一种条烟箱成品出库系统及其控制方法
文献发布时间:2023-06-19 09:54:18
技术领域
本发明属于条烟箱出库技术领域,具体涉及一种条烟箱成品出库系统及其控制方法。
背景技术
条烟箱成品出库目前通过人工操作顶升式伸缩皮带装车机完成:装有条烟的纸箱用顶升式伸缩皮带装车机运送到开车箱体内,人工手动逐个将纸箱搬至卡车箱体内逐层摆放,由卡车运送出库房。产效率较低,企业用人成本较高,经营风险较大。
发明内容
本发明的目的在于针对现有技术的不足之处,提供一种条烟箱成品出库系统及其控制方法。由协作机器人及其夹具、顶升式伸缩皮带装车机条烟箱定位附件、协作机器人安装底座组成,通过软件系统根据出货量、箱式货车吨位计算条烟箱码垛垛型,实现条烟箱定位、垛型计算、码垛全流程自动化智能化成品出库。本方案中整体系统采用协作机器人,保证了系统的安全性。
为解决上述技术问题,本发明采用如下技术方案:一种条烟箱成品出库系统,包括条烟箱输送带、顶升式伸缩皮带装车机、协作机器人及其夹具和PLC控制系统,所述顶升式伸缩皮带装车机两侧安装定位气缸,所述定位气缸端部安装定位板,定位板上安装接近开关,条烟箱到达顶升式伸缩皮带装车机端部定位板后,接近开关给出信号,所述PLC控制系统控制顶升式伸缩皮带装车机上两侧安装定位气缸对条烟箱进行对夹定位;视觉系统对条烟箱进行轮廓尺寸采集、精确定位,协作机器人及其夹具安装在顶升式伸缩皮带装车机的踏板上,协作机器人及其夹具根据顶升式伸缩皮带装车机上两侧安装定位气缸的定位信号以及视觉系统尺寸数据及位置坐标,依次吸取条烟箱,根据所述PLC控制系统计算的垛型进行摆放码垛;当完成一排的条烟箱码垛后,顶升式伸缩皮带装车机根据位移传感器所检测的数据自动向后方移动,保证条烟箱成品出库系统中协作机器人统一适当的工作空间。
进一步,所述协作机器人及其夹具包括底座和协作机器人及机器人夹具,所述协作机器人安装在所述底座上,所述底座固定连接在顶升式伸缩皮带装车机的踏板上,所述机器人夹具安装在协作机器人第六轴上。
进一步,所述机器人夹具包括连接件,所述连接件固定连接在协作机器人第六轴上,L型安装板固定连接在所述连接件上,在L型安装板上安装多个吸盘,用于吸取条烟箱。
进一步,还包括PLC控制系统和视觉系统以及位移传感器,所述视觉系统、位移传感器、协作机器人及其夹具和所述接近开关与所述PLC控制系统通信连接。
本发明还提供一种条烟箱成品出库系统控制方法,其特征在于,包括如下步骤:
S1.条烟箱从输送带上输送至顶升式伸缩皮带装车机上,顶升式伸缩皮带装车机上端部安装的定位板上所安装的接近开关给出信号;
S2.PLC控制系统控制所述定位气缸对条烟箱进行对夹定位;
S3.所述视觉系统对条烟箱进行轮廓尺寸采集以及精确位置进行检测;
S4.协作机器人及其夹具根据顶升式伸缩皮带装车机上两侧安装定位气缸的定位信号以及视觉系统尺寸、位置数据,依次吸取条烟箱;
S5.PLC控制系统根据视觉系统对条烟箱轮廓尺寸采集数据识别处条烟箱规格,根据不同规格的出库箱式货车计算出最优码垛形式,控制协作机器人及其夹具执行相应动作进行码垛。
进一步,所述步骤S3中,视觉系统中包括相机和光源,光源从四个方向照射条烟箱,保证光源能够打亮条烟箱四周的同时条烟箱上方不被光源照亮,相机安装高度为不同型号条烟箱两倍长和高乘积的最大值。
