 方障碍。
具体实施方式二:
如图所示,该多足智能越障机器人还包括增稳柱105,主架1的中部固接增 稳柱105。增稳柱105的上端用于安装平台结构,所述平台结构用于承载物品, 即托运结构。
具体实施方式三:
如图所示,该多足智能越障机器人还包括,所述该多足智能越障机器人还 包括双向丝杠101、限位杆102、调节座103、电机Ⅰ104和驱动机构,所述双 向丝杠101的两端分别转动连接在主架1的两端,限位杆102的两端分别固接 在主架1的两端,所述电机Ⅰ104安装在主架1上,电机Ⅰ104的输出轴与双向 丝杠101固接,所述驱动机构包括十字支撑杆3、十字套管301、电动推杆Ⅱ302、 电机Ⅱ303和主动轮304,十字支撑杆3的左右两侧均的滑动连接一个十字套管 301,两个十字套管301的下端均固接一个电动推杆Ⅱ302,两个电动推杆Ⅱ302的活动端均固接一个轴承座,两个所述的轴承座上均固接一个电机Ⅱ303,两个 电机Ⅱ303的输出轴分别转动连接在两个轴承座上,所述驱动机构镜像对称设有 两个,其中一个驱动机构锁包括的两个十字套管301的外端分别固接在两个调 节座103的前侧,另外一个驱动机构锁包括的两个十字套管301的外端分别固 接在两个调节座103的后侧,两个十字支撑杆3的内端分别固接在增稳柱105 的前后两端,双向丝杠101的中部转动连接在增稳柱105上,限位杆102穿过 增稳柱105。启动电机Ⅱ303,电机Ⅱ303的输出轴能够带动主动轮304转动, 每个主动轮304通过单独驱动实现转速不同进而便于转弯或越障。每个主动轮304通过电动推杆Ⅱ302实现驱动升降,进而当其中一个万向轮202先行升高准 备约障时,与其最近的主动轮304能够与不同高度的底面接触实现支撑,避免 约越障倾倒。启动电机Ⅰ104,电机Ⅰ104的输出轴能够带动双向丝杠101转动, 双向丝杠101能够带动两个调节座103互相靠近或互相远离,进而两个调节座 103带动位于左右两侧的十字套管301互相靠近或互相远离,从而使位于左右两 侧的主动轮304互相靠近或互相远离。当本发明负重攀爬或下楼梯使特别是下 螺旋楼梯,使位于左右两侧的主动轮304靠近,增强对重心的支撑,对抗下落 冲击,有利于平稳负重。在螺旋楼梯旋转处,距离较远的两个台阶之间的夹角 较大,而相邻的两个台阶接近互相平行,将位于左右两侧的主动轮304靠近, 进而使两侧的主动轮304分别处于两个接近互相平行的台阶上利于行进。例如 在攀爬时,左侧的主动轮304位于下方台阶的水平面上,右侧的主动轮304位 于相邻上方台阶的水平面上,能够同步提供动力。若左右两侧的主动轮304间 距较远分别在夹角较大的两个台阶上时,位于右侧的两个主动轮304很可能其 中一个在下方台阶上,另外一个在上方台阶上,进而先攀爬的主动轮304导致 另外一个主动轮304悬空,不利于螺旋楼梯的攀爬,进行下楼梯也同理,集中 靠近的主动轮304位于左侧或位于右侧的主动轮304能够同时下落在同一个台 阶上,进而持续平稳的提供动力。
具体实施方式四:
如图所示,所述主动轮304采用充气橡胶轮。攀爬或下楼时具有减震与降 噪的效果。
具体实施方式五:
如图所示,该多足智能越障机器人还包括边架4、保护栏401、轴402和导 轮403,所述边架4镜像对称设有两个,两个边架4分别固接在两个调节座103 的上端,两个边架4的前后两端均铰接连接一个保护栏401的外端,位于前侧 两个保护栏401的内端铰接,位于后侧两个保护栏401的内端铰接,每个保护 栏401上端的左右两侧均固接一个轴402,每个轴402的上端均固接一个导轮 403,导轮403的边端位于下方保护栏401的前后两侧,位于前侧的两个保护栏401和位于后侧的两个保护栏401的铰接处均向内凹,位于前后两侧的保护栏401分别位于两个驱动机构的前后两侧。保护栏401用于保护驱动机构,当两个 边架4靠近时,位于左右两侧的主动轮304靠近,与此同时位于前侧或后侧的 两个保护栏401进一步向内凹陷,实现中间窄两边宽的保护结构,中间窄的部 分也应宽于两个驱动机构,实现保护,导轮403便于在楼梯边端进行导向,无 需精准控制主动轮304的转速实现转弯,所述中间窄两边宽的保护结构便于通 过螺旋楼梯中弯曲的壁面,不发生刮蹭。
具体实施方式六:
如图所示,该多足智能越障机器人还包括承载台5和调节板502,所述承载 台5固接在主架1和增稳柱105的上端,调节板502设置在承载台5上端的右 侧。
具体实施方式七:
如图所示,该多足智能越障机器人还包括电动推杆Ⅱ501,所述电动推杆Ⅱ 501固接在承载台5上端的边端,电动推杆Ⅱ501的活动端与调节板502的左端 固接,调节板502的两端分别延伸至承载台5的前后两端。启动电动推杆Ⅱ501, 电动推杆Ⅱ501的活动端带动调节板502左右运动,调节板502的位置可以改变, 适应大小不同的物品,调节板502用于防止攀爬或下降时导致运载的物体滑落。