进一步,所述步骤S2中,所述相机对条烟箱拍照获取图像后,通过视觉背景差分方法获得条烟箱整体轮廓,再通过canny算子和轮廓查找算法将图像中的噪点去除只保存轮廓特征,通过轮廓匹配算法,用harris角点提取条烟箱的四个角点,根据四个角点之间的距离关系来确定条烟箱的长、宽,与存储的规格型号匹配,确定现在的条烟箱规格型号,同时根据这四个角点确认条烟箱的中心点坐标和条烟箱的方向。
进一步,所述步骤S2中,根据四个角点之间的距离关系来确定条烟箱的长、宽,与存储的规格型号匹配具体采用方法为视觉系统获取条烟箱轮廓图片后,随机选取一个图片轮廓像素点并沿着该轮廓某一个方向逐个像素点进行计算自相关函数E(u,v)值,根据据自相关函数E(u,v)值判定是否为条烟箱角点,根据调试时非角点的自相关函数值波动情况设定一个阈值,当自相关函数值大于该阈值时认为该点为角点;
harris角点提取方式通过自相关函数E(u,v)=Σ
依次找出条烟箱轮廓的四个角点,将四个角点依次连线,得到线长;之后程序通过寻找到存储模板中的角点所连成线的线长,和视觉图片中的角点连线线长进行匹配,从而确定出条烟箱的型号规格;根据定位条烟箱的边缘计算出协作机器人抓取位置,通过TCPIP通讯协议将精确位置信息传送给条烟箱成品出库PLC控制系统。
进一步,所述步骤S5中,所述PLC控制系统识别出条烟箱的型号规格后,人工选择条烟箱码垛方向,输入条烟箱总量、车型,视觉系统自动识别条烟箱长宽高,确定其规格型号,并将数据传输给PLC控制系统,PLC控制系统根据协作机器人执行动作所需数据提取源数据传输给协作机器人系统,协作机器人执行相应的动作;以箱式货车车厢码垛平面码满为前提,根据条烟箱总量、车型、码垛方向计算出码垛的行数、列数、层数,计算码垛垛型;根据所得到的垛型协作机器人实际进行码垛时优先进行行码垛,列码垛次之,最后进行层码垛。
与现有技术相比,本发明的有益效果为:现有技术条烟箱成品出库操作都是由人工完成,该系统完全替代了人工操作,实现了条烟箱定位、垛型计算、码垛全流程的自动化智能化。该系统有诸多有益效果:(1)一种条烟箱成品出库系统是协作机器人在条烟箱成品出库装车工位上的首次应用;(2)根据条烟箱成品出库的总量、规格、型号以及箱式货车的吨数,由系统内部控制算法自动计算最优码垛垛型,大大提高了生产的智能化;(3)一种条烟箱成品出库系统码垛摆放位置精确,不易出现条烟箱摆放松散导致最后一个条烟箱入垛困难的现象;(4)协作机器人本身就可以与人进行交互作业,当某一个协作机器人出现故障时,人工可直接替代,并可与另一台协作机器人交互作业;由于协作机器人本身的重量较轻,也可以选择拆除故障协作机器人,方便后期维护,保证条烟箱成品出库的多样性,保证正常生产。
附图说明
图1为本发明条烟箱成品出库系统整体示意图;
图2为本发明条烟箱成品出库系统结构示意图;
图3为本发明协作机器人结构示意图;
图4为本发明协作机器人夹爪结构示意图;
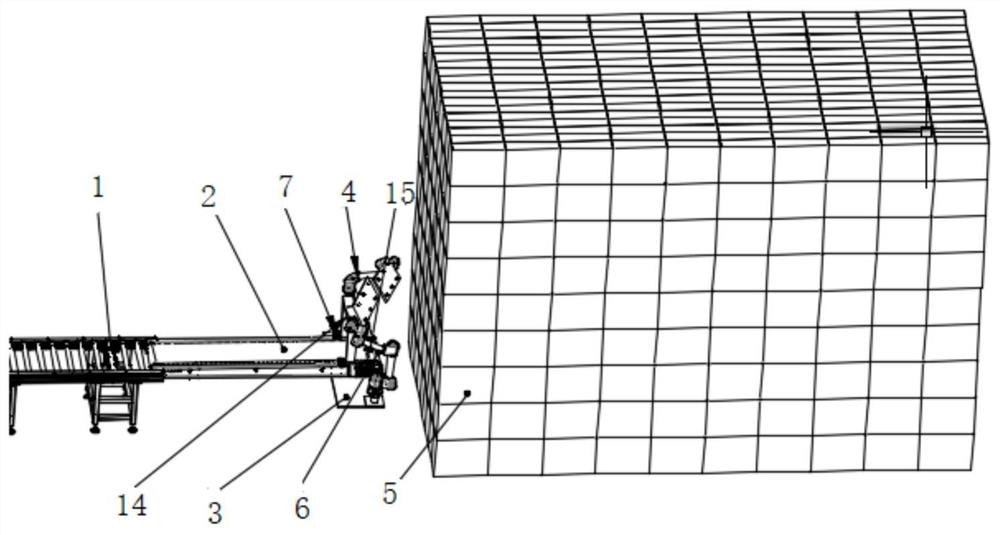
图中,1—输送带,2-顶升式伸缩皮带装车机,3-踏板,4-协作机器人及其夹具,5-条烟箱垛,6-定位板,7-定位气缸,8-底座,9-协作机器人,10-机器人夹具,11-连接件,12-L型安装板;13-吸盘;14-视觉系统;15-位移传感器。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
需要说明的是,下述实施方案中所述实验方法,如无特殊说明,均为常规方法,所述试剂和材料,如无特殊说明,均可从商业途径获得;在本发明的描述中,术语“横向”、“纵向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,并不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
如图1-4所示,本申请实施例提供一种条烟箱成品出库系统,包括条烟箱输送带1、顶升式伸缩皮带装车机2、协作机器人及其夹具4和PLC控制系统,所述顶升式伸缩皮带装车机2两侧安装定位气缸7,所述定位气缸7端部安装定位板6,定位板6上安装接近开关,条烟箱到达顶升式伸缩皮带装车机2端部定位板6后,接近开关给出信号,所述PLC控制系统控制顶升式伸缩皮带装车机2上两侧安装定位气缸7对条烟箱进行对夹定位;视觉系统14对条烟箱进行轮廓尺寸采集、精确定位,协作机器人及其夹具4安装在顶升式伸缩皮带装车机2的踏板3上,协作机器人及其夹具4根据顶升式伸缩皮带装车机2上两侧安装定位气缸7的定位信号以及视觉系统14尺寸数据及位置坐标,依次吸取条烟箱,根据所述PLC控制系统计算的垛型进行摆放码垛;当完成一排的条烟箱码垛后,形成条烟箱垛5,顶升式伸缩皮带装车机2根据位移传感器15所检测的数据自动向后方移动,保证条烟箱成品出库系统中协作机器人9统一适当的工作空间。在上述实施例中,根据条烟箱成品出库的种类、规格、数量,分别配备不同吨位的出库箱式货车,现有技术中一般采用的出库箱式货车分为20T、25T、30T;一种条烟箱成品出库系统提供人工输入界面,系统根据人工输入的装车条烟箱的种类、规格、数量以及出库箱式货车的吨位,由一套完整的控制算法自动计算出最优的码垛形式,并控制协作机器人及其夹具4执行相应的动作。
进一步优选的实施例中,所述协作机器人及其夹具4包括底座8和协作机器人9及机器人夹具10,所述协作机器人安装在所述底座8上,所述底座8固定连接在顶升式伸缩皮带装车机2的踏板3上,所述机器人夹具10安装在协作机器人第六轴上。机器人夹具10包括连接件11,所述连接件11固定连接在协作机器人第六轴上,L型安装板12固定连接在所述连接件11上,在L型安装板12上安装多个吸盘13,用于吸取条烟箱。
在上述实施例中,上述条烟箱成品出库系统在箱式货车一个相对限制的空间内作业,并且箱式货车装满条烟箱后运输离开,所以体积相对较大的工业六轴机器人就无法在此空间内应用或者固定安装于某个位置,考虑到顶升式伸缩皮带装车机2的承载重量,工业六轴机器人更无法安装在顶升式伸缩皮带装车机2上;因此协作机器人重量较轻,作业范围较小的有点得到有效应用;协作机器人的安装方式并不是固定安装在某个位置,而是安装于顶升式伸缩皮带装车机2的踏板3上,顶升式伸缩皮带装车机2的踏板3会随着码垛位置的变化而进行升降,因此协作机器人及其夹具4会跟随顶升式伸缩皮带装车机2的踏板3进行运动,以保证条烟箱的成功码垛。人工在操作顶升式伸缩皮带装车机2装车码垛条烟箱时,会出现摆放码垛的过程中条烟箱之间摆放相对松散,导致摆放最后一个条烟箱时困难,人工操作硬挤进垛内;而协作机器人在进行条烟箱码垛摆放的时候可以有效解决该问题:协作机器人及其夹具4从顶升式伸缩皮带装车机2上取到条烟箱后,尽量靠箱式货车内壁侧摆放,并且摆放相对精确,有效避免了由于条烟箱摆放松散而导致最后的条烟箱入垛的困难;为了彻底杜绝这个问题,在系统控制时会进行最后一个条烟箱的两侧条烟箱倾斜摆放,使最后一个条烟箱空间成“八”字型,这样最后一个条烟箱进入“八”字口后再整体推入垛体内,彻底解决了该问题。