具体实施方式八:
如图所示,该多足智能越障机器人还包括容体404、螺栓405、通口503、 夹持板6、杆601、限位板602、配合座603和弹簧604,所述位于左侧边架4 的上端固接两个容体404,承载台5的左侧设有两个通口503,夹持板6左端的 前后两端均固接一个杆601,限位板602固接在两个杆601的左端,两个杆601 上均滑动连接一个配合座603,两个配合座603分别配合在两个容体404内,配 合座603与容体404之间通过螺栓405固接,两个杆601上均套有弹簧604,弹 簧604的两端分别与夹持板6和配合座603接触,两个配合座603分别能够在 两个通口503内左右运动,夹持板6位于调节板502的正左侧。夹持板6结合 调节板502使用可以夹持物品,进而使物品得到更好的固定,夹持板6与调节 板502的间距可调,进而可以夹持大小不同的物品,夹持板6可以随越障模式 进行适应性调整,如在螺旋楼梯中,夹持板6会自动略微靠近调节板502,实现 临时增大夹紧力,避免爬楼或下落时导致物品掉落。避免长时间夹紧力过大导 致外包装或物品损坏。
具体实施方式九:
如图所示,该多足智能越障机器人还包括导轮403,所述导轮403采用橡胶 材料。
本发明的一种多足智能越障机器人,其工作原理为:
启动电动推杆Ⅰ201,电动推杆Ⅰ201能够带动万向轮202升降,进而任意 一个万向轮202的高度可以单独调节,以便于通过不同万向轮202依次通过前 方障碍。增稳柱105的上端用于安装平台结构,所述平台结构用于承载物品, 即托运结构。启动电机Ⅱ303,电机Ⅱ303的输出轴能够带动主动轮304转动, 每个主动轮304通过单独驱动实现转速不同进而便于转弯或越障。每个主动轮 304通过电动推杆Ⅱ302实现驱动升降,进而当其中一个万向轮202先行升高准 备约障时,与其最近的主动轮304能够与不同高度的底面接触实现支撑,避免 约越障倾倒。启动电机Ⅰ104,电机Ⅰ104的输出轴能够带动双向丝杠101转动, 双向丝杠101能够带动两个调节座103互相靠近或互相远离,进而两个调节座 103带动位于左右两侧的十字套管301互相靠近或互相远离,从而使位于左右两 侧的主动轮304互相靠近或互相远离。当本发明负重攀爬或下楼梯使特别是下 螺旋楼梯,使位于左右两侧的主动轮304靠近,增强对重心的支撑,对抗下落 冲击,有利于平稳负重。在螺旋楼梯旋转处,距离较远的两个台阶之间的夹角 较大,而相邻的两个台阶接近互相平行,将位于左右两侧的主动轮304靠近, 进而使两侧的主动轮304分别处于两个接近互相平行的台阶上利于行进。例如在攀爬时,左侧的主动轮304位于下方台阶的水平面上,右侧的主动轮304位 于相邻上方台阶的水平面上,能够同步提供动力。若左右两侧的主动轮304间 距较远分别在夹角较大的两个台阶上时,位于右侧的两个主动轮304很可能其 中一个在下方台阶上,另外一个在上方台阶上,进而先攀爬的主动轮304导致 另外一个主动轮304悬空,不利于螺旋楼梯的攀爬,进行下楼梯也同理,集中 靠近的主动轮304位于左侧或位于右侧的主动轮304能够同时下落在同一个台 阶上,进而持续平稳的提供动力。攀爬或下楼时具有减震与降噪的效果。保护 栏401用于保护驱动机构,当两个边架4靠近时,位于左右两侧的主动轮304 靠近,与此同时位于前侧或后侧的两个保护栏401进一步向内凹陷,实现中间 窄两边宽的保护结构,中间窄的部分也应宽于两个驱动机构,实现保护,导轮 403便于在楼梯边端进行导向,无需精准控制主动轮304的转速实现转弯,所述 中间窄两边宽的保护结构便于通过螺旋楼梯中弯曲的壁面,不发生刮蹭。启动 电动推杆Ⅱ501,电动推杆Ⅱ501的活动端带动调节板502左右运动,调节板502 的位置可以改变,适应大小不同的物品,调节板502用于防止攀爬或下降时导 致运载的物体滑落。夹持板6结合调节板502使用可以夹持物品,进而使物品得到更好的固定,夹持板6与调节板502的间距可调,进而可以夹持大小不同 的物品,夹持板6可以随越障模式进行适应性调整,如在螺旋楼梯中,夹持板6 会自动略微靠近调节板502,实现临时增大夹紧力,避免爬楼或下落时导致物品 掉落。避免长时间夹紧力过大导致外包装或物品损坏。
当然,上述说明并非对本发明的限制,本发明也不仅限于上述举例,本技 术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替 换,也属于本发明的保护范围。
- 一种多足智能越障机器人
- 一种轮足转换式可越障爬壁机器人及其越障方法