进一步优选的实施例中,还包括PLC控制系统和视觉系统14以及位移传感器15,所述视觉系统14、位移传感器15、协作机器人及其夹具4和所述接近开关与所述PLC控制系统通信连接。
在上述实施例中,当一种条烟箱成品出库系统中某一个协作机器人及其夹具4出现故障时,可以将该故障协作机器人及其夹具4断电,人工替代该故障协作机器人并与另一个正常的协作机器人交互作业,不会影响条烟箱成品出库的正常进行;故障协作机器人不需要拆除,顶升式伸缩皮带装车机2的踏板3上保留有协作机器人故障后人工操作位置;当然选择拆除以便后续维修也可以;一种条烟箱成品出库系统兼顾了多重选择,确保了成品出库的顺利进行。
本发明实施例还提供一种条烟箱成品出库系统控制方法,其特征在于,包括如下步骤:
S1.条烟箱从输送带1上输送至顶升式伸缩皮带装车机2上,顶升式伸缩皮带装车机2上端部安装的定位板6上所安装的接近开关给出信号;
S2.PLC控制系统控制所述定位气缸7对条烟箱进行对夹定位;
S3.所述视觉系统14对条烟箱进行轮廓尺寸采集以及精确位置进行检测;
S4.协作机器人及其夹具4根据顶升式伸缩皮带装车机2上两侧安装定位气缸7的定位信号以及视觉系统14尺寸、位置数据,依次吸取条烟箱;
S5.PLC控制系统根据视觉系统14对条烟箱轮廓尺寸采集数据识别处条烟箱规格,根据不同规格的出库箱式货车计算出最优码垛形式,控制协作机器人及其夹具4执行相应动作进行码垛。
所述步骤S3中,视觉系统14中包括相机和光源,光源从四个方向照射条烟箱,保证光源能够打亮条烟箱四周的同时条烟箱上方不被光源照亮,相机安装高度为不同型号条烟箱两倍长和高乘积的最大值。其中视觉系统14光源打开,光源从四个方向照射条烟箱,根据设计角度保证光源能够打亮条烟箱四周的同时条烟箱上方不被光源照亮,相机拍照,相机通过调整曝光和曝光时间,能够保证,只有条烟箱上表面是暗的。相机安装高度定位精度为条烟箱长度的5%,选取相机安装高度为不同型号条烟箱两倍长和高乘积的最大值可以避免条烟箱不同尺寸时,光源难以保证打光均匀的问题。
在上述步骤S2中,所述相机对条烟箱拍照获取图像后,通过视觉背景差分方法获得条烟箱整体轮廓,再通过canny算子和轮廓查找算法将图像中的噪点去除只保存轮廓特征,通过轮廓匹配算法,用harris角点提取条烟箱的四个角点,根据四个角点之间的距离关系来确定条烟箱的长、宽,与存储的规格型号匹配,确定现在的条烟箱规格型号,同时根据这四个角点确认条烟箱的中心点坐标和条烟箱的方向。
所述步骤S2中,根据四个角点之间的距离关系来确定条烟箱的长、宽,与存储的规格型号匹配具体采用方法为视觉系统14获取条烟箱轮廓图片后,随机选取一个图片轮廓像素点并沿着该轮廓某一个方向逐个像素点进行计算自相关函数E(u,v)值,根据据自相关函数E(u,v)值判定是否为条烟箱角点,根据调试时非角点的自相关函数值波动情况设定一个阈值,当自相关函数值大于该阈值时认为该点为角点;
harris角点提取方式通过自相关函数E(u,v)=∑
依次找出条烟箱轮廓的四个角点,将四个角点依次连线,得到线长;之后程序通过寻找到存储模板中的角点所连成线的线长,和视觉图片中的角点连线线长进行匹配,从而确定出条烟箱的型号规格;根据定位条烟箱的边缘计算出协作机器人抓取位置,通过TCPIP通讯协议将精确位置信息传送给条烟箱成品出库PLC控制系统。
所述步骤S5中,所述PLC控制系统识别出条烟箱的型号规格后,人工选择条烟箱码垛方向,输入条烟箱总量、车型,视觉系统14自动识别条烟箱长宽高,确定其规格型号,并将数据传输给PLC控制系统,PLC控制系统根据协作机器人执行动作所需数据提取源数据传输给协作机器人系统,协作机器人执行相应的动作;以箱式货车车厢码垛平面码满为前提,根据条烟箱总量、车型、码垛方向计算出码垛的行数、列数、层数,计算码垛垛型;根据所得到的垛型协作机器人实际进行码垛时优先进行行码垛,列码垛次之,最后进行层码垛。
在上述实施例中,根据条烟箱出库批次总量、规格型号、出库车型确定码垛的不同垛型;箱式货车条烟箱出库车型有三种吨位,分别为:20T/25T/30T,对应车厢尺寸分别为:13.5m*2.7m*4.2m/14m*2.7m*4.3m/16.5m*3m*4.4m,人工选择条烟箱码垛方向(横向码垛、纵向码垛),输入条烟箱总量、车型,视觉系统自动识别条烟箱长宽高,确定其规格型号,并将数据传输给PLC控制系统,PLC控制系统根据协作机器人执行动作所需数据提取源数据传输给协作机器人系统,协作机器人执行相应的动作;以箱式货车车厢码垛平面码满为前提,根据条烟箱总量、车型、码垛方向计算出码垛的行数、列数(人面朝车头横向为行数纵向为列数)、层数,计算码垛垛型;根据所得到的垛型协作机器人实际进行码垛时优先进行行码垛,列码垛次之,最后进行层码垛。以其中一种规格条烟箱纵向码垛为例,视觉系统获取条烟箱的长637mm、宽412mm、高592mm,与存储的每一种规格的长、宽、高匹配确定其型号规格,并将数据传输给PLC控制系统,协作机器人系统执行动作所需数据为源数据条烟箱的宽412mm、高592mm,PLC控制系统提供条烟箱的宽412mm、高592mm传输给协作机器人系统,传输条烟箱长637mm、高592mm给顶升式伸缩皮带装车机系统,以20T箱式货车为例计算垛型:20T箱式货车车厢内部尺寸为13.5m*2.7m*4.2m,以箱式货车车厢码垛平面码满为前提,即优先计算行数、列数,后进行层计算;行计算2700/412=6(余228),6个条烟箱间隙为7个,228/7=32.57mm;列计算13500/637=21(余123),21个条烟箱间隙为22个,123/22=5.59mm;层计算4200/592=7(余56,高度方向需要保证协作机器人的夹爪高度空间,高度不够减层数)这样垛型为6行×21列×7层,并且相互间的间隙为最优,以此为基础逐个码垛,直到条烟箱码完,提示装车完成,或者直到箱式货车码满,系统提示更换车辆继续码垛;协作机器人建立绝对坐标系统,根据垛型可知箱式货车车厢行、列、层方向每个方向条烟箱码垛数量,以及行方向、列方向最优的间隔距离,在绝对坐标系统中每个条烟箱所码垛的坐标位置可以计算出来,协作机器人将每个条烟箱码垛于对应坐标位置即可;协作机器人每完成6行×1层条烟箱的码垛后顶升式伸缩皮带装车机会向高度方向升高592mm,协作机器人每完成1行×7层条烟箱的码垛后顶升式伸缩皮带装车机会向列方向后移637mm;在此例下条烟箱成品出库系统单个协作机器人在行方向码垛的数量为3个,选取协作机器人的臂展,保证所有车厢兼容通用;顶升式伸缩皮带装车机系统在列向、高度方向移动条烟箱长度、高度距离以保证码垛空间;当码垛完成后,顶升式伸缩皮带装车机自动退出箱式货车车厢。
本发明的保护范围不限于上述的实施例,显然,本领域的技术人员可以对本发明进行各种改动和变形而不脱离本发明的范围和精神。倘若这些改动和变形属于本发明权利要求及其等同技术的范围,则本发明的意图也包含这些改动和变形在内。
- 一种条烟箱成品出库系统及其控制方法
- 一种卷烟厂成品库烟箱出库双侧扫描系统